
技术摘要:
本发明涉及一种可平衡自重的下肢康复机器人,主要包括依次连接的带平衡自重装置的髋关节组件、可自锁保护的膝关节组件、可自锁保护的踝关节组件以及手动调长组件和绑腿装置。本发明设计了平衡下肢康复机器人自重的装置,减小了所需的输出扭矩,从而缩小驱动系统的尺寸 全部
背景技术:
下肢康复机器人是为了应对患者的下肢部分的损伤,提供给脊髓损伤、脑瘫患者 或肢体损伤患者手术后,为患者进行有效的下肢康复训练。在患者进行步态行动时,由机器 人的关节活动带动患者的运动,从而激活患者的损伤部分,起到康复治疗的作用。 现有的下肢康复机器人种类繁多,大部分采用外骨骼机器人的机构,外骨骼机器 人由于驱动系统和机械结构的复杂性,使得机器人的尺寸、重量和安全性往往较差,且机器 人自重较大,驱动系统需要驱动自身重量,导致对驱动系统的要求升高,进而使得机器人的 尺寸增大;此外,现有的下肢康复机器人的绑腿大多只能进行绑带长度方向的调节,很少有 能够在工作中进行沿腿方向的纵向调节,以缓解由于运动中绑带对患者拉扯所造成的不适 感;且没有能够绑腿装置相对于机械腿的横向位置,使得下肢康复机器人不能适用于腿直 线度差的患者,例如X型腿或O型腿患者。此外,大部分的绑腿都是固定在机械腿上,不可快 速拆装,医务人员进行操作存在有一定的不便。 综上所述,设计一种尺寸小、安全性高、具有平衡自重装置,且其绑腿装置可进行 工作过程中沿腿方向的调节、垂直于腿方向的横向调节以及快速拆装的下肢康复机器人是 非常重要的,具有一定的实用价值和研究意义。
技术实现要素:
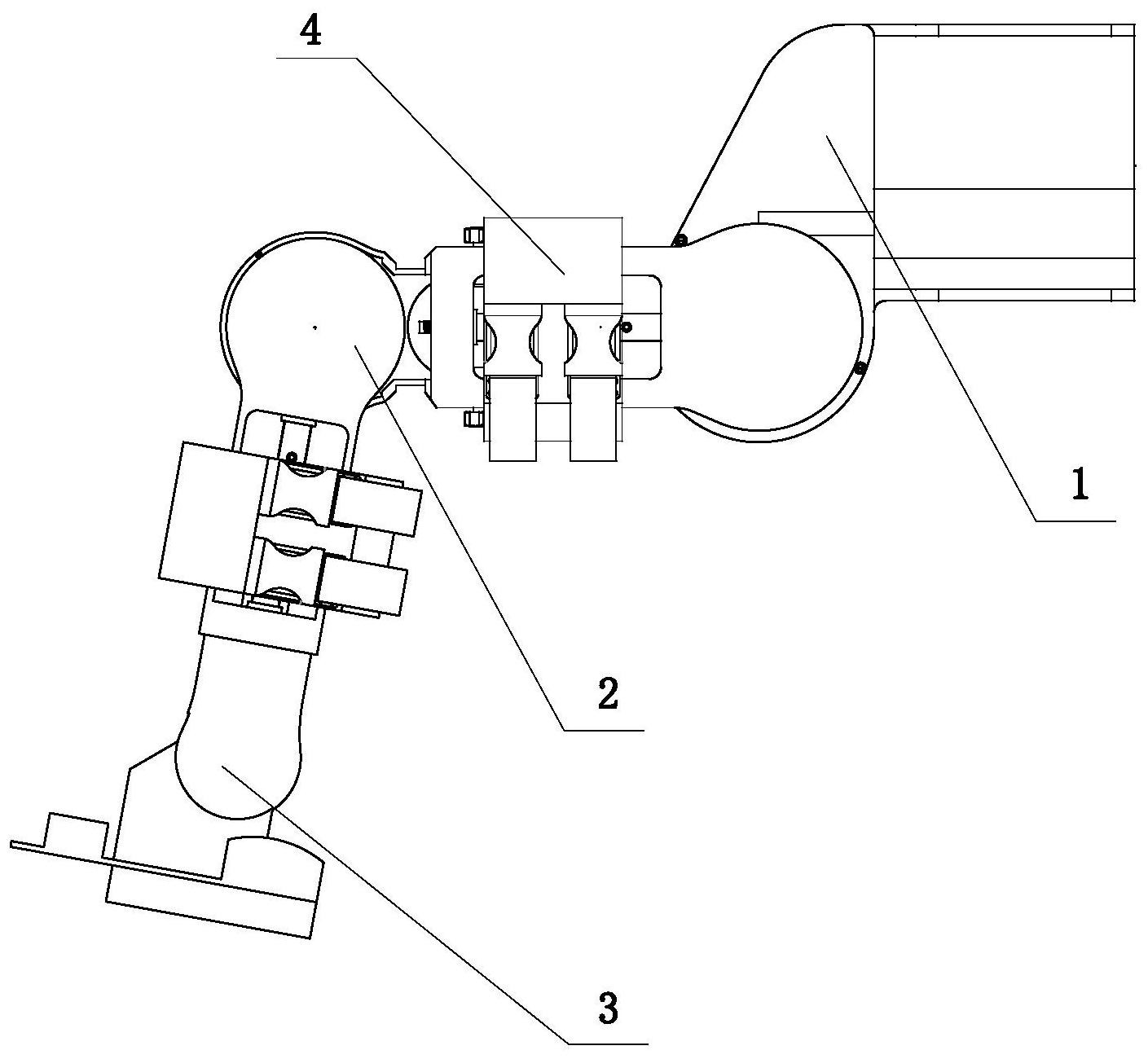
针对现有技术的不足,本发明提供一种可平衡自重的下肢康复机器人,能够对下 肢康复有需求的患者,进行髋、膝和踝关节的康复训练,且适应腿长度不同的患者,更为重 要的是,本发明的下肢康复机器人能够平衡自身的重量、尺寸小、安全性高;此外,本发明的 绑腿装置可进行工作过程中沿腿方向的调节、垂直于腿方向的横向调节以及快速拆装。 具体地,本发明提供一种可平衡自重的下肢康复机器人,其包括带平衡自重装置 的髋关节组件、可自锁保护的膝关节组件、可自锁保护的踝关节组件、绑腿装置和手动调长 组件, 所述带平衡自重装置的髋关节组件包括髋关节安装板、髋关节旋转驱动装置、大 腿上段和平衡自重装置,所述髋关节旋转驱动装置安装于髋关节安装板上,且其输出端与 所述大腿上段固连,所述大腿上段与所述髋关节安装板构成转动副,所述平衡自重装置包 括大压缩弹簧、小压缩弹簧、导向筒、大压缩滑块、小压缩滑块、钢丝绳、导向轮、导向弧槽和 密封鱼嘴,所述导向弧槽固定安装于所述大腿上段的关节圆周处,所述密封鱼嘴安装于所 述导向弧槽内,所述大压缩弹簧的第一端固定安装于所述髋关节安装板上,其第二端与所 述大压缩滑块固连,所述小压缩弹簧的第一端固定安装于导向筒内,其第二端与所述小压 缩滑块固连,所述导向筒固定连接在所述大腿上段,所述钢丝绳的第一端与大压缩滑块固 5 CN 111588587 A 说 明 书 2/8 页 连,经过大压缩弹簧内部,通过导向弧槽和导向轮进行导向,经过小压缩弹簧内部后,其第 