
技术摘要:
一种定位系统,使用基于拍卖的合作定位方法来确定本地位姿估计或本地位姿状态校正。基于拍卖的合作定位方法由合作社的成员通过接收相对位置测量来触发,并且由合作社的中标成员合作处理,其中合作社是指具有定位/位置可确定设备的自动驾驶车辆和乘客的集合,所述定位/ 全部
背景技术:
在未知环境中进行探测的自动驾驶车辆(AV)在以计划或非计划的轨迹导航以到 达其目的地时面临许多挑战。许多AV任务依赖于对它们在空间中的位置和方向的准确了 解。定位是精确地确定AV在地球表面上的位置的过程。AV基于可用的绝对和相对测量来计 算它们的位姿(pose,即,位置和方向的组合)的估计。绝对测量通常依赖于无线电导航卫星 服务(RNSS)系统的可用性,RNSS系统诸如全球定位系统(GPS)、格洛纳斯系统(GLONASS)、伽 利略定位系统(Galileo)和北斗。 当RNSS数据由于环境或结构干扰而不可用时,例如在室外停车场、室内停车结构、 隧道和峡谷中,可以使用其它技术来获得相对测量。例如,这些技术可以包括超声定位系 统、超宽带系统、专用短程通信系统(DSRC)、蜂窝系统、AM/FM无线电、卫星通信、数字电视、 Wi-Fi、光检测和测距(激光雷达(LiDAR))、雷达、视频成像或它们的组合。蜂窝、AM/FM无线 电、卫星通信、数字电视(HDTV)、Wi-Fi被称为机会信号(SOP),其是不旨在用于定位、导航和 定时的环境信号。假定AV至少配备有RNSS和SOP接收器、微机电系统(MEMS)惯性测量单元 (IMU)、车轮速度传感器/车轮编码器/车辆速度传感器(VSS)(统称为车轮传感器)、处理硬 件和软件。AV还可具有摄像头,使得SOP可进一步包含可用的有源光源,例如路灯、停车场灯 或结构/建筑物灯。 解决RNSS限制的传统方法是将RNSS接收器与航位推测系统和地图匹配算法相融 合。然而,取决于所采用的定位技术,从多个同类或不同类的传感器确定的定位可能遭受高 定位准确度的损失、单点故障和能量效率低下以及通信延迟和分组丢失。
