
技术摘要:
本发明公开一种物联网磁粉探伤设备,包括探伤主体部分和远程控制部分;所述探伤主体部分包括磁化电流设定电路、磁化控制电路和主体端远程通信模块;所述远程控制部分包括第四MCU、控制端远程通信模块和输入/输出模块,所述第四MCU具有两个串口,一个串口与所述控制端远 全部
背景技术:
目前针对铁磁性材料存在裂纹、断裂风缺陷的检测方法较多,常见的有涡轮法、超 声波和磁粉法。其中,涡轮法虽然裂纹辨识的速度较快,但它的灵敏度不高。超声波检测方 法因成本较高不被广泛应用。 而磁粉检测法是利用磁场吸附磁性材料为原理,设计的一种用来检测工件中是否 存在像裂纹、断裂或者参有杂质等缺陷的一种检测方式,由于该方式原理简单造价较低,但 结果准确度较高,所以成为工业部门应用最早的一种无损检测方式,也是检测工件表面或 者表面层附近缺陷的较为方便的检测方式。 其利用的原理是:当物体表面处有缺陷时,由于刚体本身的磁导率和缺陷处的磁 导率存在差异,所以磁化后刚体材料的磁场在有缺陷的地方会出现磁场畸变的现象,在有 缺陷的地方会产生漏磁场,从而吸引磁粉在缺陷处。当给工件恰当的光照条件时,就可以通 过检测磁粉堆积的形状进而确定工件材料的缺陷,与标准缺陷库对比确定其缺陷类型,这 样就实现了磁粉探伤的无损检测。 磁粉探伤的工作流程是当磁性材料被磁场磁化以后,没有缺陷的地方磁感线会从 材料中穿过,当工件存在缺陷时,缺陷处的磁感线会出现紊乱形成漏磁场,此时在工件周围 加上磁粉时漏磁场会吸引磁粉通过观察磁粉的堆积情况可以得知工件缺陷的形状、大小。 磁粉探伤也由于其检测方式准确度高、成本相对其它像超声波检测而言较低、检测工艺简 单、检测速度较快等优点得到了越来越多企业的青睐。 然而目前磁粉探伤机还存在三大问题,一是,探伤设备的磁化电流准确度低,而且 探伤机进行磁化被测工件时,磁化电流达到指定电流的时间过长,会影响其他设备,同时也 会对工件带来损伤;二是,进行磁粉探伤时,由于采用人工加入荧光磁粉,会对工作人员带 来慢性的健康伤害;三是,许多探伤机探伤时存在误差,无法对误差进行及时的估计,造成 探伤的效果变差。
技术实现要素:
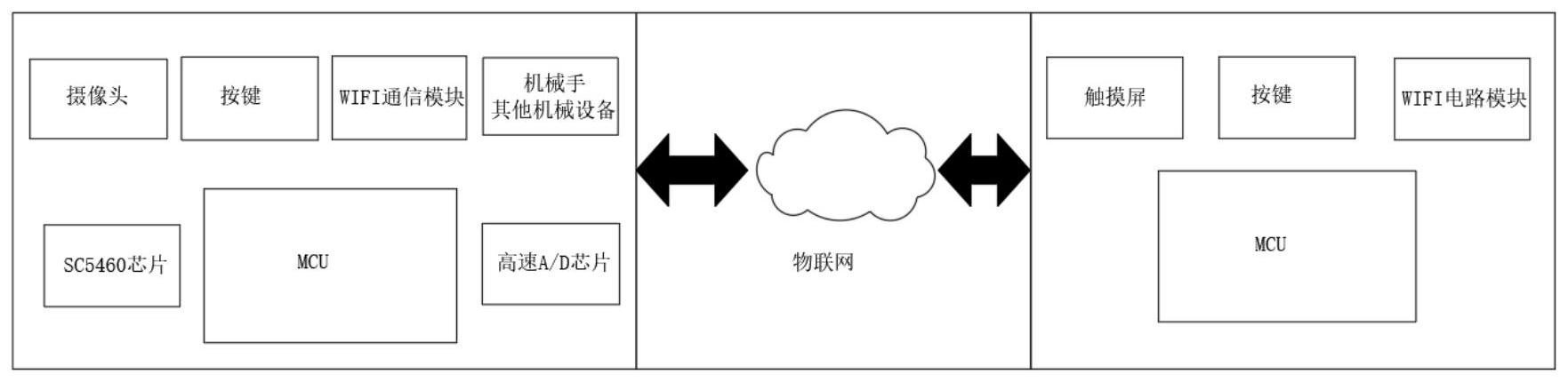
发明目的:本发明目的在于针对现有技术的不足,提供一种利用物联网进行远程 操作的磁粉探伤设备,同时提高探伤设备的磁化电流准确度,缩短磁化电流达到设定电流 的时间。 技术方案:本发明所述物联网磁粉探伤设备,包括探伤主体部分和远程控制部分; 其中,所述探伤主体部分包括磁化电流设定电路、磁化控制电路和主体端远程通 信模块; 所述磁化电流设定电路包括通讯连接的第一MCU、互感器和电流检测芯片,互感器 测量被测件的磁化电流,电流检测芯片采集电流信号并发送至第一MCU,第一MCU采用PID算 4 CN 111595935 A 说 明 书 2/6 页 法将采集的电流值与设定电流比较计算电流偏差,并向所述磁化控制电路发送控制信号; 所述磁化控制电路为三相交流调压电路,包括第二MCU、第三MCU、双向可控硅和变 压器;在周向磁化时,三相交流电的AB相接通双向可控硅,并串联变压器,变压器的负载为 被测件,第二MCU接收第一MCU发送的控制信号,控制所述双向可控硅导通角,调节磁化电流 大小;纵向磁化时,三相交流电的BC相接通双向可控硅,并串联变压器,变压器的负载为被 测件,第三MCU接收第一MCU发送的控制信号,控制所述双向可控硅导通角,调节磁化电流大 