
技术摘要:
本发明公开了一种车辆纵向运动控制方法、装置、设备及存储介质,涉及车辆控制技术领域,该方法包括:获取当前车辆信息和道路环境信息;根据所述当前车辆信息和所述道路环境信息判断是否存在行驶影响对象,并获取判断结果;根据所述判断结果确定车辆纵向运动控制模式; 全部
背景技术:
目前,随着智能网联汽车的发展,汽车行业内都在对自动驾驶汽车关键技术进行 深入研究。其中,运动控制系统作为实现自动驾驶功能的关键环节,车辆运动控制包含车辆 的纵向运动状态控制以及车辆的横向运动状态,运动控制系统直接对车辆的运动状态进行 控制,运动控制的性能好坏直接影响到驾乘人员主观的驾乘体验。因此,在保证了驾驶员安 全行驶的同时,如何实现车辆纵向运动控制,从而降低驾驶疲劳是亟待解决的技术问题。 上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技 术。
技术实现要素:
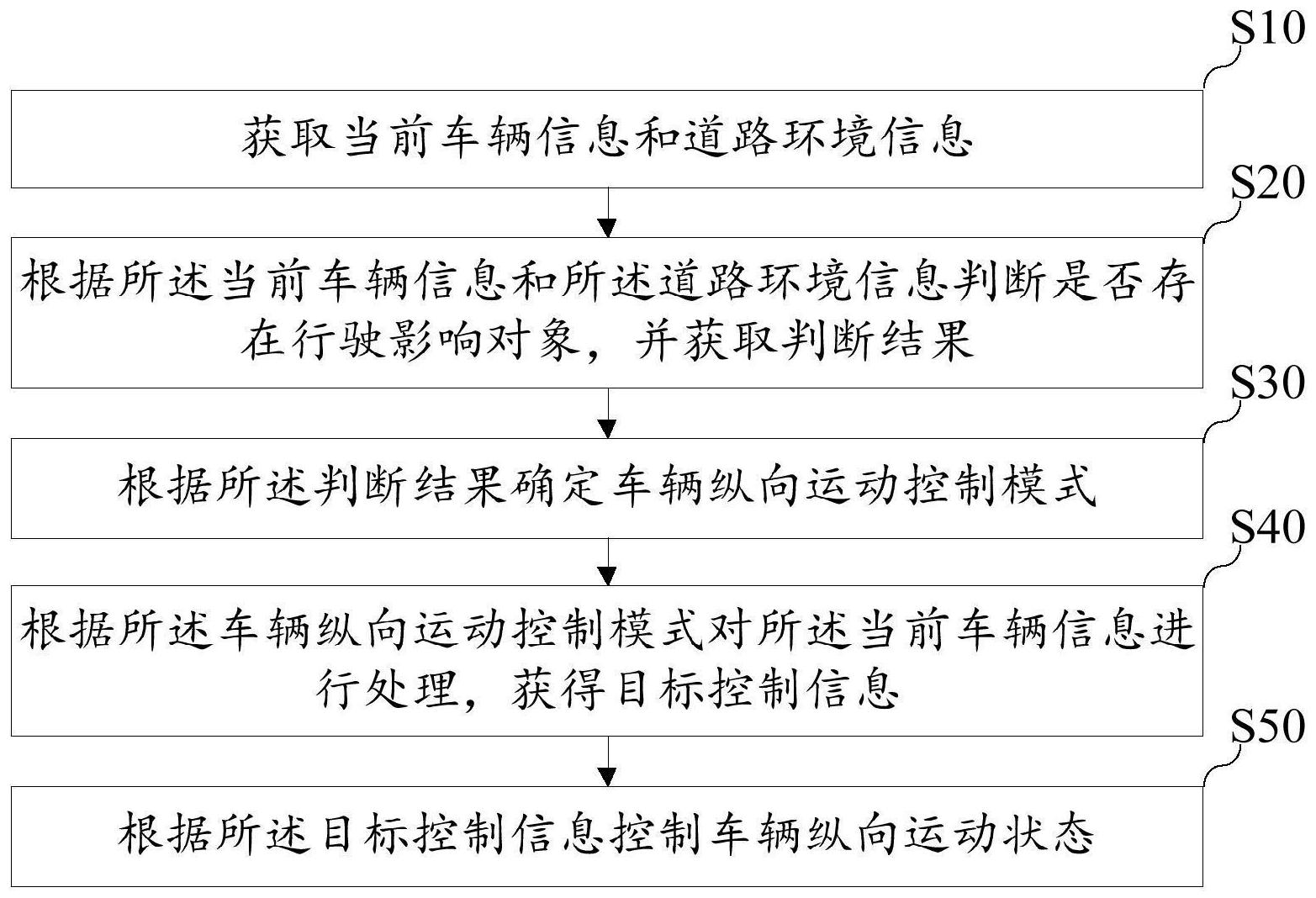
本发明的主要目的在于提供一种车辆纵向运动控制方法、装置、设备及存储介质, 旨在解决如何实现车辆纵向运动控制,从而降低驾驶疲劳的技术问题。 为实现上述目的,本发明提供一种车辆纵向运动控制方法,所述车辆纵向运动控 制方法包括以下步骤: 获取当前车辆信息和道路环境信息; 根据所述当前车辆信息和所述道路环境信息判断是否存在行驶影响对象,并获取 判断结果; 根据所述判断结果确定车辆纵向运动控制模式; 根据所述车辆纵向运动控制模式对所述当前车辆信息进行处理,获得目标控制信 息; 根据所述目标控制信息控制车辆纵向运动状态。 优选地,所述根据所述当前车辆信息和所述道路环境信息判断是否存在行驶影响 对象,并获取判断结果的步骤,包括: 通过低通滤波算法对所述当前车辆信息和所述道路环境信息进行处理,获得第一 车辆环境数据; 对所述第一车辆环境数据进行筛选,获得第二车辆环境数据; 根据所述第二车辆环境数据,通过卡尔曼滤波算法获得车辆环境感知信息; 根据所述车辆环境感知信息判断是否存在行驶影响对象,并获得判断结果。 优选地,所述根据所述第二车辆环境数据,通过卡尔曼滤波算法获得车辆环境感 知信息的步骤之后,还包括: 通过所述低通滤波算法对所述车辆环境感知信息进行处理,获得第三车辆环境数 据; 4 CN 111572560 A 说 明 书 2/13 页 判断所述第二车辆环境数据与所述第三车辆环境数据是否一致; 在所述第二车辆环境数据与所述第三车辆环境数据一致时,执行所述根据所述车 辆环境感知信息判断是否存在行驶影响对象,并获得判断结果的步骤。 优选地,所述判断所述第二车辆环境数据与所述第三车辆环境数据是否一致的步 骤之后,还包括: 在所述第二车辆环境数据与所述第三车辆环境数据不一致时,返回所述通过低通 滤波算法对所述当前车辆信息和所述道路环境信息进行处理,获得第一车辆环境数据的步 骤。 优选地,所述车辆纵向运动控制模式包括距离控制模式和速度控制模式; 所述根据所述判断结果确定车辆纵向运动控制模式的步骤,包括: 在存在所述行驶影响对象时,判定所述车辆纵向运动控制模式为所述距离控制模 式; 在不存在所述行驶影响对象时,判定所述车辆纵向运动控制模式为所述速度控制 模式。 