
技术摘要:
本发明提供了一种星球探测车车轮主动跟随控制方法、控制系统及星球探测车,涉及机器人控制技术领域。其中星球探测车车轮主动跟随控制方法,包括下述步骤:任选所述星球探测车的一个或多个车轮作为支撑轮,调整所述支撑轮的转速,使所述支撑轮的实时挂钩牵引力Fx趋近于目 全部
背景技术:
轮式移动机器人被广泛用于月球、火星等天体的探测,这些天体表面松软崎岖的 地形对轮式移动系统提出了巨大的挑战。增加车轮数量可以降低车轮平均负载,减小车轮 沉陷和滑转,但会引出多轮移动机器人的冗余控制与能源消耗问题。当星球探测车的车轮 处于不同的地形时,各个车轮的运动状态不同,从而产生较大的内力对抗,导致星球探测车 移动效率下降。因此,驱动轮之间的协调控制是充分发挥星球探测车牵引能力和节省能源 的一个重要问题。 目前,实现驱动轮之间协调控制的方法为根据轮-地之间的相互作用,建立星球探 测车的运动学模型,实现基于最优车轮滑转率的协调控制。这种方法不仅存在建立准确模 型的难题,并且为了提高星球探测车的牵引能力而忽视了因车轮间内力对抗而产生的能耗 问题,导致轮式移动机器人的驱动轮能耗较高。
技术实现要素:
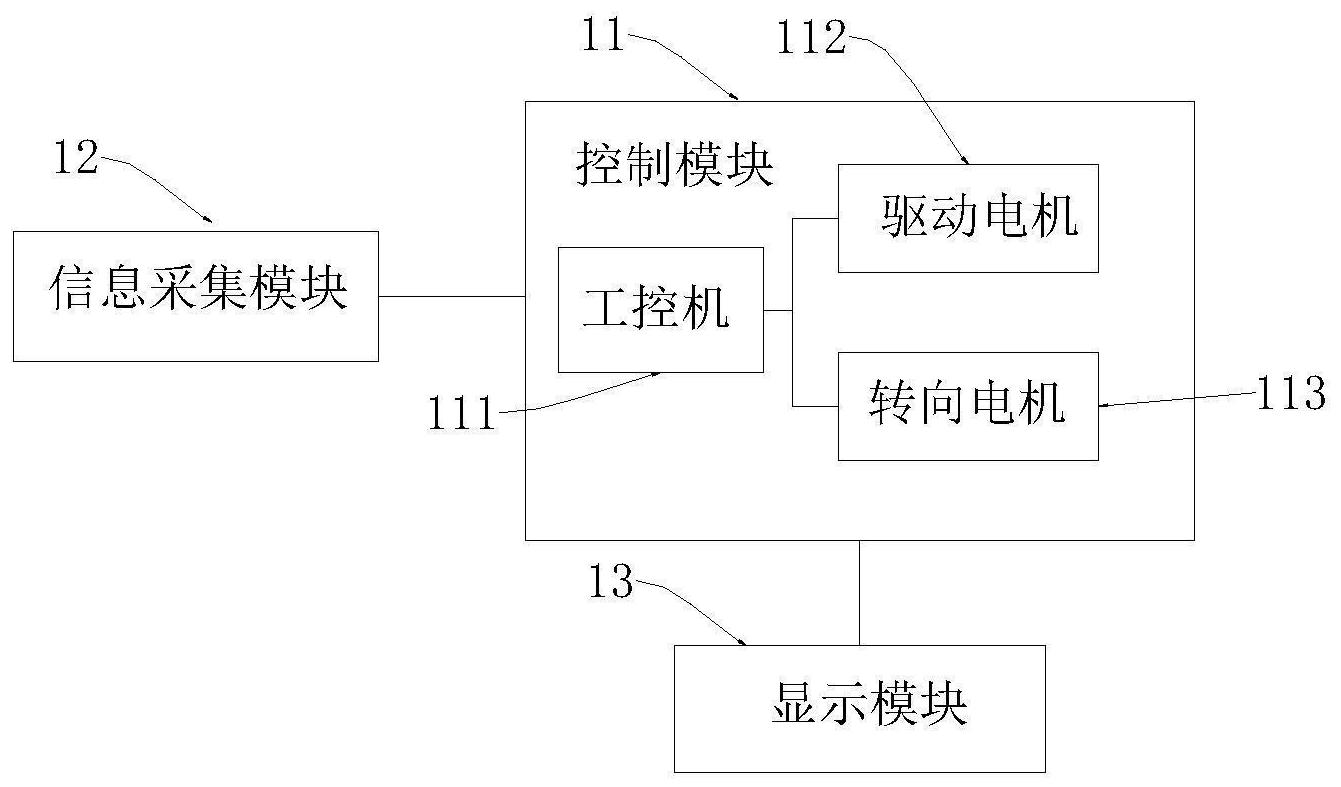
本发明解决的问题是在增加车轮数量、降低车轮平均负载的情况下,减小各车轮 之间的内力对抗,保证星球探测车具有较高效率。 为解决上述问题,本发明提供一种星球探测车车轮主动跟随控制方法,所述方法 包括:任选所述星球探测车的一个或多个车轮作为支撑轮,调整所述支撑轮的转速,使所述 支撑轮的实时挂钩牵引力Fx趋近于目标挂钩牵引力Fxd,以减小所述支撑轮对所述星球探测 车的驱动力及阻力,使所述支撑轮用于对所述星球探测车车体提供支持力。 进一步地,所述方法还包括:调整所述支撑轮的转角,使所述支撑轮的实时侧向力 Fy趋近于目标侧向力Fyd。 进一步地,所述目标挂钩牵引力Fxd、所述目标侧向力Fyd均为零。 进一步地,在调整所述支撑轮的转速,使所述实时挂钩牵引力Fx趋近于所述目标 挂钩牵引力Fxd的过程中,包括:首先判断所述实时挂钩牵引力Fx是否小于所述目标挂钩牵 引力Fxd,如果是,则使所述支撑轮的转速增加,直至所述实时挂钩牵引力Fx趋近于所述目标 挂钩牵引力Fxd;如果否,则使所述支撑轮的转速减小,直至所述实时挂钩牵引力Fx趋近于所 述目标挂钩牵引力Fxd。 进一步地,在调整所述支撑轮的转角,使所述实时侧向力Fy趋近于所述目标侧向 力Fyd的过程中,包括:首先判断所述实时侧向力Fy和所述目标侧向力Fyd是否相等,如果否, 则调整所述支撑轮的转角,直至所述实时侧向力Fy接近所述目标侧向力Fyd,如果是,则过程 结束。 一种采用上述方法的星球探测车车轮控制系统,包括控制模块、信息采集模块, 4 CN 111605729 A 说 明 书 2/6 页 所述信息采集模块用于采集所述支撑轮的实时挂钩牵引力Fx,并将采集的所述实 时挂钩牵引力Fx传输至所述控制模块, 所述控制模块用于将所述实时挂钩牵引力Fx与目标挂钩牵引力Fxd比较,并根据比 较结果控制所述支撑轮的转速,以使所述支撑轮的实时挂钩牵引力Fx趋近于所述目标挂钩 牵引力Fxd,以减小所述支撑轮对所述星球探测车的驱动力及阻力,使所述支撑轮用于对所 述星球探测车车体提供支持力。 