技术实现要素:
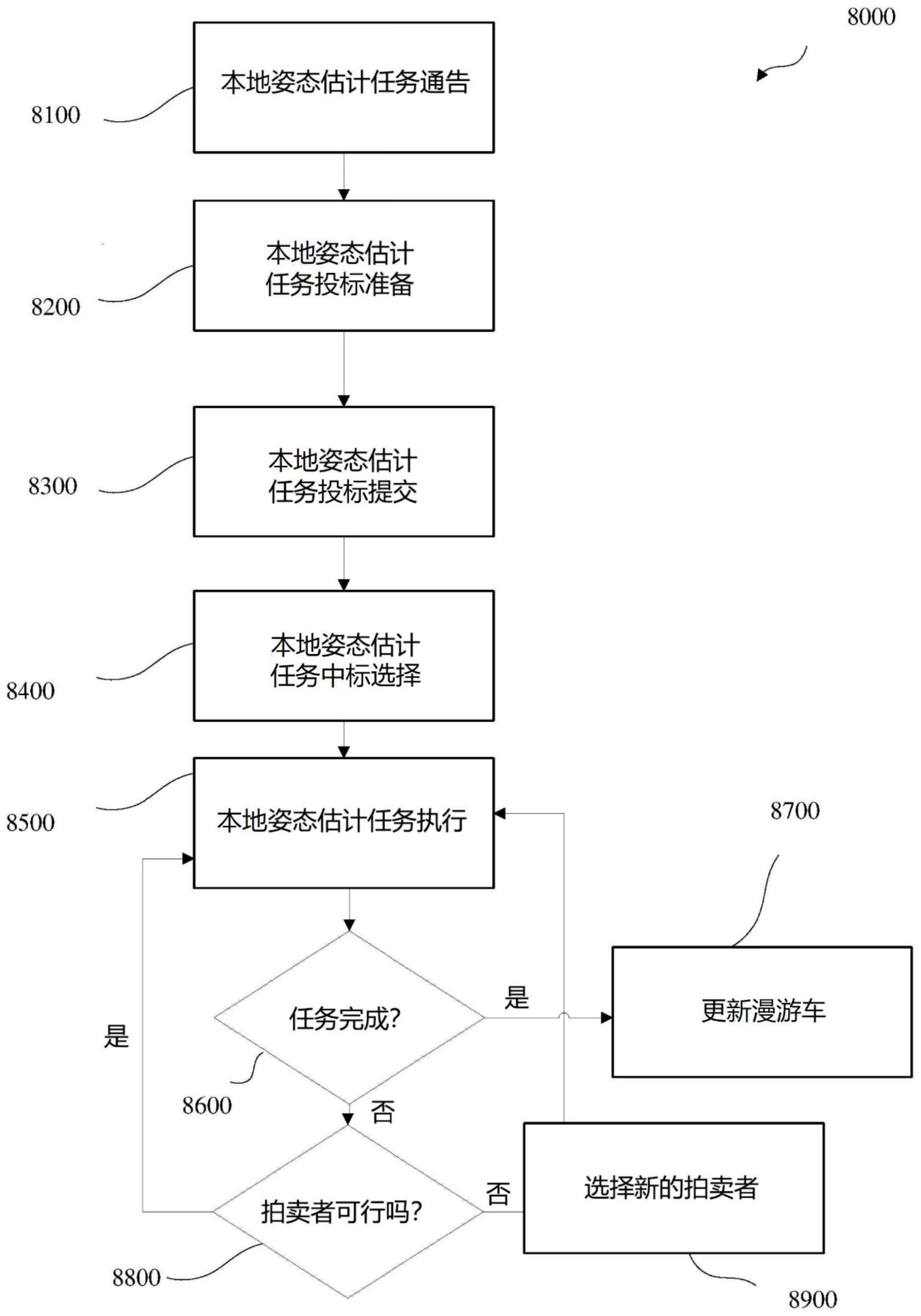
本文公开了在无线电导航卫星服务(RNSS)数据不可用时用于定位的方法和系统。 一种定位系统使用基于拍卖的合作定位方法来确定本地位姿估计或本地位姿状态校正。基 于拍卖的合作定位方法由合作社的成员通过接收相对位置测量来触发,并且由合作社的中 标成员合作处理,其中合作社是指具有定位/位置可确定设备的自动驾驶车辆和乘客的集 合,所述定位/位置可确定设备出于共享定位数据、位置数据等的目的而彼此通信。中标成 员为其自身确定本地位姿估计或本地位姿状态校正,并向合作社的其他成员提供本地位姿 估计或本地位姿状态校正。 附图说明 当结合附图阅读时,从以下详细描述中可以最好地理解本公开。要强调的是,根据 惯例,附图的各种特征不是按比例绘制的。相反,为了清楚起见,各种特征的尺寸被任意地 4 CN 111572526 A 说 明 书 2/18 页 扩大或缩小。 图1是根据本公开实施例的车辆的示例的图。 图2是图1所示的控制系统的示例的图。 图3是根据本公开实施例的车辆控制系统的示例的图。 图4是根据本公开实施例的包括车辆控制系统的车辆的侧视图的示例的图。 图5是根据本公开实施例的车辆控制系统的示例的图。 图6是根据本公开实施例的用于定位的通用框架的示例的图。 图7是根据本公开实施例的不同合作定位方法之间的示例折衷的框图。 图8是根据本公开实施例的用于定位的示例方法的流程图。 图9是根据本公开实施例的用于定位的示例方法的流程图。 图10是根据本公开实施例的拍卖者选择标准的示例的图。 图11是根据本公开实施例的示例定位结果的照片。 图12是根据本公开实施例的场景的示例的框图。











