
技术摘要:
本申请提供一种无人机控制方法、装置及系统,其中方法包括:UTM确定无人机UAV的控制设备需要切换;UTM向网络设备发送托管命令;以使网络设备根据托管命令,指示UAV需要切换UAV的控制设备;其中,托管命令用于切换UAV的控制设备,托管命令包括:切换UAV的控制设备的指示 全部
背景技术:
随着电子技术和通信技术的迅速发展,UAV相关技术也更加成熟,用户可以通过操 作UAV控制器的方式,在多种不同通信场景下实现对UAV的控制。其中,对于远距离通信场 景,控制器可以通过接入运营商提供的通信网络,通过通信网络控制UAV。 在现有技术中,为了实现对于使用通信网络的UAV及其控制器的监控与识别,相关 的无人机监管机构在通信网络中设置无人机流量管理网元(unmanned aerial vehicle traffic management,UTM),以通过UTM实现对接入通信网络的UAV及其控制器进行监管。 但是现有技术中,没有UTM启用和禁用接入通信网络的UAV与其控制器之间的通信 的可用方案,从而导致UTM无法干预UAV与其控制器间的通信。因此,如何使UTM能够通过通 信网络对接入的UAV及其控制器进行管理,是本领域亟待解决的技术问题。
技术实现要素:
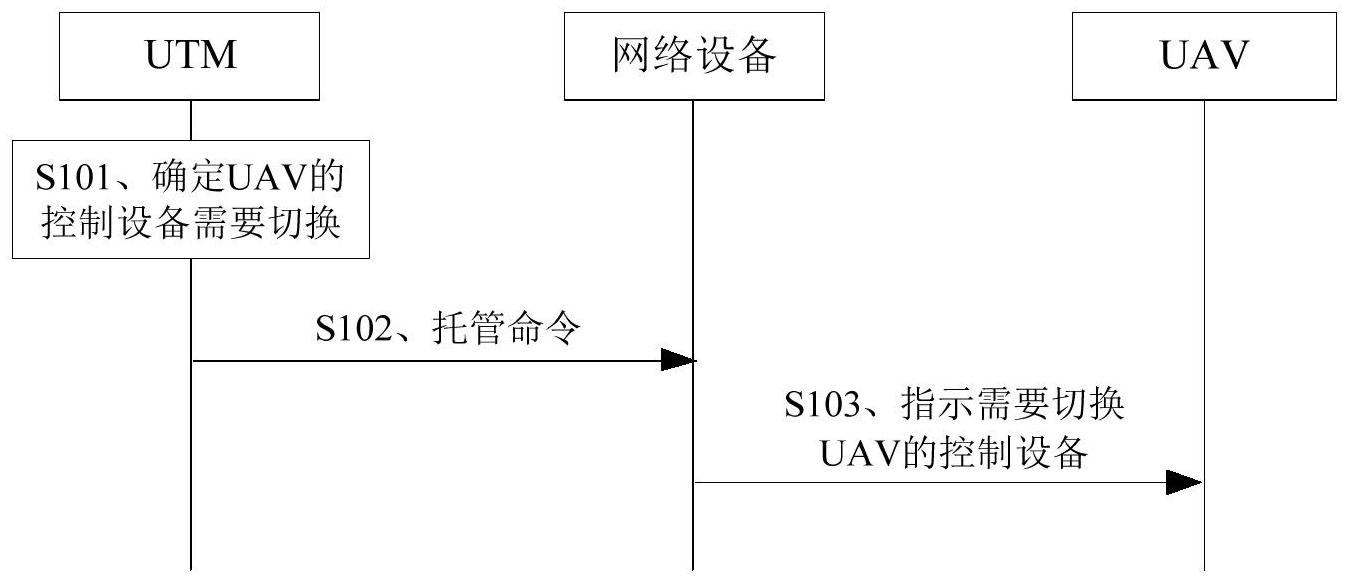
本申请提供一种无人机控制方法、装置及系统,以实现UTM能够通过通信网络对接 入的UAV及其控制器进行管理。 本申请第一方面提供一种无人机控制方法,通过无人机流量管理网元UTM确定UAV 的控制设备需要切换时,向网络设备发送托管命令,使得网络设备能够根据托管命令指示 UAV需要切换UAV的控制设备,通过UTM发起对UAV的控制设备的切换。具体地,本实施例提供 的无人机控制方法,包括: 无人机流量管理网元UTM确定无人机UAV的控制设备需要切换; 所述UTM向网络设备发送托管命令;以使所述网络设备根据所述托管命令,指示所 述UAV需要切换所述UAV的控制设备;其中,所述托管命令用于切换所述UAV的控制设备,所 述托管命令包括:切换所述UAV的控制设备的指示信息和所述UAV的信息。 其中,本实施例提供的UAV控制方法,通过UTM确定UAV的控制设备需要切换时,向 网络设备发送托管命令,以使网络设备根据托管命令指示UAV需要切换UAV的控制设备,从 而实现UAV的控制设备的切换。尤其是UTM可以通过托管命令指示将要切换到的UAV的控制 设备是UTM时,能够实现UTM指示UAV接受UTM的托管,进而明确了UTM对接入通信网络的UAV 的控制,最终实现了UTM能够通过通信网络对接入的UAV进行控制。 在本申请第一方面一实施例中,所述托管命令还包括:将要切换到的所述UAV的控 制设备的信息。 其中,在本实施例提供的UAV控制方法中,托管命令中还包括了UTM确定的将要切 换到的UAV的控制设备的信息,使得UAV的控制设备能够根据托管命令确定将要切换到的 UAV的控制设备的信息后,指示UAV切换到将要切换的UAV的控制设备。而若UTM指示UAV接收 5 CN 111600916 A 说 明 书 2/31 页 UTM的托管时,则托管命令中可以不包括将要切换到的UAV的控制设备的信息,当网络设备 接收到UTM发送的托管命令后,即可指示UAV的控制设备切换为UTM。 在本申请第一方面一实施例中,所述托管命令还包括:将要切换到的所述UAV的控 制设备对应的用户面功能网元的信息;其中,所述将要切换到的所述UAV的控制设备对应的 用户面功能网元的信息用于,所述网络设备确定所述将要切换到的所述UAV的控制设备对 应的用户面功能网元。 其中,本实施例提供的UAV控制方法中,托管命令中还包括了将要切换到的UAV的 控制设备对应的用户面功能网元的信息;从而使得网络设备根据托管命令确定结构化控制 信息后,能够将结构化控制信息发送至所述UAV对应的用户面功能网元。从而丰富了托管命 令能够携带的信息,实现对UAV的控制设备切换时对UAV对应的用户面功能网元的信息进行 修改。 