
技术摘要:
本发明公开了一种管道外部泄漏检测机器人行走机构,适用于地下综合管廊等狭小地下空间的管道检测,其特征在于,包括第一壳体(3)和第二壳体(8);且,所述第一壳体(3)和所述第二壳体(8)之间通过若干铰链结构(4)固定连接,并且两者沿所述铰链结构(4)对称,所述第一壳体(3) 全部
背景技术:
地下综合管廊是一种大型的地下隧道空间,将电力、通信、给排水和煤气等管线集 成在同一个管廊中,一旦发生泄漏,可能导致的后果不堪设想。放眼世界,由于受到输送介 质的化学性腐蚀、不可抗力的自然灾害以及自身缺陷的影响,极有可能发生输送物泄漏导 致的如环境污染、易燃物爆炸、能源浪费等严重事故,比如近几年许多国家都出现了管道泄 漏事件,给国家和人民都带来了巨大的损失,所以需要定期对地下综合管廊的管道外部进 行检查,以避免泄漏造成的危害。 传统地检露方式是通过人工检测,人工操作耗时耗力,欲得到准确数值,还需进行 多次测量,效率低下,劳动强度大;且通常存在管道以人力难以去够及的情况;同时人工检 测的方式,在高空或狭窄环境下存在检测风险和检测死角,因此检测效果十分不理想。 而目前,我国对地下综合管廊管道外壁泄漏的智能检测装置的行走机构研究较 少,首先,现有的管道检测行走机构或者机器人基本是进入管道内部的进行检测,并且根据 内部行走的障碍做出创新及改进,比如CN110696014A公开了一种电力管道巡检机器人,机 器人支撑杆、机体底座和弹性连接件形成高度可以变化的三角结构,保证机器人在电力管 道中进行巡检工作时,机体始终能够紧贴在管道里实现机体卡位,不会因为轮胎转速差或 者打滑等因素使机体倾斜。其次,现有的管道检测机器人不能够灵活实现对地下综合管廊 不同管道、不同管径尺寸的检测,另外,对于竖直的管道不能保证紧贴管道壁行走。
技术实现要素:
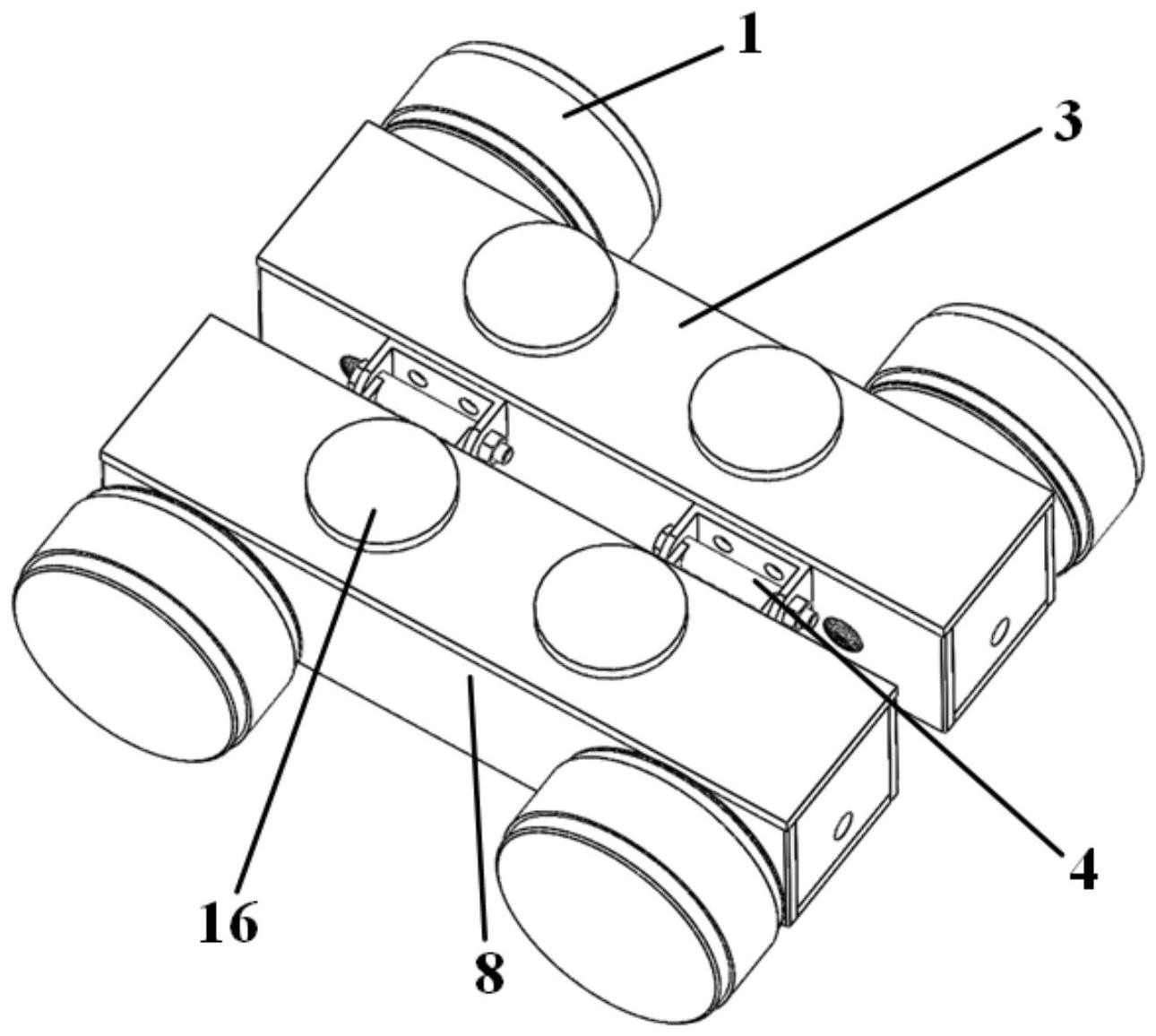
针对现有技术的以上缺陷或改进需求,本发明提供一种管道外部泄漏检测机器人 行走机构,通过壳体顶部设有承载检测机构或传感器装置的预留底座,横向两侧设置的磁 性轮以及内置电机,实现吸附在地下综合管廊金属管道外部并进行行走,进而对管道外部 泄漏智能检测。 为实现上述目的,本发明公开了一种管道外部泄漏检测机器人行走机构,包括第 一壳体和第二壳体;且, 所述第一壳体和所述第二壳体之间通过若干铰链结构固定连接,并且两者沿所述 铰链结构对称,所述第一壳体和所述第二壳体横向两侧还对称设有磁性轮; 所述第一壳体和所述第二壳体顶部分别设有若干承载检测机构或传感器装置的 预留底座,且所述第一壳体和所述第二壳体内各设置有电机,驱动实现吸附在管道外部的 行走机构的走行及检测。 进一步地,所述铰链结构包括第一铰链和第二铰链,其中所述第一铰链与所述第 一壳体固定连接,所述第二铰链与所述第二壳体固定连接。 3 CN 111550683 A 说 明 书 2/4 页 进一步地,所述第一铰链和所述第二铰链部分重叠并设有对应的通孔,用于螺杆 穿过,并通过该螺杆一端的螺母固定。 