
技术摘要:
本发明公开一种用于渔光互补场景下光伏清洁机器人的故障救援方法,包含清洁机器人、光伏组件、救援机器人、摆渡车、换行轨道,包含以下几个步骤:S10:清洁机器人发生故障时向摆渡车发送故障位置信息;S20:摆渡车搭载救援机器人从换行轨道的停止位启动,根据所述故障信 全部
背景技术:
现代光伏发电系统中,“渔光互补”发电模式是一种将光伏和渔业相结合的一种新 型发电模式,该方式可利用鱼塘、滩涂、芦苇荡滩等闲置土地来开发建设光伏发电系统,解 决了建设光伏电站土地资源的稀缺难题。但在电站长期运行过程中,由于空气中的灰尘在 光伏组件表面的沉积作用,灰尘对光伏组件的发电效率和使用寿命会产生较大的影响。随 着光伏电站的大规模建设应用,为提高电站的发电效率,需定期对光伏组件进行清洁维护。 但受限于组件复杂的安装环境,传统的人工清洁方式成本高、效率低,组件维护不便。 近年来,随着自动化清洁技术的快速发展,越来越多的自动化清洁机器人投入到 光伏电站的运行维护当中,用于实现对光伏组件表面积灰的自动化清洁,此举大大提高了 光伏组件的维护效率。 但在清洁机器人的长期使用过程中,会出现结构磨损或卡死等机械故障,造成清 洁机器人在工作时意外停机而无法正常工作,此时需要运维管理人员及时对清洁机器人进 行检修和故障排除。当前,对于发生故障的光伏组件清洁机器人,主要由运维管理人员通过 小船或长梯等工具涉水前往故障清洁机器人所在地点,现场对清洁机器人进行故障检查和 维修。由于故障清洁机器人常位于水面以上一定的高度,并与水面成一定的倾角,利用小船 或长梯等现场维护故障清洁机器人时存在效率低且安全性不高的问题,因此急需一种可将 故障清洁机器人牵引至光伏组件边缘后进行拆卸并维护的方法。
技术实现要素:
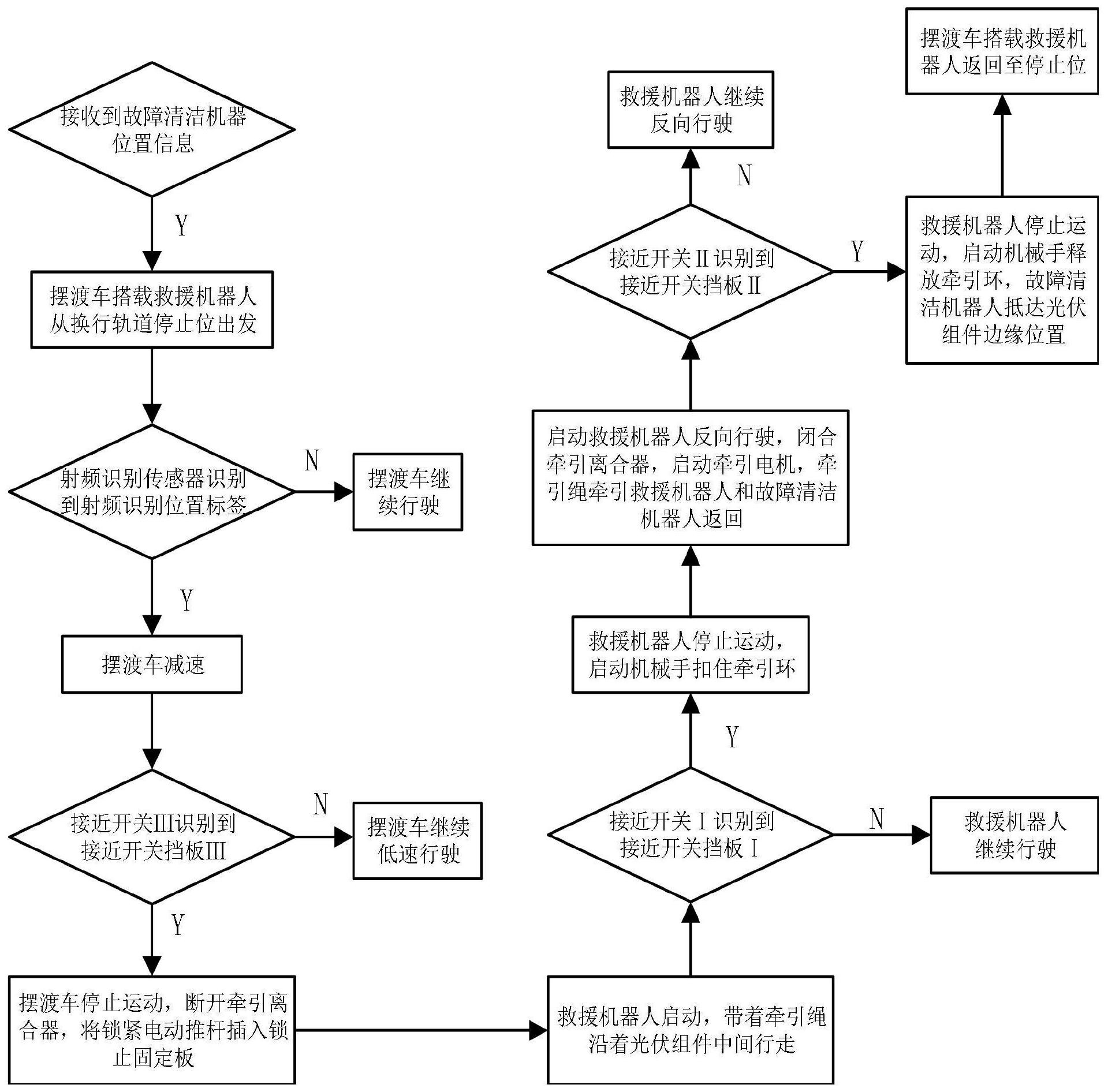
本发明的目的在于提供一种在渔光互补场景下光伏清洁机器人发生故障时的救 援方法,用高效、安全的救援方法实现将故障清洁机器人牵引至光伏组件边缘便于运维管 理人员拆卸并维护。 本发明公开的一种用于渔光互补场景下光伏清洁机器人的故障救援方法包含清 洁机器人、光伏组件、救援机器人、摆渡车、换行轨道,包括如下步骤: S10:清洁机器人发生故障时向摆渡车发送故障位置信息; S20:摆渡车搭载救援机器人从换行轨道的停止位启动,根据所述故障信息位置抵 达故障清洁机器人所在光伏组件; S30:启动救援机器人沿着所述光伏组件抵达故障清洁机器人处,牵引故障清洁机 器人返,当救援机器人返回至摆渡车时断开和故障清洁机器人连接,此时故障清洁机器人 正好抵达至光伏组件的边缘。 