在本申请第一方面一实施例中,所述网络设备为所述UAV对应的会话管理功能网 元。 其中,本实施例应用在例如5G通信系统中时,所述的网络设备为UAV对应的会话管 理功能网元。 在本申请第一方面一实施例中,所述UTM向网络设备发送托管命令,包括:所述UTM 向策略控制功能网元发送所述托管命令,以使所述策略控制功能网元指示所述会话管理功 能网元需要切换所述UAV的控制设备。 其中,本实施例提供的UAV控制方法应用在例如5G通信系统中时,UTM具体在确定 UAV的控制设备需要切换之后,可以通过策略控制功能网元发送托管命令的方式,让策略功 能网元指示会话管理功能网元需要切换UAV的控制设备。 在本申请第一方面一实施例中,所述UTM确定所述UAV的控制设备需要切换之前, 还包括:所述UTM接收来自所述UAV的托管请求消息,所述托管请求消息用于请求切换所述 UAV的控制设备;所述UTM确定所述UAV的控制设备需要切换,包括:所述UTM根据所述托管请 求消息确定所述UAV的控制设备需要切换。 其中,本实施例提供的UAV控制方法,能够根据UAV的请求来对UAV的控制设备进行 切换。例如当UAV可以在确定需要切换其控制设备时,向UTM发送托管请求消息,则UTM接收 到UAV的请求消息后,根据UAV的请求确定UAV的控制设备需要进行切换,并执行后续对UAV 的控制设备进行切换的控制流程。 本申请第二方面提供一种无人机控制方法,通过网络设备在接收到托管命令后, 能够根据托管命令指示UAV需要切换UAV的控制设备,通过UTM发起对UAV的控制设备的切 换。具体地,本实施例提供的无人机控制方法,包括: 网络设备接收托管命令;其中,所述托管命令用于切换无人机UAV的控制设备,所 述托管命令包括:切换所述UAV的控制设备的指示信息和所述UAV的信息; 所述网络设备根据所述托管命令,指示所述UAV需要切换所述UAV的控制设备。 其中,本实施例提供的UAV控制方法,在网络设备接收到托管命令后,网络设备能 够根据托管命令指示UAV需要切换UAV的控制设备,从而实现UAV的控制设备的切换,进而明 确了UAV的控制设备进行切换的方式。 在本申请第二方面一实施例中,所述托管命令还包括:将要切换到的所述UAV的控 6 CN 111600916 A 说 明 书 3/31 页 制设备的信息。 在本申请第二方面一实施例中,所述托管命令还包括:将要切换到的所述UAV的控 制设备对应的用户面功能网元的信息;其中,所述将要切换到的所述UAV的控制设备对应的 用户面功能网元的信息用于,所述网络设备确定所述将要切换到的所述UAV的控制设备对 应的用户面功能网元。 在本申请第二方面一实施例中,所述网络设备根据所述托管命令,指示所述UAV需 要切换所述UAV的控制设备,包括: 所述网络设备根据所述托管命令向所述UAV发送切换命令;所述切换命令用于指 示所述UAV需要切换所述UAV的控制设备。 在本申请第二方面一实施例中,所述切换命令包括:切换所述UAV的控制设备的指 示信息和/或将要切换到的所述UAV的控制设备的信息。 在本申请第二方面一实施例中,所述网络设备接收托管命令之后,还包括: 所述网络设备根据所述托管命令确定结构化控制信息,并将所述结构化控制信息 发送至所述UAV对应的用户面功能网元; 其中,所述结构化控制信息用于:指示将所述UAV对应的用户面功能网元中的检测 规则和/或转发规则中所述UAV的控制设备的信息修改为将要切换到的所述UAV的控制设备 的信息;和/或,指示将所述UAV对应的用户面功能网元中的检测规则和/或转发规则中所述 UAV的控制设备对应的用户面功能网元的信息修改为将要切换到的所述UAV的控制设备的 用户面功能网元的信息。 在本申请第二方面一实施例中,所述网络设备根据所述托管命令,指示所述UAV需 要切换所述UAV的控制设备之后,还包括: 所述网络设备向无人机流量管理网元UTM发送托管命令响应;所述托管命令响应 用于指示已切换所述UAV的控制设备。 