
技术摘要:
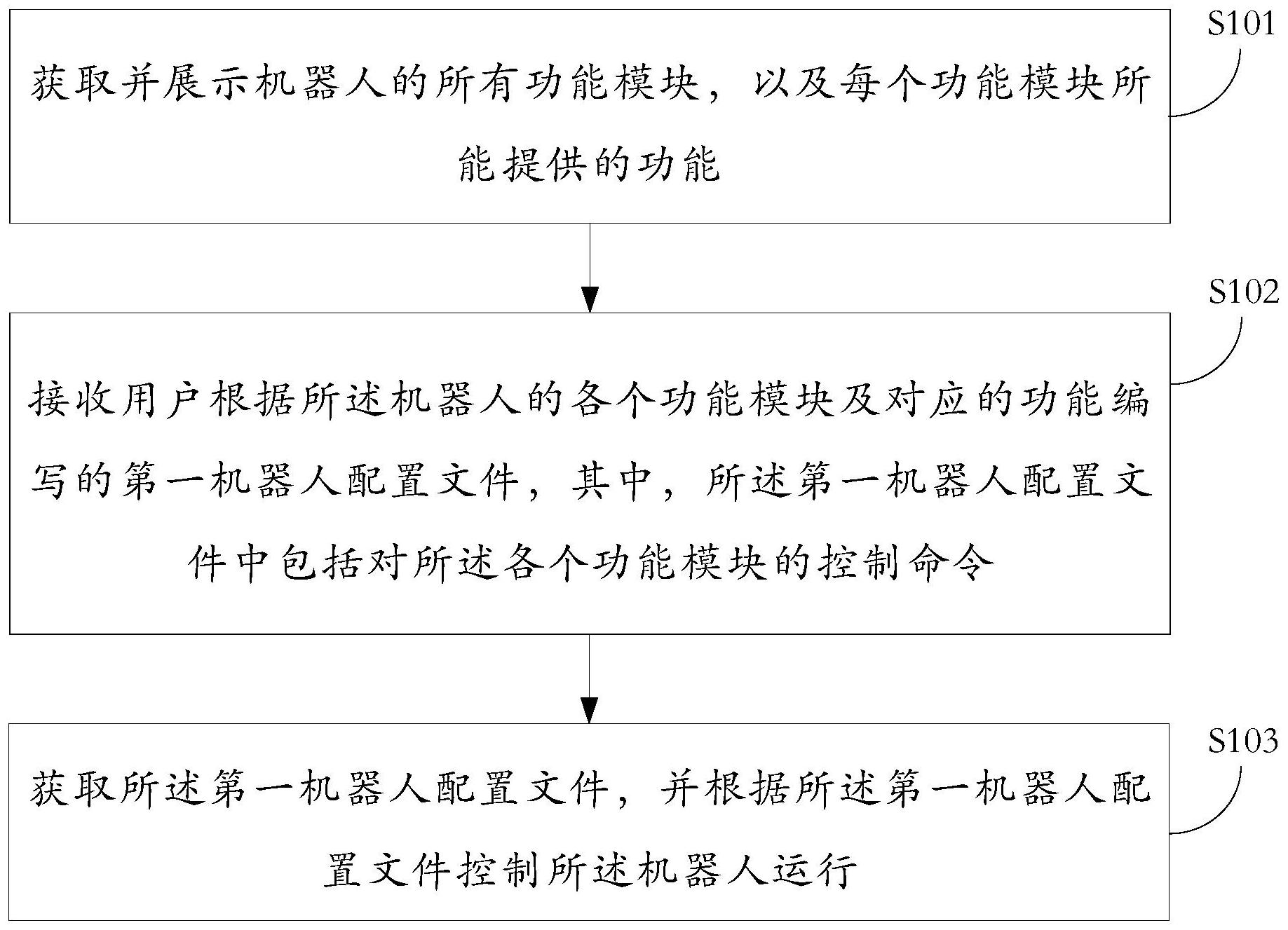
本发明公开了一种机器人控制方法,包括:获取并展示机器人的所有功能模块,以及每个功能模块所能提供的功能;接收用户根据所述机器人的各个功能模块及对应的功能编写的第一机器人配置文件,其中,所述第一机器人配置文件中包括对所述各个功能模块的控制命令;获取所述 全部
背景技术:
机器人系统具有各种复杂的传感器、执行器件以及控制逻辑,对于机器人系统的 控制,一般需要使用编程语言开发各种控制流程以达到特定的控制目的。机器人系统控制 逻辑或者流程的改动都需要改动编程代码,然后重新编译、打包、测试、发布。 上述方案中控制逻辑或者流程的改动都需要改动编程代码,然后重新编译、打包、 测试、发布,涉及到的流程链路较长、流程繁琐、工作量大,对编程代码的频繁改动也容易导 致系统稳定性风险变大。
技术实现要素:
鉴于上述问题,本发明提出了一种机器人控制方法及装置,其机器人系统的控制 以及后续修改都不用编写代码,只需要人工修改配置文件即可实现。 根据本发明实施例的第一方面,提供一种机器人控制方法,包括: 获取并展示机器人的所有功能模块,以及每个功能模块所能提供的功能; 接收用户根据所述机器人的各个功能模块及对应的功能编写的第一机器人配置 文件,其中,所述第一机器人配置文件中包括对所述各个功能模块的控制命令; 获取所述第一机器人配置文件,并根据所述第一机器人配置文件控制所述机器人 运行。 在一个实施例中,优选地,所述方法还包括: 接收用户输入的所述第一机器人配置文件的第一文件名; 根据所述第一文件名,对所述第一机器人配置文件进行存储。 在一个实施例中,优选地,所述方法还包括: 接收所述用户输入的机器人配置文件的添加命令; 根据所述添加命令,获取所述用户编写的第二机器人配置文件和对应的第二文件 名,所述第二机器人配置文件和所述第一机器人配置文件所实现的功能不同; 根据所述第二文件名,对所述第二机器人配置文件进行存储。 在一个实施例中,优选地,所述获取所述第一机器人配置文件,包括: 接收用户输入的对所述第一机器人配置文件的选定命令; 根据所述选定命令,获取所述第一机器人配置文件。 在一个实施例中,优选地,所述方法还包括: 接收所述用户输入的对所述第一机器人配置文件或所述第二机器人配置文件的 修改命令或删除命令; 根据所述修改命令或所述删除命令,修改或删除所述第一机器人配置文件或所述 第二机器人配置文件。 4 CN 111590578 A 说 明 书 2/6 页 根据本发明实施例的第二方面,提供一种机器人控制系统,包括: 第一获取模块,用于获取并展示机器人的所有功能模块,以及每个功能模块所能 提供的功能; 第一接收模块,用于接收用户根据所述机器人的各个功能模块及对应的功能编写 的第一机器人配置文件,其中,所述第一机器人配置文件中包括对所述各个功能模块的控 制命令; 控制模块,用于获取所述第一机器人配置文件,并根据所述第一机器人配置文件 控制所述机器人运行。 