所述一种用于渔光互补场景下光伏清洁机器人的故障救援方法具有相应的控制 系统,所述控制系统控制清洁机器人、摆渡车及救援车之间的信息交互,控制搭载救援机器 4 CN 111555706 A 说 明 书 2/6 页 人的摆渡车停放在故障清洁机器人对应的光伏组件边缘,控制救援机器人牵引故障清洁机 器人返回、停放至摆渡车上,此时运维管理人员已能够高效安全地将位于光伏组件旁边的 故障清洁机器人拆卸并维修。 进一步的,所述故障清洁机器人滑动连接于光伏组件的上下边,故障清洁机器人 靠近换行轨道的一侧设置牵引环及接近开关挡板Ⅰ,救援机器人设置驱动装置Ⅰ、机械手、牵 引绳、接近开关Ⅰ及接近开关Ⅱ,所述机械手及接近开关Ⅰ位于救援机器人的一侧,所述牵引 绳及接近开关Ⅱ位于救援机器人的另一侧,所述接近开关Ⅰ用于识别接近开关挡板Ⅰ实现救 援机器人停在故障清洁机器人处,所述机械手用于扣接牵引环实现救援机器人和故障清洁 机器人的连接;所述摆渡车设置驱动装置Ⅱ、牵引电机、牵引离合器、牵引绞盘及支座,所述 牵引绳的另一端固定连接牵引绞盘,所述牵引电机通过牵引离合器和牵引绞盘进行连接, 所述牵引电机带动牵引绞盘转动实现牵引绳牵引救援机器人及故障清洁机器人返回;所述 支座用于停放救援机器人,且倾斜角度和光伏组件的角度误差在2到3度之间,所述支座远 离光伏组件的一侧具有接近开关挡板Ⅱ,所述接近开关Ⅱ用于识别接近开关挡板Ⅱ用于实 现将救援机器人停放至摆渡车上,同时机械手和牵引环断开连接。 进一步的,所述S30包括如下步骤: S31:启动救援机器人沿着所述光伏组件行走,当救援机器人的接近开关Ⅰ识别到 故障清洁机器人的接近开关挡板Ⅰ时,救援机器人停止运动; S32:救援机器人启动机械手扣住故障清洁机器人的牵引环,救援机器人反向运 动;摆渡车牵引离合器闭合,启动牵引电机带动牵引绞盘旋转通过牵引绳将救援机器人及 故障清洁机器人反向牵引; S33:当救援机器人的接近开关Ⅱ识别到摆渡车支座的接近开关挡板Ⅱ时,救援机 器人停止运动同时启动机械手断开与清洁机器人牵引环的连接,此时故障清洁机器人正好 到达至光伏组件的边缘位置。 