本申请第三方面提供一种无人机控制方法,用于包括UTM和网络设备的无人机控 制系统,包括:无人机流量管理网元UTM向网络设备发送托管命令;其中,所述托管命令用于 切换无人机UAV的控制设备,所述托管命令包括:切换控制所述UAV的控制设备的指示信息 和所述UAV的信息; 所述网络设备接收来自所述UTM的所述托管命令,并根据所述托管命令,指示所述 UAV需要切换所述UAV的控制设备。 本申请第四方面提供一种无人机控制方法,通过第一设备接收到指示释放第二设 备对UAV的控制权的释放控制权命令后,发释放第二设备对UAV的控制权。具体地,本实施例 提供的无人机控制方法,包括: 第一设备接收释放控制权命令;其中,所述释放控制权命令用于释放第二设备对 无人机UAV的控制权,所述释放控制权命令包括:释放所述第二设备对所述UAV的控制权的 指示信息和所述UAV的信息; 所述第一设备根据所述释放控制权命令发起释放所述第二设备对所述UAV的控制 权。 综上,本实施例提供的UAV控制方法,当第一设备接收到释放控制权命令,则由第 一设备发起释放第二设备对UAV的控制权,从而实现UAV的控制设备的控制权的释放。因此, 7 CN 111600916 A 说 明 书 4/31 页 本实施例实现了对UAV的控制设备控制权的释放,进而明确了对接入通信网络的UAV的控制 设备的控制。 在本申请第四方面一实施例中,所述释放控制权命令还包括:释放所述第二设备 对所述UAV的控制权的原因和/或第二设备的信息。 其中,在本实施例提供的UAV控制方法中,释放控制权命令中的释放第二设备对 UAV的控制权的原因用于使第一设备确定释放第二设备对UAV的控制权的原因,第二设备的 信息用于第一设备确定具体需要释放对UAV具有控制权的第二设备。 在本申请第四方面一实施例中,所述第一设备根据所述释放控制权命令发起释放 所述第二设备对所述UAV的控制权之后,还包括:所述第一设备向无人机流量管理网元UTM 发送释放控制权命令响应;所述释放控制权命令响应用于指示已释放所述第二设备对所述 UAV的控制权。 在本申请第四方面一实施例中,所述第一设备为所述第二设备对应的会话管理功 能网元; 所述第一设备根据所述释放控制权命令发起释放所述第二设备对所述UAV的控制 权,包括:所述第一设备根据所述释放控制权命令,向所述第二设备发送第一释放命令,所 述第一释放命令用于指示所述第二设备释放对所述UAV的控制权。 其中,本实施例提供的第一设备可以应用在5G通信系统中,具体可以是所述第二 设备对应的会话管理功能网元,并且该会话管理功能网元接收到释放控制权命令后,即通 过向第二设备发送第一释放命令的方式指示第二设备释放对UAV的控制权。从而通过第二 设备的网络侧的会话管理功能网元,实现了对第二设备对UAV的控制权的管理。 在本申请第四方面一实施例中,所述第一设备根据所述释放控制权命令发起释放 所述第二设备对所述UAV的控制权,还包括:所述第一设备根据所述释放控制权命令确定结 构化控制信息,并将所述结构化控制信息发送至所述第二设备对应的用户面功能网元;所 述结构化控制信息用于:指示所述用户面功能网元删除检测规则和/或转发规则中用于所 述第二设备控制所述UAV的信息;和/或所述第一设备根据所述释放控制权命令向所述第二 设备对应的用户面功能网元发送会话释放请求;所述会话释放请求用于:指示所述用户面 功能网元释放用于所述第二设备控制所述UAV的会话上下文。 其中,本实施例提供的UAV控制方法除了向第二设备指示释放对UAV的控制权,还 需要在网络侧修改第二设备控制UAV所需的网络侧资源,并最终当用户面功能网元通过释 放用户面功能网元中第二设备控制UAV所使用的PDU会话后,第二设备无法继续通过该PDU 会话控制UAV,从而实现了释放第二设备对UAV的控制权。 在本申请第四方面一实施例中,所述第一释放命令包括:释放所述第二设备对所 述UAV的控制权的指示信息和所述UAV的信息。 