小; 所述第一MCU的串口与所述主体端远程通信模块的串口通讯连接,所述主体端远 程通信模块与所述远程控制部分建立远程通信连接; 所述远程控制部分包括第四MCU、控制端远程通信模块和输入/输出模块,所述第 四MCU具有两个串口,一个串口与所述控制端远程通信模块连接,另一串口与所述输入/输 出模块连接; 所述第一MCU将磁化过程电流和时间参数通过主体端远程通信模块上传至远程控 制部分,通过远程控制部分的输入/输出模块显示;所述远程控制部分的输入/输出模块输 入探伤主体部分的控制参数,并依次通过第四单片机、控制端远程通信模块和主体端远程 通信模块传送至探伤主体部分,远程控制所述探伤主体部分工作。 本发明进一步优选地技术方案为,所述探伤主体部分还包括摄像头、机械臂和磁 粉布置装置,所述摄像头通过主体端远程通信模块与所述远程控制部分通讯连接,向所述 远程控制部分传输探伤主体部分的图像,并在所述远程控制部分的输入/输出模块显示;所 述磁粉布置装置由所述机械臂控制在被测件周围布置磁粉,所述机械臂通过主体端远程通 信模块与所述远程控制部分通讯连接,接受所述远程控制部分控制。 作为优选地,所述探伤主体部分还包括两路过零点检测电路,两路过零点检测电 路分别与第二MCU和第三MCU连接,检测AB相交流电和BC相交流电的零点。 优选地,所述磁化电流设定电路的第一MCU采用变速积分PID算法将采集的电流值 与设定电流比较计算电流偏差。 优选地,在变速积分PID算法的每次计算结束添加有90ms延时。 优选地,在采用变速积分PID算法的两次计算之间采用牛顿样条有理插值算法,为 PID算法提供预判值。 优选地,所述第二MCU和第三MCU通过脉冲调制电路控制双向可控硅导通角,第二 MCU和第三MCU在以零点为标准的时间内形成可控硅触发脉冲,且脉冲调制电路调制的为宽 脉冲或高频脉冲方波。 优选地,所述电流检测芯片包括一大电流检测芯片和一小电流检测芯片,大电流 检测芯片和一小电流检测芯片通过I2C总线与第一MCU通信,大电流检测芯片采集电流信号 发送第一MCU;小电流检测芯片采集电流瞬间值发送至第一MCU,第一MCU对该电流瞬间值进 行真有效值计算,并比较计算结果是否达到阈值,根据比较结果选择大电流检测芯片采集 的电流信号或小电流检测芯片经真有效值计算后的值作为PID算法的输入值。 优选地,所述磁化电流设定电路在磁化过程中将PID算法实时追踪的电流参数记 录下来,并保存在第一MCU的FLAH中,磁化结束后,应用最小二乘法结合牛顿样条有理插值 算法拟合出追踪曲线,再和设定值进行比较,并显示比较结果。 5 CN 111595935 A 说 明 书 3/6 页 优选地,探伤主体部分的主体端远程通信模块为WiFi模块或GPRS DTU模块,所述 远程控制部分的控制端远程通信模块为WiFi模块。 有益效果:(1)本发明的物联网磁粉探伤设备包括探伤主体部分和远程控制部分, 且两部分上分别设置了远程通信模块,两部分通过远程通信模块远程通信从而形成基于互 联网或移动通信运营商网络的物联网,实现对探伤设备的远程操作,避免人工近距离操作 可能给操作者带来的健康危害;另外,探伤主体部分包括磁化电流设定电路和磁化控制电 路,磁化电流设定电路设定电流值的控制信号,磁化控制电路根据该控制信号控制双向可 控硅导通角,从而调节磁化电流大小,做到实时检测和调节磁化电流,提高探伤设备的磁化 