
技术摘要:
一种居室轮式机器人系统,由机械结构和电控系统组成:机械结构包括移动平台、机身和机械臂;移动平台是轮式移动机构,机身是立式中空前表面上方有穿臂孔的壳体,机械臂是包含多个具有旋转和摆动功能的关节和固定臂的组合;机身立放于移动平台上,机械臂穿过机身前表面的穿 全部
背景技术:
市面上存在的主要类型的机器人有娱乐机器人、服务机器人和工业机器人,它们 主要用于在娱乐、服务、医疗、工业和农业等方面,为人类社会的生活带来了极大的便利,不 仅仅节省了人力,更重要的是节约了时间。 纵观全球的机器人市场,由于全球各地,尤其是发达国家中的出生人口不断减少, 发展中国家的科技进步突飞猛进,导致劳动力成本加大以及对加工产品的品质需求不断的 提升,机器人市场规模显著增加。在众多领域,机器人需要处理的情况会很复杂,而机械手 臂的自由度影响着机器人的动作范围等操作,所以为了使机器人的工作精度更高,多自由 度的机械手臂应运而生,带多自由度机械手臂的机器人更是发展的大趋势。多自由度机械 手臂的结构主要包括肩关节、肘关节以及腕关节。为了实现抓取功能,可以在腕关节处安装 一个负责抓取的机械手。在对机械臂的驱动过程中,主要使电机转动从而控制相关关节的 转动,以此通过将机械手移动到物体附近进行抓取。仅仅控制手臂捡拾物体功能过于单调, 所以出现了许多功能复杂的机械手臂,例如:带移动底盘的抓取机器人和多自由度手臂的 迎宾机器人等。但在其中最重要的部分还是对于机械手臂的控制研究与创新。 将多种技术集成于一体的机器人在很大的程度上实现了“一机多用”,不仅节约了 材料成本,更是为科技的发展增添了新思路。因为它既可用于服务,亦可用于娱乐,所以在 当今社会可以得到广泛的认可。本发明将结合各种技术,提出一种具有机械臂的轮式机器 人,具有功能强,结构合理的特点
技术实现要素:
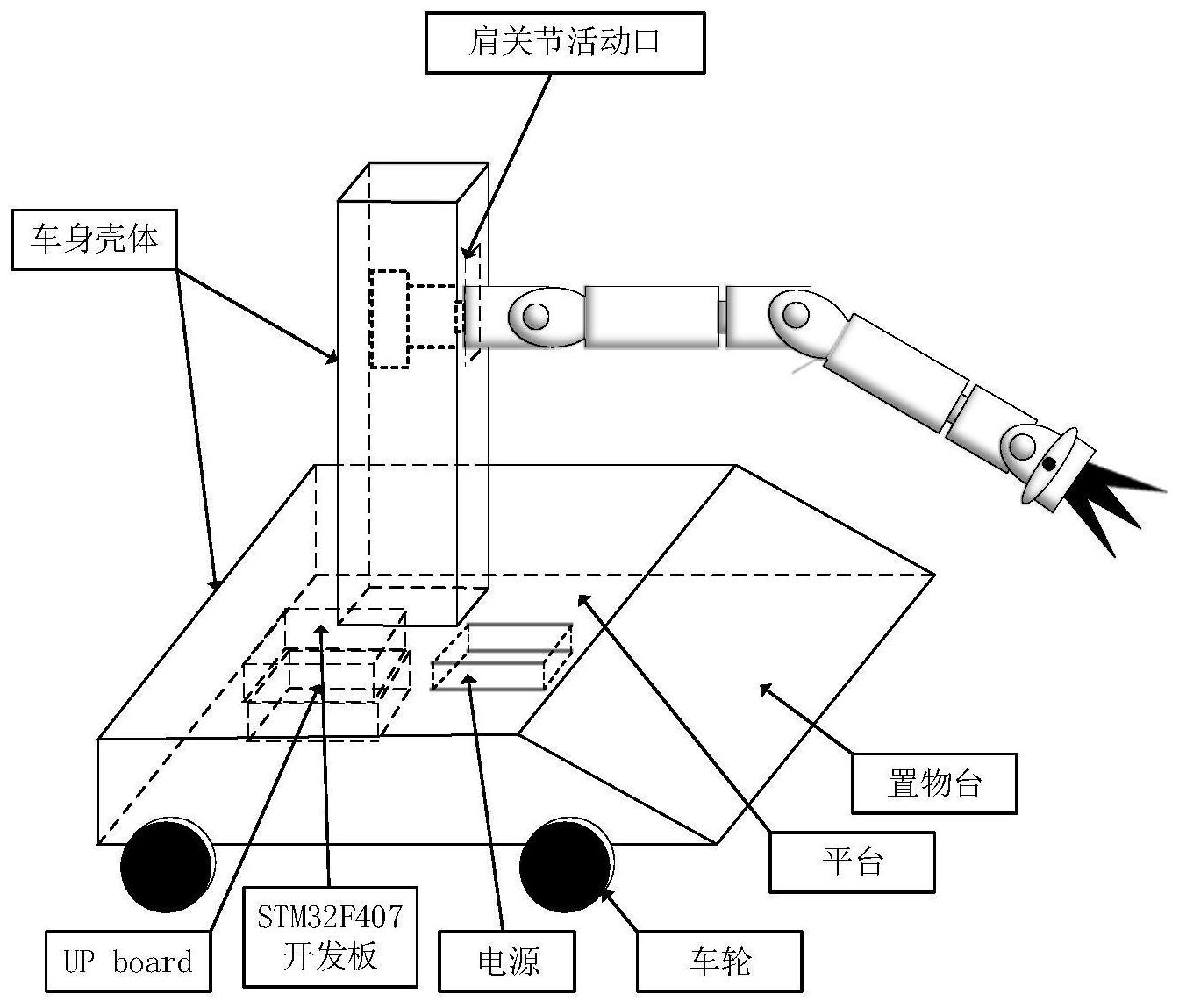
所发明的一种居室轮式机器人系统,由机械结构和电控系统组成:机械结构包括 移动平台、机身和机械臂;移动平台是轮式移动机构,机身是立式中空前表面上方有穿臂孔 的壳体,机械臂是包含多个具有旋转和摆动功能的关节和固定臂的组合;机身立放于移动 平台上,机械臂穿过机身前表面的穿臂孔固定于后表面的内侧;电控系统包括主控电路板、 电机、关节电路板、单轴舵机、双轴舵机和电源;主控电路板安放于移动平台内;电机安装在 移动平台下方,电机轴与移动平台轮相连,电机电源线与电池相连,电机控制线与主控电路 板相连;关节电路板安放在机械臂关节附近里面,专门用于就近关节的控制,与主控电路板 