进一步地,所述第一壳体和所述第二壳体内部分别设有锥齿轮、第二轴承、以及所 述电机,其中所述第二轴承和所述电机之间设有联轴器,所述锥齿轮和第二轴承内设有轴 杆。 进一步地,各磁性轮分别通过车轮轴与第一壳体或第二壳体来连接固定。 进一步地,头部的所述车轮轴一端连接对应的所述磁性轮,另一端穿过链轮、壳 体,所述锥齿轮,并与第一轴承固定连接。 进一步地,尾部的所述车轮轴的一端连接所述磁性轮,另一端穿过链轮、壳体并与 第一轴承固定连接。 进一步地,横向同侧的所述车轮轴之间通过链条连接,实现前后轮同步联动作用。 进一步地,所述磁性轮轮子整体采用铷铁硼强磁铁材料。 进一步地,所述第一壳体和所述第二壳体尾部设置有线缆孔。 进一步地,所述第一壳体和所述第二壳体尾部设有连接装置,可实现多台检测机 器人行走机构连挂成编组,以搭载更多的工作部件。 总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有 益效果: (1)本发明的管道外部泄漏检测机器人行走机构,行走机构本体包括对称的第一 壳体和第二壳体,间通过若干铰链结构固定连接,第一壳体和第二壳体顶部分别设有若干 预留底座,用于承载检测机构或传感器装置。第一壳体和第二壳体横向两侧对称设有磁性 轮,且壳体内置有电机,实现吸附在地下综合管廊的金属管道外部并进行行走,进而对管道 外部泄漏智能检测。 (2)本发明的管道外部泄漏检测机器人行走机构,铰链结构,可通过调整第一铰链 和第二铰链的夹角角度至行走机构两侧轮体完全贴合管道外壁,再通过拧紧螺杆上的螺母 固定行走机构两侧车轮的姿态,以适应不同管径的管道外壁。 (3)本发明的管道外部泄漏检测机器人行走机构,左右壳体内均设置有链条、链轮 结构,实现前后轮的同步驱动,实现整体行走机构的全驱动。 (4)本发明的管道外部泄漏检测机器人行走机构,行走机构本体的左右壳体内各 设置有驱动电机,保证了行走机构整体的驱动力。 (5)本发明的管道外部泄漏检测机器人行走机构,搭载相关检测机构和传感器,对 管道进行泄漏检测作业,解决了传统检测方式劳动强度大,存在检测风险的问题。 附图说明 图1为本发明实施例一种管道外部泄漏检测机器人行走机构整体结构示意图; 图2为本发明实施例一种管道外部泄漏检测机器人行走机构内部结构图; 图3为本发明实施例一种管道外部泄漏检测机器人行走机构爆炸示意图; 图4为本发明实施例一种管道外部泄漏检测机器人行走机构涉及的铰链结构示意 图。 在所有附图中,同样的附图标记表示相同的技术特征,具体为:1-磁性轮、2-橡胶 4 CN 111550683 A 说 明 书 3/4 页 圈、3-右壳体、4-铰链结构、5-车轮轴、6-链条、7-链轮、8-左壳体、9-第一轴承、10-锥齿轮、 11-第一轴承座、12-第二轴承座、13-联轴器、14-电机座、15-电机、16-预留底座;401-第一 铰链;402-第二铰链;403-螺母;404-螺杆。











