
技术摘要:
本发明公开了一种用于显微外科手术的手持式防颤抖手术机器人,属于手术机器人技术领域,解决了显微外科手术中医生手部生理性颤抖引起的损伤问题。所述手持式机器人包括手术刀具、适配器、动平台、六个驱动单元、手持基座、发光元件等。本发明利用并联平台结构紧凑、刚 全部
背景技术:
在显微外科手术中,尤其是眼科手术中的视网膜静脉血管插管术(一种治疗视网 膜静脉堵塞的新术式)中,医生需要在显微镜的视野下,操作玻璃注射针或显微针穿过巩膜 切口并刺入壁厚25μm、平均直径80μm~120μm的堵塞血管中,并保持2分钟以注射溶解剂。但 是由于眼科医生手部颤抖的平均幅度达到156μm,因此人手难以达到手术操作的精度要求。 而限制手术精度的根本原因在于眼科医生自身的不可避免的生理性手颤的存在,即使是受 过严格训练的操作熟练的外科医生来说,达到这种微米级别的手术都是极其困难的,况且 还要考虑到医生长时间的疲劳等外界因素的影响,实现微米量级手术精度的操作,更是难 上加难。由于眼科手术具有不可恢复性,一旦对患者眼部造成损伤,将会产生无法弥补的后 果。 因此,设计一款用于显微外科手术的手持式微型手术器械,对缓解医生的手术压 力,提升手术效果,突破眼科手术的局限性,具有重要的意义。
技术实现要素:
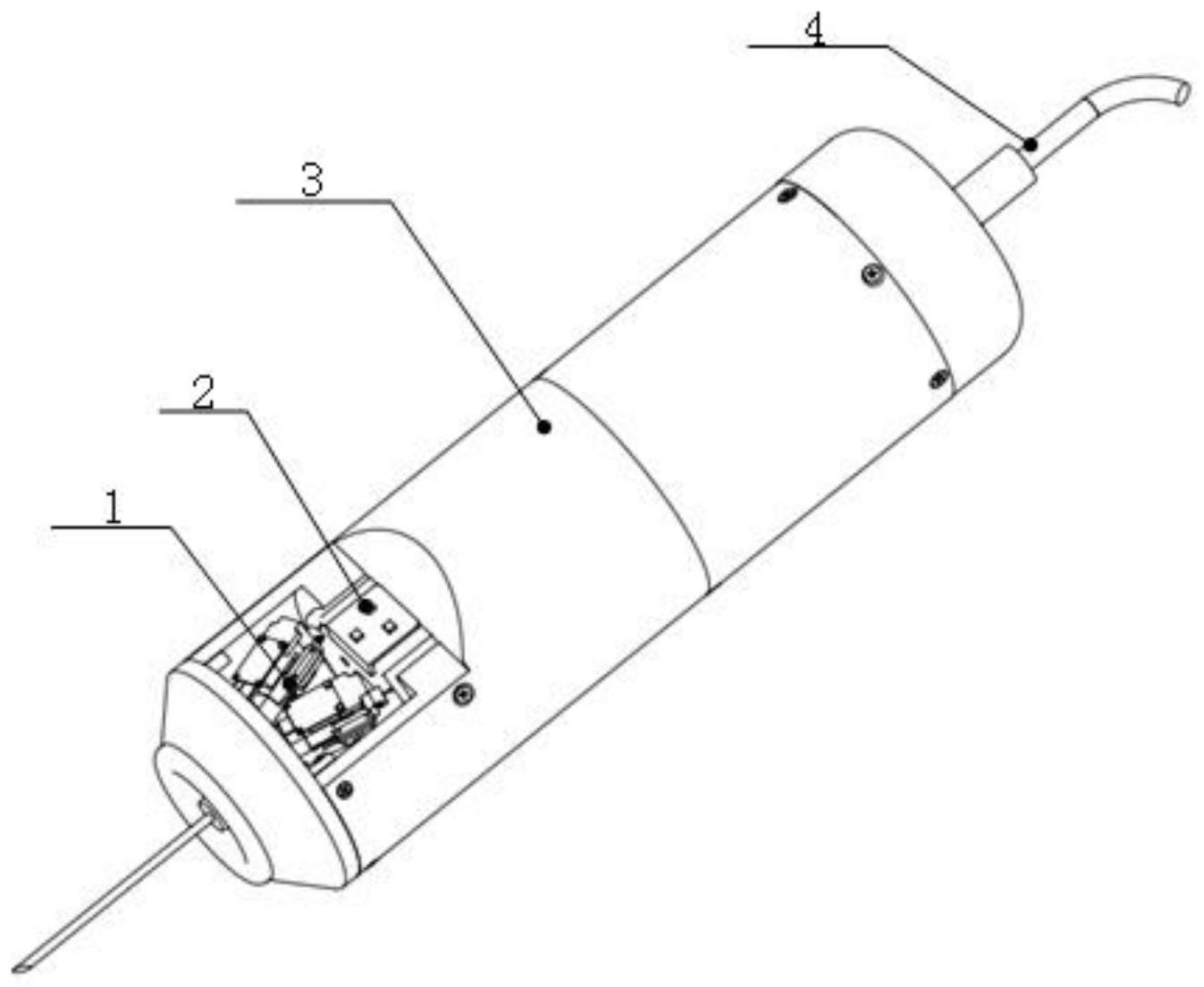
本发明为了解决显微外科手术中医生手部生理性颤抖问题,提供一种紧凑型、高 精度、小尺寸、用于显微外科手术的手持式防颤抖手术机器人。 为了实现上述目的,本发明提供如下技术方案: 一种用于显微外科手术的手持式防颤抖手术机器人,包括: 手握外壳,其前端和后端分别形成有供手术刀具和线缆穿过的通孔; 位于手握外壳内部的手持机器人并联平台,其由前端至后端依次包括手术刀具、 适配器、动平台、镍钛合金丝、多个驱动单元和手持基座,通过多个驱动单元,每个驱动单元 的两端分别通过镍钛合金丝连接动平台和手持基座,动平台通过适配器连接手术刀具; 以及位于手持基座上的发光元件,用于采集医生的手颤信号。 进一步地,所述手持机器人并联平台采用六个相同的驱动单元,形成六自由度并 联机构。 进一步地,每两个驱动单元为一组,每组的两个驱动单元在靠近动平台的一侧距 离较靠近手持基座一侧的距离近,六个驱动单元均匀分布成三组。 进一步地,所述驱动单元包括上壳体和下壳体;所述下壳体内部固定有微型直线 电机和圆柱滑体;所述上壳体和下壳体之间设有滑轨和L型滑块,所述滑轨的一端连接上壳 体,另一端连接下壳体;所述微型直线电机的输出轴两端分别连接圆柱滑体和L型滑块,所 述圆柱滑体通过微型直线电机驱动在下壳体内腔滑动,所述L型滑块通过微型直线电机驱 动在滑轨上滑动。 