控制系统通过驱动装置Ⅰ控制救援机器人在光伏组件行走,当接近开关Ⅰ识别到接 近开关挡板Ⅰ时,控制系统通过驱动装置Ⅰ控制救援机器人停止行走,此时救援机器人到达 故障清洁机器人位置;控制系统控制救援机器人的机械手扣住故障清洁机器人的牵引环; 控制系统通过驱动装置Ⅰ反向驱动救援机器人在光伏组件行走,同时闭合牵引离合器、启动 牵引电机带动牵引绞盘的反向转动实现救援机器人牵引故障清洁机器人沿光伏组件返回; 当接近开关Ⅱ识别到接近开关挡板Ⅱ时,控制系统通过驱动装置Ⅰ控制救援机器人停止运 动并控制机械手释放牵引环,此时救援机器人正好停至摆渡车上且故障清洁机器人位于光 伏组件的边缘。 进一步的,所述摆渡车的一侧设置射频识别传感器及接近开关Ⅲ,所述换行轨道 的一侧设置射频识别位置标签及接近开关挡板Ⅲ,所述射频识别位置标签用于标记每排光 伏组件所在位置,所述接近开关挡板Ⅲ用于将救援机器人对齐光伏组件的中线位置。 进一步的,所述S20包括如下步骤: S21:摆渡车搭载救援机器人从换行轨道的停止位启动,当摆渡车的射频识别传感 器识别到射频识别位置标签时,驱动装置Ⅱ对摆渡车进行减速; S22:当摆渡车的接近开关Ⅲ识别到接近开关挡板Ⅲ时停止运动,同时断开牵引离 合器。 5 CN 111555706 A 说 明 书 3/6 页 控制系统通过驱动装置Ⅱ控制摆渡车从换行轨道的停止位启动,当射频识别传感 器识别到射频识别位置标签时,控制系统通过驱动装置Ⅱ控制摆渡车减速,当接近开关Ⅲ 识别到接近开关挡板Ⅲ时,控制系统通过驱动装置Ⅱ控制摆渡车停止运动,救援机器人正 好对齐光伏组件的中线位置方便救援机器人平衡拉动故障清洁机器人;控制系统断开牵引 离合器方便救援机器人可拉着牵引绳沿着光伏组件行走。 进一步的,所述摆渡车中间设置位置相反的多个锁紧电动推杆,所述换行轨道的 两侧设置锁止固定板,所述锁紧电动推杆插入锁止固定板用于将摆渡车固定在换行轨道, 有效地解决了由于外力导致摆渡车在换行轨道位移发生意外的问题。 进一步的,所述S20包括如下步骤: S23:将摆渡车的锁紧电动推杆插入换行轨道的锁止固定板。 当接近开关Ⅲ识别到接近开关挡板Ⅲ时,控制系统通过驱动装置Ⅱ控制摆渡车停 止运动后,控制系统控制锁紧电动推杆插入锁止固定板。 进一步的,所述支座远离换行轨道一侧的中间位置设置滑轮,所述牵引绳通过滑 轮连接于牵引绞盘,所述滑轮可减少牵引绳和支座一侧的摩擦阻力,增加救援机器人的工 作时长。 进一步的,所述救援机器人设有无线通信模块Ⅰ,摆渡车设有控制器及无线通信模 块Ⅱ,清洁机器人设有无线通信模块Ⅲ。 