
技术摘要:
本申请公开了一种获取目标位置的方法、装置、电子设备及介质。其中,本申请中,在获取包含目标对象的第一航拍图像之后,可以基于第一航拍图像以及预设的卷积神经网络模型,计算目标对象在第一航拍图像中的第一位置参数,并基于目标对象的第一位置参数以及对应的第一多 全部
背景技术:
由于通信时代和社会的兴起,智能设备已经随着越来越多用户的使用而不断发 展。 以无人机航拍设备为例,随着各种无人机平台的逐步普及应用,人们对区域测绘、 高精度测绘和实时测绘的研究与开发越来越关注,相比较于传统航天遥感平台所展现出来 的作业耗时较长,机动性能差,识别精度低,应用门槛高等不可避免的因素影响,无人机凭 借其独有的高机动、高灵活、高效率及低消耗等优点,成功成为传统遥感平台和常规航空摄 影测量技术的合理代替,尤其在小范围的高精度目标识别和高清影像快速获取等方面。 然而,相关技术中在利用无人机等航拍设备获取到航拍影像后,通常是将其存储 在存储卡中并待无人机飞回地面后,将航拍影像传输到计算机中,然后进行图像拼接和目 标识别与定位等,这种方式的定位时间较长。无法满足一些场景的需求,因此,如何发明一 种快速定位目标位置的方法,成为了本领域技术人员需要解决的问题。
技术实现要素:
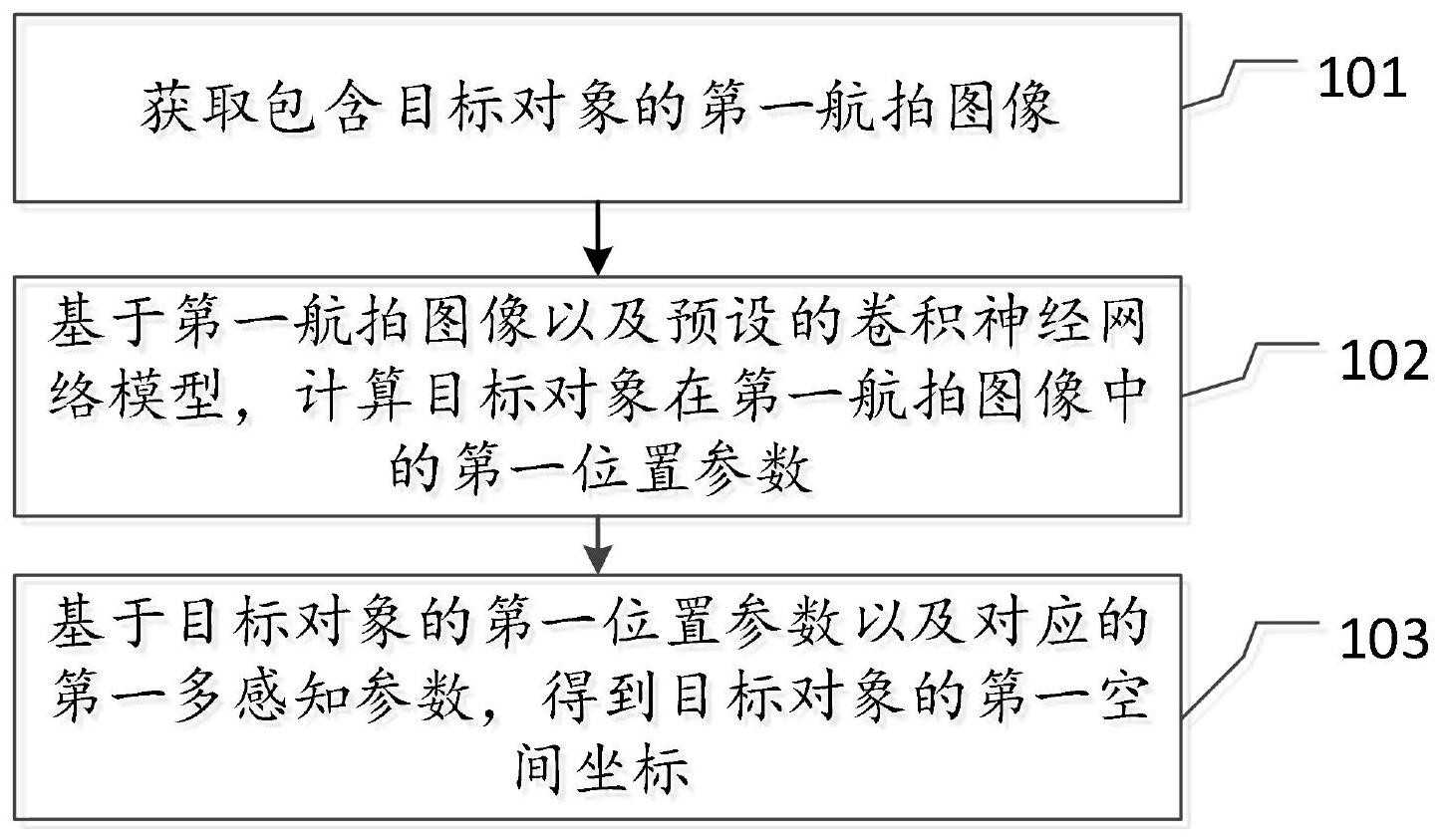
本申请实施例提供一种获取目标位置的方法、装置、电子设备及介质,本申请实施 例用于解决相关技术中存在的在获取到航拍影像后,需要后期进行图像拼接和目标识别与 定位等方式导致的定位时间较长的问题。 其中,根据本申请实施例的一个方面,提供的一种获取目标位置的方法,其特征在 于,包括: 获取包含目标对象的第一航拍图像; 基于所述第一航拍图像以及预设的卷积神经网络模型,计算所述目标对象在所述 第一航拍图像中的第一位置参数; 基于所述目标对象的第一位置参数以及对应的第一多感知参数,得到所述目标对 象的第一空间坐标,所述第一多感知参数用于表征所述第一航拍图像的拍摄环境。 可选地,在基于本申请上述方法的另一个实施例中,在所述获取包含目标对象的 第一航拍图像之后,还包括: 获取航拍设备拍摄所述第一航拍图像时对应的所述第一多感知参数,其中所述多 感知参数至少包括高度参数、空间位置参数以及三轴姿态参数的其中一种; 基于所述目标对象的第一位置参数以及所述航拍设备对应的第一多感知参数,得 到所述目标对象的第一空间坐标。 