3 CN 111588462 A 说 明 书 2/4 页 进一步地,所述上壳体位于靠近手持基座的一侧,所述下壳体位于靠近动平台的 一侧。 进一步地,所述圆柱滑体靠近电机的一端形成挡块,圆柱滑体上套接有弹簧,弹簧 的一端压靠在挡块上,弹簧的另一端固定在限位端盖上,限位端盖与下壳体固定连接,用于 防止圆柱滑体脱离下壳体。 进一步地,所述滑轨上套接压缩弹簧,压缩弹簧的一端固定在L型滑块上,另一端 固定在上壳体上。 进一步地,所述上壳体上安装有位置传感器,L型滑块的相对位置上安装有位置感 应片,通过位置传感器和位置感应片的相对位移,来检测电机的运动状态。 进一步地,所述驱动单元两端的镍钛合金丝分别固定连接在上壳体和圆柱滑体 上。 进一步地,所述微型直线电机采用微型压电直线电机 与现有技术相比,本发明的有益效果为: 本发明的用于显微外科手术的手持式防颤抖手术机器人,相比于现有的手持式手 术器械,解决了显微外科手术中医生手部生理性颤抖引起的损伤问题。这种新型手术机器 人采用具有位置传感器的六自由度并联机构,结构更加紧凑,互换性强,精度更高,位置检 测能力更强,能够有效地检测微型压电直线电机的运动状态。同时,利用六自由度并联机构 和滤波器的优势,可以反向补偿眼科医生的不自主的生理性手颤,可以使显微外科手术的 操作水平达到一个新的高度,解决很多当前亟待解决的眼科手术的难题,如白内障超声乳 化吸除术、黏小管手术、视网膜静脉血管插管术、视网膜静脉搭桥术等,缓解医生的手术压 力,有效地提升手术效果。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一 些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。 图1为本发明实施例提供的用于显微外科手术的手持式防颤抖手术机器人的整体 示意图。 图2为本发明实施例提供的手持机器人并联平台的结构示意图。 图3为本发明实施例提供的取液管和旋转手柄的安装示意图。 图4为本发明实施例提供的驱动单元的剖视图。 图5为本发明实施例提供的手术机器人防颤抖控制流程图。 附图标记说明: 1.手持机器人并联平台,1-1.手术刀具,1-2.适配器,1-3.动平台,1-4.镍钛合金 丝,1-5.驱动单元,1-5-1.微型电机,1-5-2.下壳体,1-5-3.上壳体,1-5-4.滑轨,1-5-5.L型 滑块,1-5-6.弹簧,1-5-7.圆柱滑体,1-5-8.压缩弹簧,1-5-9.限位端盖,1-5-10.位置传感 器,1-6.手持基座,2.发光元件,3.手握外壳,4.线缆。 4 CN 111588462 A 说 明 书 3/4 页