二端与小压缩滑块相固连; 所述可自锁保护的膝关节组件包括大腿下段、小腿上段和膝关节旋转驱动装置, 所述大腿下段与所述大腿上段构成移动副,所述膝关节旋转驱动装置固定于所述大腿下 段,且其输出端与所述小腿上段连接; 所述可自锁保护的踝关节组件包括小腿下段、踝关节旋转驱动装置和L型脚踏板, 所述小腿下段与所述小腿上段构成移动副,所述踝关节旋转驱动装置安装于所述小腿下 段,其输出端与所述L型脚踏板连接; 所述绑腿装置包括相互连接在一起的调节机构和快装绑带,所述调节机构包括直 线运动单元、剪叉机构和锁紧机构,所述剪叉机构与所述直线运动单元连接并借助于所述 锁紧机构进行锁紧,所述直线运动单元安装在下肢康复机器人上从而使绑腿装置能够沿腿 方向移动,所述直线运动单元包括直线导轨、滑块和限位装置;所述剪叉机构包括底座、第 一连杆、第二连杆、支撑平台和外壳;所述底座与所述直线运动单元滑动连接,所述底座与 所述直线运动单元接触的侧面设置有滑槽,所述底座借助于滑槽安装成在所述直线运动单 元的滑块上;所述底座的两侧分别设置有一个第一连杆和一个第二连杆,每一侧的第一连 杆和第二连杆交叉且所述第一连杆的中心轴与所述第二连杆的中心轴重合; 两个第一连杆和第二连杆的第一端与所述底座铰接,两个第一连杆和两个第二连 杆的第二端与所述支撑平台连接;所述两个第二连杆的第一端与所述支撑平台铰接,所述 两个第二连杆的第二端与所述底座的滑槽连接;所述锁紧机构包括双向螺杆、螺母和手动 旋钮;所述双向螺杆安装在所述底座的滑槽处,所述双向螺杆的两端分别与所述螺母连接, 所述手动旋钮与所述双向螺杆的一端连接,用于手动驱动所述双螺杆转动,使所述螺母在 双向螺杆上移动,从而压紧两个第一连杆起到锁紧剪叉机构的作用; 通过所述手动调长组件调节所述小腿下段与所述小腿上段间的位移量,能改变小 腿的长度,通过所述手动调长组件调节所述大腿下段与所述大腿上段间的位移量,能改变 大腿的长度。 优选地,所述手动调长组件包括折叠手轮、支座、圆锥齿轮组、输入轴、梯形丝杠、 加高丝母、直线导轨、滑块和导轨锁,所述支座、所述直线导轨均安装于所述大腿下段,所述 滑块与所述导轨锁均安装于所述大腿上段,所述梯形丝杠和所述加高丝母安装于所述支座 上,所述圆锥齿轮组分别安装于所述梯形丝杠和所述输入轴上,所述折叠手轮与所述输入 轴相连,并通过所述圆锥齿轮组将驱动力传递至所述梯形丝杠; 所述手动调长组件安装有位移传感器,用于实时测量大腿和小腿的长度,位移传 感器包括滑块式电阻尺、拉杆式电阻尺和拉绳式电阻尺; 所述手动调长组件安装有小型拖链,以便于在往复直线运动的过程保护电缆。 优选地,所述髋关节旋转驱动装置包括髋关节驱动电机、髋关节减速器、髋关节制 动器、髋关节一级同步带传动装置和髋关节二级同步带传动装置,所述髋关节制动器的轴 线与所述髋关节二级同步带传动的轴线重合,所述髋关节减速器的轴线与所述髋关节一级 同步带传动的轴线重合,所述髋关节驱动电机通过两级同步带传动装置将运动分别传递至 所述髋关节减速器和所述髋关节制动器。 