在一个实施例中,优选地,所述装置还包括: 第二接收模块,用于接收用户输入的所述第一机器人配置文件的第一文件名; 第一存储模块,用于根据所述第一文件名,对所述第一机器人配置文件进行存储。 在一个实施例中,优选地,所述装置还包括: 第三接收模块,用于接收所述用户输入的机器人配置文件的添加命令; 第二获取模块,用于根据所述添加命令,获取所述用户编写的第二机器人配置文 件和对应的第二文件名,所述第二机器人配置文件和所述第一机器人配置文件所实现的功 能不同; 第二存储模块,用于根据所述第二文件名,对所述第二机器人配置文件进行存储。 在一个实施例中,优选地,所述控制模块包括: 接收单元,用于接收用户输入的对所述第一机器人配置文件的选定命令; 获取模块,用于根据所述选定命令,获取所述第一机器人配置文件。 在一个实施例中,优选地,所述装置还包括: 第四接收模块,用于接收所述用户输入的对所述第一机器人配置文件或所述第二 机器人配置文件的修改命令或删除命令; 处理模块,用于根据所述修改命令或所述删除命令,修改或删除所述第一机器人 配置文件或所述第二机器人配置文件。 本发明实施例中,机器人控制系统通过用户输入的机器人配置文件就可以控制机 器人运行,开发或者操作人员无需重新编写或者修改系统程序,仅需要修改配置文件即可 实现在不同的场景应用。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于 本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附 图。 图1是本发明一个实施例的一种机器人控制方法流程图。 图2是本发明一个实施例的又一种机器人控制方法流程图。 图3是本发明一个实施例的又一种机器人控制方法流程图。 图4是本发明一个实施例的另一种机器人控制方法流程图。 图5是本发明一个实施例的另一种机器人控制方法流程图。 5 CN 111590578 A 说 明 书 3/6 页 图6是本发明一个实施例的一种机器人控制系统的结构框图。 图7是本发明一个实施例的又一种机器人控制系统的结构框图。 图8是本发明一个实施例的再一种机器人控制系统的结构框图。 图9是本发明一个实施例的一种机器人控制系统中控制模块的结构框图。 图10是本发明一个实施例的再一种机器人控制系统的结构框图。 图11是本发明一个实施例的一种机器人控制系统的结构示意图。 图12是本发明一个实施例的另一种机器人控制系统的结构示意图。