优选地,所述根据所述车辆纵向运动控制模式对所述当前车辆信息进行处理,获 得目标控制信息的步骤,包括: 在所述车辆纵向运动控制模式为所述速度控制模式时,获取车辆初始速度和车辆 目标速度; 根据所述车辆初始速度和所述车辆目标速度计算有效速度偏差; 根据所述有效速度偏差确定闭环牵引力及闭环制动力; 根据所述有效速度偏差和所述当前车辆信息确定开环牵引力及开环制动力; 根据所述闭环牵引力、所述闭环制动力、所述开环牵引力和所述开环制动力计算 目标牵引力及目标制动力; 根据所述目标牵引力和所述目标制动力确定驱动扭矩和制动压力,并将所述驱动 扭矩和所述制动压力作为目标控制信息。 优选地,所述根据所述车辆纵向运动控制模式对所述当前车辆信息进行处理,获 得目标控制信息的步骤,包括: 在所述车辆纵向运动控制模式为所述距离控制模式时,获取当前车辆位置信息及 目标影响对象位置信息; 根据所述当前车辆位置信息和所述目标影响对象位置信息确定安全距离; 获取车辆初始速度和所述安全距离内的车辆目标速度; 根据所述车辆初始速度和所述车辆目标速度计算有效速度偏差; 根据所述有效速度偏差确定闭环牵引力及闭环制动力; 根据所述有效速度偏差和所述车辆信息确定开环牵引力及开环制动力; 根据所述闭环牵引力、所述闭环制动力、所述开环牵引力和所述开环制动力计算 目标牵引力及目标制动力; 根据所述目标牵引力和所述目标制动力确定驱动扭矩、制动压力及目标档位,并 将所述驱动扭矩、所述制动压力和所述目标档位作为目标控制信息。 此外,为实现上述目的,本发明还提出一种车辆纵向运动控制装置,所述车辆纵向 5 CN 111572560 A 说 明 书 3/13 页 运动控制装置包括: 获取模块,用于获取当前车辆信息和道路环境信息; 判断模块,用于根据所述当前车辆和所述道路环境信息判断是否存在行驶影响对 象,并获取判断结果; 确定模块,用于根据所述判断结果确定车辆纵向运动控制模式; 处理模块,用于根据所述车辆纵向运动控制模式对所述当前车辆信息进行处理, 获得目标控制信息; 控制模块,用于根据所述目标控制信息控制车辆纵向运动状态。 此外,为实现上述目的,本发明还提出一种车辆纵向运动控制设备,所述车辆纵向 运动控制设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车 辆纵向运动控制程序,所述车辆纵向运动控制程序被所述处理器执行时实现如上文所述的 车辆纵向运动控制方法的步骤。 此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有车辆 纵向运动控制程序,所述车辆纵向运动控制程序被处理器执行时实现如上文所述的车辆纵 向运动控制方法的步骤。 本发明中,首先获取当前车辆信息和道路环境信息,然后根据所述当前车辆信息 和所述道路环境信息判断是否存在行驶影响对象,并获取判断结果,之后根据所述判断结 果确定车辆纵向运动控制模式,并根据所述车辆纵向运动控制模式对所述当前车辆信息进 行处理,获得目标控制信息,最后根据所述目标控制信息控制车辆纵向运动状态。通过上述 方式,对车辆信息、道路信息以及车辆纵向运动控制模式进行信息处理,并确定目标控制信 息,最后根据所述目标控制信息控制车辆纵向运动状态,在保证驾驶员的安全行驶的同时, 也实现了自动控制车辆的油门、制动及挡位的目的,从而提高了用户体验。 附图说明 图1是本发明实施例方案涉及的硬件运行环境的车辆纵向运动控制设备的结构示 意图; 图2为本发明车辆纵向运动控制方法第一实施例的流程示意图; 图3为本发明车辆纵向运动控制方法第二实施例的流程示意图; 图4为本发明车辆纵向运动控制装置第一实施例的结构框图。 本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