在本申请第四方面一实施例中,所述第一设备为所述第二设备;所述第一设备根 据所述释放控制权命令发起释放所述第二设备对所述UAV的控制权,包括: 所述第二设备根据所述释放控制权命令,向所述第二设备的对应的会话管理功能 网元发送会话管理消息,所述会话管理消息用于指示所述会话管理功能网元修改或释放用 于所述第二设备控制所述UAV的会话上下文。 其中,本实施例提供的第一设备可以为第二设备自身,即,UTM直接向第二设备发 8 CN 111600916 A 说 明 书 5/31 页 送释放该其对UAV的控制权,则当第二设备接收到UTM直接发送的释放控制权命令后,向第 二设备对应的会话管理功能网元发起释放其对UAV的控制权。从而实现了通过第二设备发 起对UAV的控制权的管理。 在本申请第四方面一实施例中,所述第一设备为所述第二设备;所述第一设备根 据所述释放控制权命令发起释放所述第二设备对所述UAV的控制权,包括: 所述第二设备根据所述释放控制权命令,向所述第二设备对应的接入和移动管理 功能网元发送第一去注册消息;所述第一去注册消息用于指示对所述第二设备进行去注 册。 其中,本实施例提供的第一设备也为第二设备自身,则当第二设备接收到UTM直接 发送的释放控制权命令后,若确定第二设备仅用于控制需要释放控制权的UAV,则第二设备 可以在收到释放控制权命令后直接发起去注册流程,通过去注册的方式实现释放其对UAV 的控制权。 在本申请第四方面一实施例中,所述第一设备根据所述释放控制权命令发起释放 所述第二设备对所述UAV的控制权之前,还包括: 所述第二设备向所述UAV发送释放控制权通知消息,所述释放控制权通知消息用 于向所述UAV指示需要释放所述第二设备对所述UAV的控制权; 所述第二设备接收所述UAV发送的释放控制权响应,所述释放控制权响应用于指 示所述UAV已完成切换所述UAV的控制设备。 其中,供了一种UTM向第二设备直接发送释放控制权命令,第二设备除了根据释放 控制权命令发起释放其控制UAV的控制权,还能够向UAV通知第二设备即将释放对UAV的控 制权,进而使得UAV确定第二设备将要释放控制权后,UAV向UTM请求对该UAV进行托管。并且 在随后UAV的控制设备的切换和第二设备对UAV控制权的释放可以同步进行,从而提高了 UTM对UAV及其控制设备的控制效率。 在本申请第四方面一实施例中,所述第一设备为所述第二设备对应的接入和移动 管理功能网元;所述第一设备根据所述释放控制权命令发起释放所述第二设备对所述UAV 的控制权,包括:所述第一设备根据所述释放控制权命令,向所述第二设备发送第二释放命 令,所述第二释放命令用于指示所述第二设备释放对所述UAV的控制权。 其中,本实施例提供的第一设备可以应用在5G通信系统中,具体可以是所述第二 设备对应的接入和移动管理功能网元,并且该接入和移动管理功能网元接收到释放控制权 命令后,即通过向第二设备发送第二释放命令的方式指示第二设备释放对UAV的控制权。从 而通过第二设备的网络侧的接入和移动管理功能网元,实现了对第二设备对UAV的控制权 的管理。 在本申请第四方面一实施例中,所述第二释放命令包括以下的一项或多项:释放 所述第二设备对所述UAV的控制权的指示信息和所述UAV的信息。 在本申请第四方面一实施例中,所述第一设备为所述第二设备对应的接入和移动 管理功能网元;所述第一设备接收释放控制权命令之后,包括: 所述第一设备根据所述释放控制权命令,向所述第二设备发送第二去注册消息, 所述第二去注册消息用于指示对所述第二设备进行去注册。 本申请第五方面提供一种无人机控制方法,通过无人机流量管理网元UTM确定第 9 CN 111600916 A 说 明 书 6/31 页 二设备对UAV的控制权需要释放时,向第一设备发送释放控制权命令,使得第二设备能够根 据命令指示UAV需要切换UAV的控制设备,通过UTM发起对UAV的控制设备的切换。