可选地,在基于本申请上述方法的另一个实施例中,在所述获取包含目标对象的 第一航拍图像之后,还包括: 4 CN 111583339 A 说 明 书 2/15 页 获取所述航拍设备对应的设备参数,并基于所述设备参数对所述第一航拍图像进 行透视畸变校正,得到第一校正图像; 基于所述三轴姿态参数,对所述第一校正图像进行正射畸变校正,得到第二校正 图像; 基于所述第二校正图像以及所述卷积神经网络模型,计算所述目标对象在所述第 一航拍图像中的第一位置参数。 可选地,在基于本申请上述方法的另一个实施例中,所述基于所述目标对象的第 一位置参数以及对应的第一多感知参数,得到所述目标对象的第一空间坐标,包括: 将所述目标对象的第一位置参数变换到ECEF坐标系,得到第二位置参数; 将所述第二位置参数变换到预设坐标系,得到所述目标对象的第一空间坐标,所 述预设坐标系包括WGS84以及CGCS2000坐标系的任意一种。 可选地,在基于本申请上述方法的另一个实施例中,利用如下公式将所述目标对 象的第一位置参数变换到ECEF坐标系,得到第二位置参数: 以及, 利用如下公式将所述第二位置参数变换到预设坐标系,得到所述目标对象的第一 空间坐标(LBH): 其中,xs,ys,zs对应于所述目标对象的第一位置参数。 可选地,在基于本申请上述方法的另一个实施例中,在所述得到所述目标对象的 第一空间坐标之后,还包括: 获取至少一张包含所述目标对象的第二航拍图像,所述第二航拍图像为与所述第 一航拍图像相比,在不同拍摄环境下获取的图像; 基于所述第二航拍图像以及所述卷积神经网络模型,计算所述目标对象在所述第 二航拍图像中的第二位置参数; 基于所述目标对象的第二位置参数以及对应的第二多感知参数,得到所述目标对 象的第二空间坐标,所述第二多感知参数用于表征所述第二航拍图像的拍摄环境; 基于所述目标对象的所述第一空间坐标以及所述第二空间坐标,得到所述目标对 象的三维空间坐标。 可选地,在基于本申请上述方法的另一个实施例中,所述基于所述目标对象的所 述第一空间坐标以及所述第二空间坐标,得到所述目标对象的三维空间坐标,包括: 5 CN 111583339 A 说 明 书 3/15 页 利用卡尔曼滤波算法,对所述第一空间坐标以及所述第二空间坐标进行迭代计 算,得到所述目标对象的三维空间坐标。 