优选地,所述膝关节旋转驱动装置包括膝关节驱动电机、膝关节减速器、膝关节隔 6 CN 111588587 A 说 明 书 3/8 页 板、膝关节制动器、膝关节中空轴和膝关节同步带传动,所述膝关节驱动电机与所述膝关节 隔板安装于所述大腿下段上,所述膝关节制动器的第一端安装于所述膝关节隔板上,所述 膝关节制动器的第二端与同步带轮相连,所述膝关节减速器第一端固定安装在膝关节隔板 上,第二端与所述小腿上段相连,所述膝关节驱动电机的运动通过所述膝关节同步带、所述 膝关节中空轴传动传递至所述膝关节减速器的输入端。 优选地,所述踝关节旋转驱动装置的结构与所述膝关节旋转驱动装置的结构完全 相同;所述膝关节中空轴的轴线、所述膝关节制动器的轴线、所述膝关节减速器的轴线相互 重合。 优选地,所述髋关节安装板内外两侧设有髋关节内盖和髋关节外壳,且所述大腿 上段、大腿下段、小腿上段和小腿下段分别设有大腿上段外壳、大腿下段外壳、小腿上段外 壳和小腿下段外壳,起防护作用; 所述髋关节减速器、所述膝关节减速器和所述踝关节减速器为谐波减速器或RV减 速器,且为中空型号;所述膝关节制动器和所述踝关节制动器为电磁制动器,且为中空型 号,方便电缆穿过;所述髋关节驱动电机、所述膝关节驱动电机和所述踝关节驱动电机为盘 式电机,且电机内置电感式增量编码器。 优选地,在所述绑腿装置中,所述第一连杆与所述第二连杆的两端借助于方形螺 母分别与所述底座和支撑平台连接;所述直线运动单元为滑动凹槽或滑动光轴,所述直线 运动单元的滑块为宽幅型滑块;所述剪叉机构的底座和支撑平台均为U型,当所述剪叉机构 在最低位置时,底座与支撑平台完全重合,从而能够减小整个装置的高度;所述支撑平台与 所述剪叉机构连接的一侧设置有滑槽,且所述底座与支撑平台的滑槽一端具有方便锁紧机 构的方形螺母安装的圆窝;所述底座的外部设置有塑料的保护外壳。 优选地,所述快装绑带包括快装插销、快装凹槽、绑带和调长卡扣,所述快速插销 与剪叉机构的支撑平台相连接,所述快装凹槽与所述绑带相连接,通过调节机构的沿腿移 动进行快速拆装;所述绑带通过所述调长卡扣进行长度的调节,以改变绑带长度适应不同 粗细的人腿。 优选地,所述快装绑带包括特种板簧、安装盒、绑带安装板、绑带和调长卡扣,所述 板簧安装盒与剪叉机构的支撑平台相连接,所述特种板簧安装在安装盒内,所述绑带安装 板与绑带连接,通过特种板簧的外置手柄控制绑带的快速拆装。 一种基于可平衡自重的下肢康复机器人的使用方法,其包括以下步骤: S1、医护工作人员将所述快装绑带与患者的大腿和小腿连接,利用调长卡扣调整 绑带的长度,以保证能够固定患者腿部且松紧程度合适;将患者移动到康复机器人处,手动 调节大腿和小腿处的导轨锁旋钮解锁手动调长组件,利用折叠手轮将下肢康复机器人的大 腿和小腿调整到适合患者的长度,调节导轨锁旋钮锁定手动调长组件; S2、医护人员转动绑腿装置锁紧机构的手动旋钮解锁剪叉机构,且将其移动至快 装绑带合适安装的位置并进行快速安装,转动锁紧机构的手动旋钮锁定剪叉机构,将患者 脚步与所述L型脚踏板连接,可平衡自重的下肢康复机器人开始工作; S3、在工作过程中,绑腿装置由于具有直线运动单元可进行纵向调节,缓解绑带的 拉扯或挤压对患者造成的不舒适感,且所述平衡自重装置自动平衡机器人自重所产生的扭 