具体地,本 实施例提供的无人机控制方法,包括: 无人机流量管理网元UTM确定第二设备对无人机UAV的控制权需要释放; 所述UTM向第一设备发送所述释放控制权命令;以使所述第一设备根据所述释放 控制权命令发起释放所述第二设备对所述UAV的控制权;其中,所述释放控制权命令用于释 放所述第二设备对所述UAV的控制权,所述释放控制权命令包括:释放所述第二设备对所述 UAV的控制权的指示信息和所述UAV的信息。 综上,本实施例提供的UAV控制方法,在UTM确定第二设备对UAV的控制权需要释放 时,通过UTM向第一设备发送释放控制权命令,并由第一设备发起释放第二设备对UAV的控 制权,从而实现UAV的控制设备的控制权的释放。因此,本实施例实现了UTM对UAV的控制设 备控制权的释放,进而明确了UTM对接入通信网络的UAV的控制设备的控制,最终实现了UTM 能够通过通信网络对接入的UAV的控制设备进行控制。 在本申请第五方面一实施例中,所述释放控制权命令还包括:释放所述第二设备 对所述UAV的控制权的原因。 在本申请第五方面一实施例中,所述第一设备包括:所述第二设备、所述第二设备 对应的会话管理功能网元或者所述第二设备对应的接入和移动管理功能网元。 本申请第六方面提供一种无人机控制方法,用于包括UTM和第一设备的无人机控 制系统,包括:无人机流量管理网元UTM向第一设备发送释放控制权命令;所述释放控制权 命令用于释放第二设备对无人机UAV的控制权,所述释放控制权命令包括:释放所述第二设 备对所述UAV的控制权的指示信息和所述UAV的信息; 所述第一设备接收来自所述UTM的所述释放控制权命令,并根据所述释放控制权 命令发起释放所述第二设备对所述UAV的控制权。 本申请第七方面提供一种无人机控制方法,通过无人机流量管理网元UTM确定赋 予第四设备对UAV的控制权时,向第四设备发送赋予控制权命令,使得第四设备能够根据赋 予控制权命令指示赋予第四设备对UAV的控制权。具体地,本实施例提供的无人机控制方 法,包括: 无人机流量管理网元UTM确定赋予第四设备对UAV的控制权; 所述UTM向第三设备发送赋予控制权命令,其中,赋予控制权命令用于向指示赋予 第四设备对UAV的控制权。赋予控制命令包括:赋予第四设备对UAV的控制权的指示信息、 UAV的信息以及第四设备的信息。 其中,本实施例提供的UAV控制方法,通过UTM向第三设备发送赋予控制权命令,由 第三设备根据赋予控制权命令发起赋予第四设备对UAV的控制权,从而实现赋予新的设备 对UAV的控制权,进而明确了UTM对接入的UAV的控制设备的控制权的赋予,最终实现了UTM 能够通过通信网络对接入的UAV进行控制。 本申请第八方面提供一种无人机控制方法,当第四设备接收到赋予控制权命令 后,能够根据赋予控制权命令指示赋予第四设备对UAV的控制权。具体地,本实施例提供的 无人机控制方法,包括: 第三设备接收无人机流量管理网元UTM发送的赋予控制权命令;其中,赋予控制权 10 CN 111600916 A 说 明 书 7/31 页 命令用于向指示赋予第四设备对UAV的控制权。赋予控制命令包括:赋予第四设备对UAV的 控制权的指示信息、UAV的信息以及第四设备的信息; 所述第三设备根据所述赋予控制权命令,发起赋予第四设备对UAV的控制权。 其中,本实施例提供的UAV控制方法,当第三设备接收到赋予控制权命令,则第三 设备根据赋予控制权命令发起赋予第四设备对UAV的控制权,从而实现赋予新的设备对UAV 的控制权,进而明确了对UAV的控制设备进行切换后,对UAV新的控制设备的控制权赋予过 程。 本申请第九方面提供一种无人机控制方法,用于包括UTM和第三设备的无人机控 制系统,包括: 无人机流量管理网元UTM向第三设备发送赋予控制权命令;其中,赋予控制权命令 用于向指示赋予第四设备对UAV的控制权。赋予控制命令包括:赋予第四设备对UAV的控制 权的指示信息、UAV的信息以及第四设备的信息。 