根据本申请实施例的另一个方面,提供的一种获取目标位置的装置,包括: 获取模块,被设置为获取包含目标对象的第一航拍图像; 计算模块,被设置为基于所述第一航拍图像以及预设的卷积神经网络模型,计算 所述目标对象在所述第一航拍图像中的第一位置参数; 生成模块,被设置为基于所述目标对象的第一位置参数以及对应的第一多感知参 数,得到所述目标对象的第一空间坐标,所述第一多感知参数用于表征所述第一航拍图像 的拍摄环境。 根据本申请实施例的又一个方面,提供的一种电子设备,包括: 存储器,用于存储可执行指令;以及 显示器,用于与所述存储器显示以执行所述可执行指令从而完成上述任一所述获 取目标位置的方法的操作。 根据本申请实施例的还一个方面,提供的一种计算机可读存储介质,用于存储计 算机可读取的指令,所述指令被执行时执行上述任一所述获取目标位置的方法的操作。 本申请中,在获取包含目标对象的第一航拍图像之后,可以基于第一航拍图像以 及预设的卷积神经网络模型,计算目标对象在第一航拍图像中的第一位置参数,并基于目 标对象的第一位置参数以及对应的第一多感知参数,得到目标对象的第一空间坐标,其中 第一多感知参数用于表征第一航拍图像的拍摄环境。通过应用本申请的技术方案,可以在 获取到航拍图像后,利用预设的神经网络模型计算得到目标对象在航拍图像中的坐标位 置,并将该坐标位置转换到预设的坐标系中进而生成该目标的三维空间坐标。进而避免由 于相关技术中存在的需要对图像进行剪切后才可以得到目标坐标位置所导致的效率不高 的问题。 下面通过附图和实施例,对本申请的技术方案做进一步的详细描述。 附图说明 构成说明书的一部分的附图描述了本申请的实施例,并且连同描述一起用于解释 本申请的原理。 参照附图,根据下面的详细描述,可以更加清楚地理解本申请,其中: 图1为本申请提出的获取目标位置的系统架构示意图; 图2为本申请提出的一种获取目标位置的方法的示意图; 图3为本申请提出的航拍设备传输及处理航拍图像的架构图示意图; 图4为本申请提出的一种训练预设神经网络模型的流程图; 图5为本申请提出的针对目标对象的坐标系转换的示意图; 图6为本申请提出的一种获取目标位置的方法流程示意图; 图7为本申请获取目标位置的装置的结构示意图; 图8为本申请显示电子设备结构示意图。 6 CN 111583339 A 说 明 书 4/15 页











