
技术摘要:
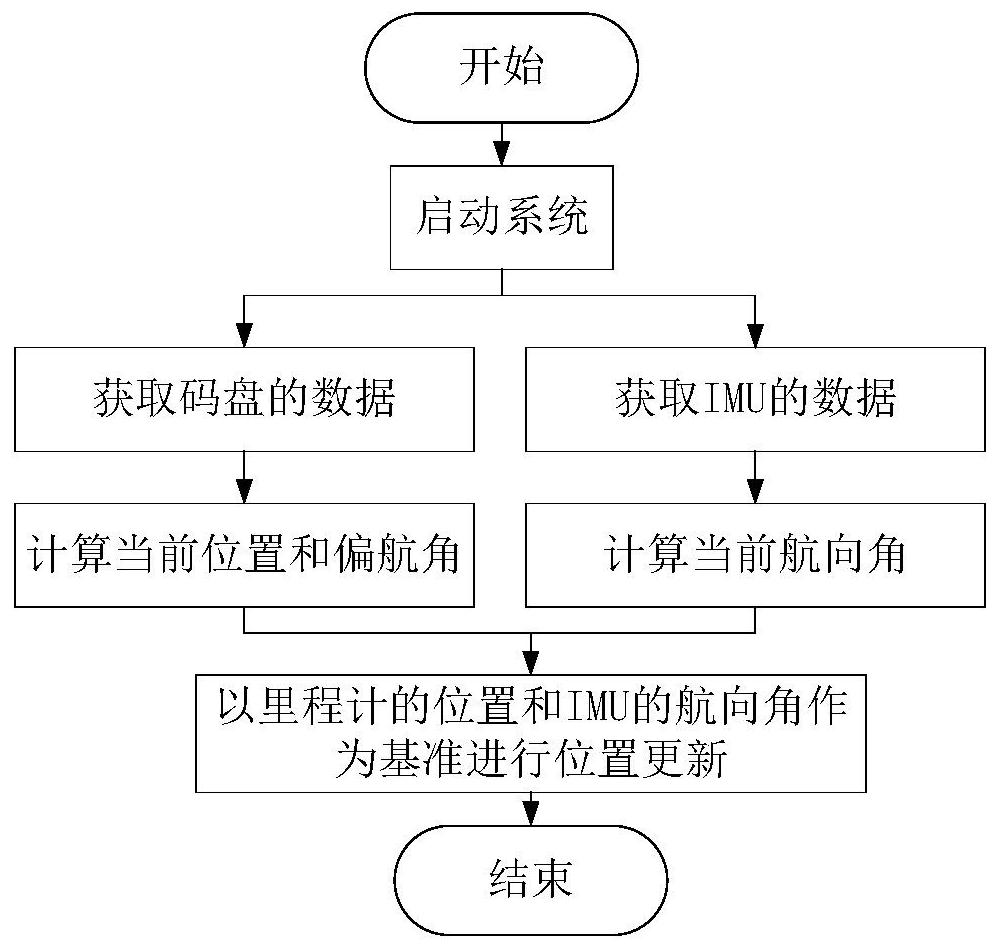
本发明涉及车辆、系统定位技术领域,具体公开了一种基于IMU和码盘融合的车辆定位方法,包括如下步骤,包括如下步骤,步骤1,启动系统;步骤2,获取码盘数据,计算当前位置和航向角θ;步骤3,获取IMU数据计算当前航向角;步骤4,以码盘的x,y坐标和IMU的航向角为基准, 全部
背景技术:
机器人的定向方法具有两大难点:精度和实时性。传统的基于里程计定向方 法由 于机器人在行进中打滑等异常情况从而导致定向不准确;现有定向系统主要 包含有基于 轮式里程计定向系统,基于IMU的定向系统,基于GPS的定向系统, 基于视觉里程计的定向 系统,但存在不足: 1、基于轮式里程计定向系统的缺点:基于轮式里程计定向系统是通过里程 计获 取机器人的移动信息来计算其当前姿态。但是由于码盘精度低以及轮子存在 打滑、侧翻的 现象,轮式里程计的定向效果很差。 2、基于IMU的定向系统的缺点:基于IMU的定向系统是通过IMU获取机 器人的加速 度信息,然后积分求得其当前姿态。但是由于其姿态角是通过积分得 到,会随着时间而导 致其误差增大,其定向在机器人长时间移动中精度较差。 3、基于GPS的定向系统的缺点:基于GPS的定向系统是通过计算机接收 卫星发射 的信号进行定位定向的。但是GPS易受到信号的限制,当信号被遮挡 时或反射时,其精度下 降严重,尤其是当机器人在室内封闭环境下将无法实现定 位定向。 4、基于视觉里程计的定向系统的缺点:基于视觉里程计的定向系统是通过 对获 取的图像进行匹配,然后根据特征点的运动变化估计机器人的运动参数。其 缺点在于视觉 里程计常采用稀疏特征点匹配技术,当检测到的特征点少时,容易 造成误匹配。当场景变 化较大时,也难以进行匹配。而且,处理视觉图像需要花 费更多的时间,难以达到实时性的 要求。
技术实现要素:
本发明的目的在于提供一种基于IMU和码盘融合的车辆定位方法。 为了达到上述目的,本发明的基础方案提供一种基于IMU和码盘融合的车 辆定位 方法,包括如下步骤, 步骤1,启动系统; 步骤2,获取码盘数据,计算当前位置和航向角θ; 步骤3,获取IMU数据计算当前航向角; 步骤4,以码盘的x,y坐标和IMU的航向角为基准,进行位置更新。 进一步,步骤3具体为通过对姿态进行获取并利用惯导计算航向角。 进一步,步骤2中,设车辆两轮的轮式里程计给出的车左轮、右轮转动距离 ΔdrL、 ΔdrR,设车轮轮中心为Mr,其瞬时速度为vr,则满足如下公式 3 CN 111578925 A 说 明 书 2/5 页 进一步,步骤3中,设 是tm时刻的姿态四元数,简记为 是tm-1时 刻的姿态四元数,简记为 是以n系为参考坐标系时,b 系从tm-1时刻到tm的变 换四元数, 的计算利用到载体坐标系相对于导航 坐标系的转动角速度 记ηm 是从tm-1时刻到tm时刻载体坐标系b相对于导 航坐标系n的等效旋转矢量,则满足如下公式 本发明的优点如下: (1)本发明使用码盘和IMU相结合的方法来组成定位系统,计算过程简单, 避免繁 琐的计算,相较于视觉里程计方法,计算效率得到提高,达到实时性的要 求。 (2)本发明使用码盘和IMU相结合的方法来组成定向系统,通过组合方式 获得最 优定向结果。相较于单纯使用里程计和IMU的方法,精度得到提高。 (3)本发明使用码盘和IMU相结合的方法来组成定向系统,相较于视觉里 程计、 GPS等方法,制作成本更低,满足低成本机器人的制造。 (4)本发明使用码盘和IMU相结合的方法来组成定向系统,在计算航向角 的过程 中,计算过程简单,计算效率高,达到实时性的要求。对求出的航向角进 行组合的方式,获 得最优结果,可以获得更高精度的定向结果。 附图说明 图1为本发明一种基于IMU和码盘融合的车辆定位方法的逻辑框图; 图2为本发明方法和视觉里程计方法计算效率对比结果图; 图3为本发明方法和轮式里程计方法平均误差对比结果图。