第三设备接收无人机流量管理网元UTM发送的赋予控制权命令,并根据所述赋予 控制权命令,发起赋予第四设备对UAV的控制权 本申请第十方面提供一种无人机控制装置,可用于执行如本申请第一方面所述的 无人机控制方法,该装置可以是UTM,也可以是UTM中的装置,其中,该无人机控制装置包括: 收发模块和处理模块;这些模块可以执行上述第一方面任一实施例中UTM所执行的相应功 能。 示例性地,处理模块用于确定无人机UAV的控制设备需要切换;收发模块用于向网 络设备发送托管命令;以使网络设备根据托管命令,指示UAV需要切换UAV的控制设备;其 中,托管命令用于切换UAV的控制设备,托管命令包括:切换UAV的控制设备的指示信息和 UAV的信息。对于本申请第十方面提供的无人机控制装置所执行的无人机控制方法的具体 实施例,可以参见第一方面中的描述,此处不再具体限定。 本申请第十一方面提供一种无人机控制装置,可用于执行如本申请第二方面所述 的无人机控制方法,该装置可以是网络设备,也可以是网络设备中的装置,其中,该无人机 控制装置包括:收发模块和处理模块;这些模块可以执行上述第二方面任一实施例中网络 设备所执行的相应功能。 示例性地,收发模块用于接收托管命令;其中,托管命令用于切换无人机UAV的控 制设备,托管命令包括:切换UAV的控制设备的指示信息和UAV的信息;处理模块用于根据托 管命令,指示UAV需要切换UAV的控制设备。对于本申请第十一方面提供的无人机控制装置 执行无人机控制方法的具体实施例,可以参见第二方面中的描述,此处不再具体限定。 本申请第十二方面提供一种无人机控制装置,可用于执行如本申请第四方面所述 的无人机控制方法,该装置可以是第一设备,也可以是第一设备中的装置,其中,该无人机 控制装置包括:收发模块和处理模块;这些模块可以执行上述第四方面任一实施例中第一 设备所执行的相应功能。 示例性地,收发模块用于接收释放控制权命令;其中,释放控制权命令用于释放第 二设备对无人机UAV的控制权,释放控制权命令包括:释放第二设备对UAV的控制权的指示 信息和UAV的信息;处理模块用于根据释放控制权命令发起释放第二设备对UAV的控制权。 对于本申请第十二方面提供的无人机控制装置执行无人机控制方法的具体实施例,可以参 11 CN 111600916 A 说 明 书 8/31 页 见第四方面中的描述,此处不再具体限定。 本申请第十三方面提供一种无人机控制装置,可用于执行如本申请第五方面所述 的无人机控制方法,该装置可以是UTM,也可以是UTM中的装置,其中,该无人机控制装置包 括:收发模块和处理模块;这些模块可以执行上述第五方面任一实施例中UTM所执行的相应 功能。 示例性地,处理模块用于确定第二设备对无人机UAV的控制权需要释放;收发模块 用于向第一设备发送释放控制权命令;以使第一设备根据释放控制权命令发起释放第二设 备对UAV的控制权;其中,释放控制权命令用于释放第二设备对UAV的控制权,释放控制权命 令包括:释放第二设备对UAV的控制权的指示信息和UAV的信息。对于本申请第十三方面提 供的无人机控制装置执行无人机控制方法的具体实施例,可以参见第五方面中的描述,此 处不再具体限定。 本申请第十四方面提供一种无人机控制装置,可用于执行如本申请第七方面所述 的无人机控制方法,该装置可以是UTM,也可以是UTM中的装置,其中,该无人机控制装置包 括:收发模块和处理模块;这些模块可以执行上述第七方面任一实施例中UTM所执行的相应 功能。 示例性地,处理模块用于确定赋予第四设备对UAV的控制权;收发模块用于向第三 设备发送赋予控制权命令,其中,赋予控制权命令用于向指示赋予第四设备对UAV的控制 权。赋予控制命令包括:赋予第四设备对UAV的控制权的指示信息、UAV的信息以及第四设备 的信息。对于本申请第十四方面提供的无人机控制装置执行无人机控制方法的具体实施 例,可以参见第七方面中的描述,此处不再具体限定。 本申请第十五方面提供一种无人机控制装置,可用于执行如本申请第八方面所述 的无人机控制方法,其中,该装置可以是第三设备,也可以是第三设备中的装置,该无人机 控制装置包括:收发模块和处理模块;这些模块可以执行上述第八方面任一实施例中第一 设备所执行的相应功能。 