进一步地,所述信息采集模块还用于采集所述支撑轮的实时侧向力Fy,并将采集 的所述实时侧向力Fy传输至所述控制模块, 所述控制模块用于将所述实时侧向力Fy与目标侧向力Fyd相比较,并根据所述实时 侧向力Fy与所述目标侧向力Fyd的比较结果控制所述支撑轮的角度,使所述支撑轮的实时侧 向力Fy趋近于所述目标侧向力Fyd,以减小所述支撑轮对所述星球探测车的驱动力及阻力, 使所述支撑轮用于对所述星球探测车车体提供支持力。 进一步地,所述控制模块包括工控机、驱动电机及转向电机,所述驱动电机及所述 转向电机的一端均与所述工控机连接,所述驱动电机及所述转向电机的另一端均与所述支 撑轮连接,所述工控机用于将所述实时挂钩牵引力Fx与所述目标挂钩牵引力Fxd相比较,将 所述实时侧向力Fy与所述目标侧向力Fyd相比较,并根据比较结果通过所述驱动电机控制所 述支撑轮的转速,通过所述转向电机控制所述支撑轮的角度。 进一步地,所述工控机根据所述实时挂钩牵引力Fx与所述目标挂钩牵引力Fxd的比 较结果将所述支撑轮的目标转速传输至所述驱动电机,通过所述驱动电机控制所述支撑轮 获得目标转速,所述工控机根据所述实时侧向力Fy与所述目标侧向力Fyd的比较结果,将目标 转角传输至所述转向电机,通过所述转向电机控制所述支撑轮的角度。 进一步地,所述信息采集模块包括力传感器,所述力传感器设置于所述支撑轮的 轮轴上。 进一步地,所述信息采集模块还包括第一编码器、第二编码器,所述控制模块还连 接有显示模块,所述第一编码器、所述第二编码器均设置于所述支撑轮的轮轴上,所述第一 编码器用于采集所述支撑轮的转速信息,并将所述转速信息经所述控制模块传输至所述显 示模块,所述第二编码器用于采集所述支撑轮的角度信息,并将所述角度信息经所述控制 模块传输至所述显示模块。 一种星球探测车,包括上述星球探测车车轮控制系统。 由于通过调整支撑轮的转速,使支撑轮的实时挂钩牵引力Fx趋近于目标挂钩牵引 力Fxd,支撑轮主要用于对车体提供支持力,支撑轮对车体运动产生的驱动力及阻力很小,在 增加车轮数量、降低车轮平均负载的情况下,减小各车轮之间的内力对抗,保证星球探测车 具有较高的移动效率。 附图说明 图1为本发明星球探测车车轮主动跟随控制方法中调整支撑轮转速的流程图; 图2为本发明星球探测车车轮主动跟随控制方法中调整支撑轮转角的流程图; 图3为本发明星球探测车车轮控制系统的结构图; 图4为三轮星球探测车的支撑轮的受力分析示意图; 5 CN 111605729 A 说 明 书 3/6 页 图5为三轮星球探测车的支撑轮与车体之间的内力和垂直方向上的内力矩分析示 意图。 图6a为采用本发明星球探测车车轮主动跟随控制方法得到的支撑轮的速度曲线 图; 图6b为采用本发明星球探测车车轮主动跟随控制方法得到的支撑轮的角度曲线 图; 图6c为采用本发明星球探测车车轮主动跟随控制方法得到的支撑轮的挂钩牵引 力曲线图; 图6d为采用本发明星球探测车车轮主动跟随控制方法得到的支撑轮的侧向力曲 线图; 图6e为采用本发明星球探测车车轮主动跟随控制方法得到的支撑轮与车体之间 的内力曲线图; 图6f为采用本发明星球探测车车轮主动跟随控制方法得到的支撑轮与车体之间 的内力矩曲线图。 附图标记说明: 11-控制模块;111-工控机;112-驱动电机;113-转向电机;12-信息采集模块;13- 显示模块。