电流准确度,缩短磁化电流达到设定电流的时间,避免探伤设备的磁化影响其他设备或对 工件带来损伤; (2)本发明中探伤主体部分还包括摄像头、机械臂和磁粉布置装置,通过摄像头可 以远程获取探伤主体部分的图像,通过机械臂和磁粉布置装置结合探伤主体部分的磁化装 置,实现完全远程进行磁粉探伤,进一步提高磁粉探伤的安全性,彻底解决了荧光磁粉对人 体造成伤害的问题; (3)本发明的探伤主体部分还包括两路过零点检测电路,基于传统的检测零点的 方法是检测B相交流电和零线之间的零点方法,而AB相交流电和B相交流电相位差30度,BC 相交流电与B相交流电相位差150度,因此本发明的两路过零点检测电路分别与第二MCU和 第三MCU连接,直接检测AB相交流电和BC相交流电的零点,不需要采样B相交流电的零点再 进行时间移位,同时本发明的两路过零点检测电路还可以确保在系统受到干扰后,不会出 现因零点大量偏移而导致系统出故障; (4)本发明中磁化电流设定电路的第一MCU采用变速积分PID算法,由于积分系数 Ki是常数,所以在整个控制过程中,积分增量是不变的,但是,系统对于积分项的要求是,系 统偏差大时,积分作用应该减弱甚至是全无,而在偏差小时,则应该加强,而积分系数取大 了会产生超调,甚至积分饱和,取小了又不能短时间内消除静差,因此本发明采用变速积分 PID算法,提高磁化电流设定电路计算电流偏差的准确度,从而进一步提升探伤设备的磁化 电流准确度; (5)由于磁化过程存在电流滞后,所以PID计算速度不能过快,需要加延时控制,实 验测试,该循环添加90ms的延时比较合适,而由于延时过长,导致追踪次数受限,所以PID算 法上要求精准,本发明在两次计算之间采用牛顿样条有理插值算法,为PID算法提供预判 值,节省近1/3的追踪时间,降低计算工作量,同时保证插值误差较低,不影响磁化电流准确 度; (6)本发明中为了避免发送的单个窄脉冲受干扰后丢失,因此第二MCU和第三MCU 发送宽脉冲或高频脉冲方波,有效抗干扰; (7)由于常规的检测电流芯片,在磁化电流较大时候,如大于1000A,测量较准确, 但磁化电流较小时,电流值会出现较大误差,本发明电流检测芯片包括一大电流检测芯片 和一小电流检测芯片,在磁化电流较小时候,采用小电流检测芯片配合真有效值算法,较大 时候自动切换到大电流检测芯片,兼顾了速度和准确度; (8)由于磁粉探伤设备是靠调节可控硅的开度大小来调节磁化电流,而开度大小 和电流之间是非线性关系,而且无法在一定时间内设置到合适的开度,所以当磁化电流存 6 CN 111595935 A 说 明 书 4/6 页 在误差的时候无法察知,造成探伤的效果变差,本发明在磁化过程中将PID算法实时追踪的 电流参数记录下来,并保存在第一MCU的FLAH中,磁化结束后,应用最小二乘法结合牛顿样 条有理插值算法拟合出追踪曲线,再和设定值进行比较,并显示比较结果,直观明了的显示 了本次磁化的质量,实现探伤设备的误差自诊断功能。 附图说明 图1为本发明的物联网磁粉探伤设备的模块示意图; 图2为本发明的磁化电流设定流程图; 图3为PID电流控制图; 图4为本发明的磁化控制电路图; 图5为本发明的宽脉冲输出和高脉冲输出原理图; 图6为传统的零点采样电路图; 图7为单片机控制可控硅的输出波形图; 图8为本发明的三相电不同零点检测电路图; 图9为本发明的探伤主体部分和远程控制部分通信电路图。