示例性地,收发模块用于接收赋予控制权命令,其中,赋予控制权命令用于向指示 赋予第四设备对UAV的控制权。赋予控制命令包括:赋予第四设备对UAV的控制权的指示信 息、UAV的信息以及第四设备的信息;处理模块用于根据赋予控制权命令,发起赋予第四设 备对UAV的控制权。对于本申请第十五方面提供的无人机控制装置执行无人机控制方法的 具体实施例,可以参见第八方面中的描述,此处不再具体限定。 第十六方面,本申请实施例提供了一种无人机控制系统,所述系统包括第十方面 所述的UTM、和第十一方面所述的网络设备。 第十七方面,本申请实施例提供了一种无人机控制系统,所述系统包括第十二方 面所述的第一设备、和第十三方面所述的UTM。 第十八方面,本申请实施例提供了一种无人机控制系统,所述系统包括第十四方 面所述的UTM、和第十五方面所述的第三设备。 本申请第十九方面提供一种通信装置,所述通信装置包括处理器,用于实现上述 第一方面描述的方法中的功能。所述通信装置还可以包括存储器,用于存储程序指令和数 据。所述存储器与所述处理器耦合,所述处理器可以调用并执行所述存储器中存储的程序 指令,用于实现上述第一方面描述的方法的功能。所述通信装置还可以包括通信接口,所述 12 CN 111600916 A 说 明 书 9/31 页 通信接口用于该通信装置与其它设备进行通信,该通信接口可以是收发器。示例性地,处理 器用于确定无人机UAV的控制设备需要切换;并通过收发器向网络设备发送托管命令;以使 所述网络设备根据所述托管命令,指示所述UAV需要切换所述UAV的控制设备;其中,所述托 管命令用于切换所述UAV的控制设备,所述托管命令包括:切换所述UAV的控制设备的指示 信息和所述UAV的信息。对于本申请第十九方面提供的通信装置执行无人机控制方法的具 体实施例,可以参见第一方面中的描述,此处不再具体限定。 本申请第二十方面提供一种通信装置,所述通信装置包括处理器,用于实现上述 第二方面描述的方法中的功能。所述通信装置还可以包括存储器,用于存储程序指令和数 据。所述存储器与所述处理器耦合,所述处理器可以调用并执行所述存储器中存储的程序 指令,用于实现上述第二方面描述的方法的功能。所述通信装置还可以包括通信接口,所述 通信接口用于该通信装置与其它设备进行通信,该通信接口可以是收发器。示例性地,收发 器用于接收托管命令;其中,所述托管命令用于切换无人机UAV的控制设备,所述托管命令 包括:切换所述UAV的控制设备的指示信息和所述UAV的信息;处理器用于根据所述托管命 令,指示所述UAV需要切换所述UAV的控制设备。对于本申请第二十方面提供的通信装置执 行无人机控制方法的具体实施例,可以参见第二方面中的描述,此处不再具体限定。 本申请第二十一方面提供一种通信装置,所述通信装置包括处理器,用于实现上 述第四方面描述的方法中的功能。所述通信装置还可以包括存储器,用于存储程序指令和 数据。所述存储器与所述处理器耦合,所述处理器可以调用并执行所述存储器中存储的程 序指令,用于实现上述第四方面描述的方法的功能。所述通信装置还可以包括通信接口,所 述通信接口用于该通信装置与其它设备进行通信,该通信接口可以是收发器。示例性地,收 发器,用于接收释放控制权命令;其中,释放控制权命令用于释放第二设备对无人机UAV的 控制权,释放控制权命令包括:释放第二设备对UAV的控制权的指示信息和UAV的信息;处理 器,用于根据释放控制权命令发起释放第二设备对UAV的控制权。对于本申请第二十一方面 提供的通信装置执行无人机控制方法的具体实施例,可以参见第四方面中的描述,此处不 再具体限定。 本申请第二十二方面提供一种通信装置,所述通信装置包括处理器,用于实现上 述第五方面描述的方法中的功能。所述通信装置还可以包括存储器,用于存储程序指令和 数据。所述存储器与所述处理器耦合,所述处理器可以调用并执行所述存储器中存储的程 序指令,用于实现上述第五方面描述的方法的功能。