
技术摘要:
本发明提供一种证件四角残缺检测方法、装置、设备及存储介质,当接收到包含证件的图片时,获取图片包含的证件中人脸的特征点坐标,基于特征点坐标得到坐标聚类中心与最小外接矩形,并获取最小外接矩形的面积;基于最小外接矩形的面积和坐标聚类中心,计算得到图片中证 全部
背景技术:
随着人工智能的发展,人工智能对证件的分析的场景越来越多。如在基金在线远 程开户或者证件鉴伪或识别过程中,均需要对采集到的证件图像进行完整性分析。若采集 到的证件图像四角有残缺,会对后面的卡片分析,比如文字定位,文字识别等产生不利影 响。因而如何精确地对证件图像进行四角是否残缺检测,也成为一个备受图像研究者关注 的课题。目前判断证件图像四角是否残缺,业内采用的主要方式是采用类似inceptionv3的 神经网络对整张证件图像进行检测。但证件图像在采集过程中可能会误采集到其他物件, 如拍照采集时拍摄到证件所在环境的背景,如此一来,造成了对整张证件图像进行检测的 干扰,使得检测时存在较大误差,导致得出的检测结果不准确。
技术实现要素:
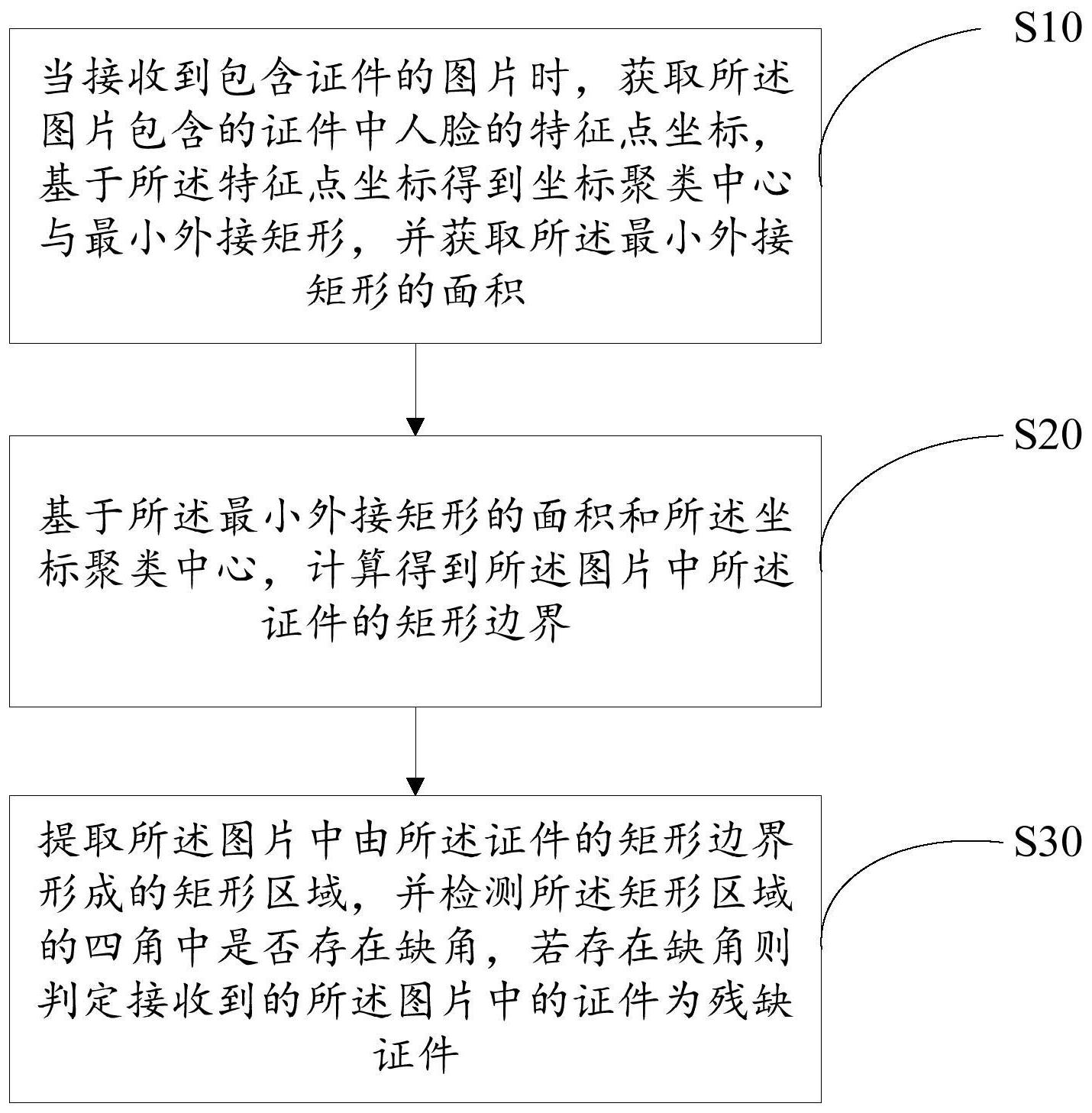
本发明的主要目的在于提供一种证件四角残缺检测方法、装置、设备及存储介质, 旨在解决现有技术中对证件图像是否残缺的检测误差大,检测结果不准确的技术问题。 为实现上述目的,本发明实施例提供一种证件四角残缺检测方法,所述证件四角 残缺检测方法包括以下步骤: 当接收到包含证件的图片时,获取所述图片包含的证件中人脸的特征点坐标,基 于所述特征点坐标得到坐标聚类中心与最小外接矩形,并获取所述最小外接矩形的面积; 基于所述最小外接矩形的面积和所述坐标聚类中心,计算得到所述图片中所述证 件的矩形边界; 提取所述图片中由所述证件的矩形边界形成的矩形区域,并检测所述矩形区域的 四角中是否存在缺角,若存在缺角则判定接收到的所述图片中的证件为残缺证件。 优选地,所述基于所述最小外接矩形的面积和所述坐标聚类中心,计算得到所述 图片中所述证件的矩形边界的步骤包括: 识别所述图片中证件的类型,并根据所述证件的类型确定与所述类型对应的目标 标准证件,获取所述目标标准证件中目标外接矩形的目标标准面积; 基于所述目标标准证件的比例关系与所述最小外接矩形的面积,计算得到所述证 件的长度和宽度,其中所述比例关系包括所述目标标准证件的目标标准长与所述目标标准 面积之间的第一目标比例关系,以及所述目标标准证件的目标标准宽与所述目标标准面积 之间的第二目标比例关系; 基于所述目标标准证件的相对位置关系、所述证件的长度和宽度,以及所述坐标 聚类中心,确定所述证件的矩形边界,其中所述相对位置关系包括所述目标标准证件的目 标标准长与所述目标标准证件的目标聚类中心之间的第一目标相对位置关系,以及所述目 5 CN 111553251 A 说 明 书 2/15 页 标标准证件的目标标准宽与所述目标标准证件的目标聚类中心之间的第二目标相对位置 关系。 