控制系统包含控制器、无线通信模块Ⅰ、无线通信模块Ⅱ、驱动装置Ⅰ及驱动装置 Ⅱ、接近开关Ⅰ、接近开关Ⅱ、接近开关Ⅲ、射频识别传感器、牵引电机、牵引离合器、机械手 及锁紧电动推杆,所述驱动装置Ⅰ、接近开关Ⅰ、机械手、接近开关Ⅱ通过CAN总线连接通过无 线通信模块Ⅰ和无线通信模块Ⅱ进行通信从而实现控制器对救援机器人各种动作的完成, 所述控制器、驱动装置Ⅱ、射频识别传感器、接近开关Ⅲ、牵引电机、牵引离合器及锁紧电动 推杆通过CAN总线通信。 进一步的,一种用于渔光互补场景下光伏清洁机器人的故障救援方法还包括: S40:摆渡车搭载救援机器人返回至停止位,方便摆渡车搭载救援机器人实施二次 救援。 本发明公开的一种用于渔光互补场景下光伏清洁机器人的故障救援方法的有益 效果是:1、采用故障清洁机器人主动告知维修位置并采用摆渡车搭载救援机器人自主抵达 故障清洁机器人所在的光伏组件,利用救援机器人自主发现并停靠在故障清洁机器人的位 置,同时将故障清洁机器人牵引至光伏组件边缘方便运维管理人员拆卸并维护,解决了运 维管理人员在光伏组件现场维修故障清洁机器人效率低且安全性不高的问题;2、限制摆渡 车支座的倾斜角度方便救援机器人驶离和返回摆渡车,利用接近开关Ⅰ及接近开关挡板Ⅰ准 确识别故障清洁机器人的位置,机械手实现救援机器人和故障清洁机器人的固定,牵引绳、 牵引电机、牵引离合器实现救援机器人和故障清洁机器人的反向牵引,接近开关Ⅱ及接近 开关挡板Ⅱ实现救援机器人停在摆渡车上;3、利用射频识别传感器及射频识别位置标签、 接近开关Ⅲ及接近开关挡板Ⅲ识别故障清洁机器人所在光伏附件同时将救援机器人对准 光伏组件的中线位置以便救援机器人平衡拉动故障清洁机器人行走;4、在摆渡车上设置电 动锁止装置避免外力导致摆渡车在换行轨道位移发生意外;5、在摆渡车的支座上设置滑轮 减少牵引绳和支座一侧的摩擦阻力,增加救援机器人的工作时长;6、救援机器人完成救援 6 CN 111555706 A 说 明 书 4/6 页 工作后摆渡车返回至换行轨道的停止位,方便摆渡车搭载救援机器人实施二次救援。 附图说明 图1:本发明实施例中一种用于渔光互补场景下光伏清洁机器人的故障救援方法 对应的装置结构图。 图2:本发明实施例中一种用于渔光互补场景下光伏清洁机器人的故障救援方法 对应的摆渡车结构图。 图3:本发明实施例中一种用于渔光互补场景下光伏清洁机器人的故障救援方法 对应的救援机器人及故障清洁机器人结构图。 图4:本发明实施例中一种用于渔光互补场景下光伏清洁机器人的故障救援方法 对应的控制系统结构图。 图5:本发明实施例中一种用于渔光互补场景下光伏清洁机器人的故障救援方法 流程图。