所述通信装置还可以包括通信接口,所 述通信接口用于该通信装置与其它设备进行通信,该通信接口可以是收发器。示例性地,处 理器,用于确定第二设备对无人机UAV的控制权需要释放;收发器,用于向第一设备发送释 放控制权命令;以使第一设备根据释放控制权命令发起释放第二设备对UAV的控制权;其 中,释放控制权命令用于释放第二设备对UAV的控制权,释放控制权命令包括:释放第二设 备对UAV的控制权的指示信息和UAV的信息。对于本申请第二十二方面提供的通信装置执行 无人机控制方法的具体实施例,可以参见第五方面中的描述,此处不再具体限定。 本申请第二十三方面提供一种通信装置,所述通信装置包括处理器,用于实现上 述第七方面描述的方法中的功能。所述通信装置还可以包括存储器,用于存储程序指令和 数据。所述存储器与所述处理器耦合,所述处理器可以调用并执行所述存储器中存储的程 序指令,用于实现上述第七方面描述的方法的功能。所述通信装置还可以包括收发器,所述 13 CN 111600916 A 说 明 书 10/31 页 收发器用于该通信装置与其它设备进行通信,该通信接口可以是收发器。示例性地,处理 器,用于确定赋予第四设备对UAV的控制权;收发器,用于向第三设备发送赋予控制权命令, 其中,赋予控制权命令用于向指示赋予第四设备对UAV的控制权。赋予控制命令包括:赋予 第四设备对UAV的控制权的指示信息、UAV的信息以及第四设备的信息。对于本申请第二十 三方面提供的通信装置执行无人机控制方法的具体实施例,可以参见第七方面中的描述, 此处不再具体限定。 本申请第二十四方面提供一种通信装置,所述通信装置包括处理器,用于实现上 述第八方面描述的方法中的功能。所述通信装置还可以包括存储器,用于存储程序指令和 数据。所述存储器与所述处理器耦合,所述处理器可以调用并执行所述存储器中存储的程 序指令,用于实现上述第八方面描述的方法的功能。所述通信装置还可以包括收发器,所述 收发器用于该通信装置与其它设备进行通信,该通信接口可以是收发器。其中,收发器,用 于接收赋予控制权命令,其中,其中,赋予控制权命令用于向指示赋予第四设备对UAV的控 制权。赋予控制命令包括:赋予第四设备对UAV的控制权的指示信息、UAV的信息以及第四设 备的信息;处理器,用于根据赋予控制权命令,发起赋予第四设备对UAV的控制权。对于本申 请第二十四方面提供的通信装置执行无人机控制方法的具体实施例,可以参见第八方面中 的描述,此处不再具体限定。 第二十五方面,本申请实施例中还提供一种计算机可读存储介质,包括指令,当其 在计算机上运行时,使得计算机执行本申请第一方面、第二方面、第三方面、第四方面、第五 方面或者第六方面任一项实施例所述的方法。 附图说明 图1为本申请各实施例应用场景的示意图; 图2为本申请提供的通信网络一实施例的架构示意图; 图3为本申请提供的通信网络一实施例的架构示意图; 图4为本申请提供的通信网络一实施例的架构示意图; 图5为本申请提供的UAV控制方法一实施例的流程示意图; 图6为本申请提供的UAV控制方法一实施例的流程示意图; 图7为本申请提供的UAV控制方法一实施例的流程示意图; 图8为本申请提供的UAV控制方法一实施例的流程示意图; 图9为本申请提供的UAV控制方法一实施例的流程示意图; 图10为本申请提供的UAV控制方法一实施例的流程示意图; 图11为本申请提供的UAV控制方法一实施例的流程示意图; 图12为本申请提供的UAV控制方法一实施例的流程示意图; 图13为本申请提供的UAV控制方法一实施例的流程示意图; 图14为本申请提供的UAV控制装置一实施例的结构示意图; 图15为本申请提供的通信装置一实施例的结构示意图; 图16为本申请提供的UAV控制系统一实施例的结构示意图; 图17为本申请提供的UAV控制系统一实施例的结构示意图; 图18为本申请提供的UAV控制系统一实施例的结构示意图。 14 CN 111600916 A 说 明 书 11/31 页