优选地,所述基于所述目标标准证件的相对位置关系、所述证件的长度和宽度,以 及所述坐标聚类中心,确定所述证件的矩形边界的步骤包括: 基于所述坐标聚类中心和所述第一目标相对位置关系,确定所述证件在所述图片 中的长度边界方向; 基于所述坐标聚类中心和所述第二目标相对位置关系,确定所述证件在所述图片 中的宽度边界方向; 基于所述证件的长度和所述长度边界方向确定所述证件的长度边界,以及基于所 述证件的宽度和所述宽度边界方向确定所述证件的宽度边界,并由所述长度边界和所述宽 度边界确定所述证件的矩形边界。 优选地,所述提取所述图片中由所述证件的矩形边界形成的矩形区域的步骤之后 包括: 获取所述矩形区域的长度和宽度,并计算与所述矩形区域的长度对应的像素值, 和与所述矩形区域的宽度对应的像素值中是否存在任一项大于预设阈值; 若与所述矩形区域的长度对应的像素值,和与所述矩形区域的宽度对应的像素中 存在任一项大于预设阈值,则将所述矩形区域按照第一预设切分方式切分为多个子图片, 并将多个所述子图片中与所述矩形区域的四角区域对应的子图片作为目标子图片,以基于 各所述目标子图片检测所述矩形区域的四角中是否存在缺角; 若与所述矩形区域的长度对应的像素值,和与所述矩形区域的宽度对应的像素均 小于或等于预设阈值,则将所述矩形区域按照第二预设切分方式切分为多个子图片,并将 多个所述子图片作为目标子图片,以基于各所述目标子图片检测所述矩形区域的四角中是 否存在缺角。 优选地,所述检测所述矩形区域的四角中是否存在缺角,若存在缺角则判定接收 到的所述图片中的证件为残缺证件的步骤包括: 通过预设方式对各所述目标子图片进行逐一检测,确定所述目标子图片是否均包 含有完整的证件角; 若所述目标子图片均包含有完整的证件角,则判定接收的所述图片有效; 若所述目标子图片中存在任意一张所述目标子图像中存在缺角,则确定接收的所 述图片中的证件为残缺证件,判定接收的所述图片无效并输出重新采集的提示信息。 优选地,所述当接收到包含证件的图片时,获取所述图片包含的证件中人脸的特 征点坐标,基于所述特征点坐标得到坐标聚类中心与最小外接矩形,并获取所述最小外接 矩形的面积的步骤包括: 当接收到包含证件的图片时,通过预设神经网络提取所述证件中人脸的多个特征 点,并获取多个所述特征点的特征点坐标; 通过预设算法对所述证件中人脸的各所述特征点坐标进行聚类,得到所述证件中 人脸的各所述特征点坐标的中心坐标,作为坐标聚类中心; 根据所述证件中人脸的各所述特征点坐标所在位置,确定最小外接矩形,并检测 所述最小外接矩形的长和宽,通过所述最小外接矩形的长和宽计算得到所述最小外接矩形 6 CN 111553251 A 说 明 书 3/15 页 的面积。 