通过CAN总线相连;单轴舵机和双轴舵机都安装在机械臂关节内,舵机轴与关节相连,单轴 舵机驱动轴驱动关节的旋转,双轴舵机驱动关节的摆动;舵机的电源线与电源相连,舵机的 控制线与关节电路板相连;电源给整个电路系统供电;该居室轮式机器人系统的工作原理 是,主控电路板发出控制信号,控制电机,给关节电路板发控制信号,关节电路板控制舵机, 电机驱动移动平台运动,舵机驱动机械臂运动。 所发明的一种居室轮式机器人系统,移动平台的前侧面为向移动平台倾斜的面, 4 CN 111590541 A 说 明 书 2/3 页 以便于机械臂将前方地面物体拿回到移动平台上。 所发明的一种居室轮式机器人系统,机械臂由肩、肘和腕关节组成,每个关节都有 旋转和摆动运动。 所发明的一种居室轮式机器人系统,主控电路板采用带CAN总线接口的单片机开 发板,电动机采用无刷直流电动机,关节电路板也采用带CAN总线接口的单片机开发板,摆 动舵机采用双输出轴舵机,旋转舵机采用单输出轴舵机,电源系统采用带稳压的锂电池系 统;主控电动机通过I/O口与无刷直流电动机的PWM、CW和FG线相连,主控电路板通过CAN总 线与关节电路板相连,关节电路板通过I/O口与舵机的PWM线相连,主控电路板、关节电路板 和舵机的供电线与锂电池系统的5V电源输出相连,无刷直流电动机的供电线与锂电池系统 的12V电源相连。 所发明的一种居室轮式机器人系统,还包括摄像头:摄像头安放于机身前表面的 穿臂孔的上方,摄像头摄像面朝向前方,摄像头数据输出线与主控电路板相连;摄像头用于 取得环境图像信息,为机器人视觉提供基本条件。 所发明的一种居室轮式机器人系统,还包括姿态传感器,安放在各个关节处,传感 信号输出线与主控电路板相连,用于检测和生成机器人的姿态信息。 所发明的一种居室轮式机器人系统,还包括通信模块,安放在主控电路板附近,与 主控电路板相连,用于机器人与外部控制的信息通信,有接受外部信号息并传出机器人系 统状态的功能。 所发明的一种居室轮式机器人系统的优点是:单臂式机械臂配以移动平台前侧面 倾斜的简单抓取结构,CAN的分布式电控结构让连线少且便于扩展,每个关节都用两种舵机 驱动以具备旋转和摆动两种自由度。 附图说明 附图1是本发明所述的居室轮式机器人系统的结构示意图。 附图2是本发明所述的居室轮式机器人系统的俯视结构示意图。 附图3是本发明所述的居室轮式机器人系统的基本电路图。 附图4是本发明所述的居室轮式机器人系统的主控电路板分为两块的基本电路 图。 附图5是本发明所述的居室轮式机器人系统的具体电路图。 附图6是本发明所述的居室轮式机器人系统的主控电路板分为两块的具体电路 图。