优选地,所述基于所述最小外接矩形的面积和所述坐标聚类中心,计算得到所述 图片中所述证件的矩形边界的步骤之前包括: 获取各个类型的标准证件的标准面积、标准长、标准宽、标准聚类中心和所述标准 证件中人脸特征点的特征外接矩形的最小标准面积; 针对各个类型的所述标准证件逐一执行以下步骤: 基于所述标准长与所述最小标准面积,生成所述标准长与所述最小标准面积的第 一比例关系,基于所述标准宽与所述最小标准面积,生成所述标准宽与所述最小标准面积 的第二比例关系; 基于所述标准长与所述标准聚类中心,生成所述标准聚类中心与所述标准长的第 一相对位置关系,基于所述标准宽与所述标准聚类中心,生成所述标准聚类中心与所述标 准宽的第二相对位置关系。 为实现上述目的,本发明还提供一种证件四角残缺检测装置,所述证件四角残缺 检测装置包括: 获取模块,用于当接收到包含证件的图片时,获取所述图片包含的证件中人脸的 特征点坐标,基于所述特征点坐标得到坐标聚类中心与最小外接矩形,并获取所述最小外 接矩形的面积; 计算模块,用于基于所述最小外接矩形的面积和所述坐标聚类中心,计算得到所 述图片中所述证件的矩形边界; 提取模块,用于提取所述图片中由所述证件的矩形边界形成的矩形区域,并检测 所述矩形区域的四角中是否存在缺角,若存在缺角则判定接收到的所述图片中的证件为残 缺证件。 进一步地,为实现上述目的,本发明还提供证件四角残缺检测设备,所述证件四角 残缺检测设备包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的证 件四角残缺检测程序,所述证件四角残缺检测程序被所述处理器执行时实现上述的证件四 角残缺检测方法的步骤。 此外,为实现上述目的,本发明还提供一种存储介质,所述存储介质上存储有证件 四角残缺检测程序,所述证件四角残缺检测程序被处理器执行时实现上述的证件四角残缺 检测方法的步骤。 本发明提供一种证件四角残缺检测方法、装置、设备及存储介质,当接收到包含证 件的图片时,获取所述图片包含的证件中人脸的特征点坐标,基于所述特征点坐标得到坐 标聚类中心与最小外接矩形,并获取所述最小外接矩形的面积;基于所述最小外接矩形的 面积和所述坐标聚类中心,计算得到所述图片中所述证件的矩形边界;提取所述图片中由 所述证件的矩形边界形成的矩形区域,并检测所述矩形区域的四角中是否存在缺角,若存 在缺角则判定接收到的所述图片中的证件为残缺证件。本发明通过图片中证件的最小外接 矩形和坐标聚类中心,确定与证件对应的矩形区域,逐一检测矩形区域的四角区域是否缺 角,相对于以整张证件图片为基础进行检测,提高了检测的精确性,实现精确地检测图片中 证件是否残缺。 7 CN 111553251 A 说 明 书 4/15 页 附图说明 图1为本发明实施例方案涉及的硬件运行环境的证件四角残缺检测设备结构示意 图; 图2为本发明证件四角残缺检测方法第一实施例的流程示意图; 图3为本发明证件四角残缺检测装置较佳实施例的功能模块示意图。 本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