矩; 7 CN 111588587 A 说 明 书 4/8 页 S4、康复训练结束后,拆卸快装绑带,转动锁紧机构的手动旋钮将剪叉机构调回到 原位置,将患者移开康复机器人并拆除绑带,将下肢康复机器人的大小腿长度调节到最短 状态,以节约占地面积 与现有技术相比,本发明的有益效果为: (1)本发明的一种可平衡自重的下肢康复机器人具有平衡自身重量的装置,减小 了所需驱动系统的转矩要求,从而缩小机器人的整体尺寸,且旋转驱动装置采用盘式电机 和谐波减速器,机器人的工作噪声低,更能满足医疗设备的标准。 (2)本发明的一种可平衡自重的下肢康复机器人,其结构精巧、尺寸小,能满足下 肢损伤患者的康复训练,机器人外部包装有安全防护性优良的外壳,且其髋关节、膝关节和 踝关节都具有断电自锁功能,使康复机器人的工作安全性更高; (3)本发明的一种可平衡自重的下肢康复机器人,其具有功能多样的绑腿装置,其 可进行工作过程中沿腿方向的调节、以提高患者的舒适感;可进行垂直于腿方向的横向调 节,以适应腿直线度差的患者,如X型腿或O型腿的患者;可进行快速拆装,以提高工作人员 和患者的便利性。 附图说明 图1为本发明的下肢康复机器人内侧面示意图; 图2为本发明的下肢康复机器人外侧面示意图; 图3为本发明的带平衡自重装置的髋关节组件示意图; 图4为本发明的髋关节旋转驱动装置的内外侧结构示意图; 图5为本发明的膝关节组件和踝关节组件示意图; 图6为本发明的膝关节旋转驱动装置结构分解图; 图7为本发明的大腿处的手动调长结构示意图; 图8为本发明的绑腿装置结构示意图; 图9为本发明的剪叉机构和直线运动单元结构示意图; 图10为本发明的绑腿装置的第二种工作状态示意图; 图11为本发明的锁紧机构工作原理示意图; 图12为本发明的快装绑带的具体实施例一的示意图;以及 图13为本发明的快装绑带的具体实施例二的分解示意图; 附图标记: 1-带平衡自重装置的髋关节组件;2-可自锁保护的膝关节组件;3-可自锁保护的 踝关节组件;4-手动调长组件;5-绑腿装置; 101-髋关节安装板;102-髋关节外壳;103-髋关节内盖;104-髋关节旋转驱动装 置;105-大腿上段;106-大压缩弹簧系统;107-导向弧槽;108-密封鱼嘴;109-小压缩弹簧系 统; 1041-髋关节驱动电机;1042-髋关节制动器;1043-髋关节减速器;1044-髋关节一 级同步带传动;1045-髋关节二级同步带传动; 201-大腿下段;202-大腿下段外壳;203-膝关节旋转驱动装置;204-小腿上段; 205-小腿上段外壳; 8 CN 111588587 A 说 明 书 5/8 页 301-小腿下段;302-小腿下段外壳;303-踝关节旋转驱动装置;304-L型脚踏板; 2031-膝关节驱动电机;2032-膝关节减速器;2033-膝关节隔板;2034-膝关节制动 器;2035-膝关节中空轴;2036-膝关节同步带传动; 401-折叠手轮;402-支座;403-直线导轨;404-滑块;405-梯形丝杠;406-导轨锁; 407-加高丝母;408-电阻尺; 501-快装绑带;502-剪叉机构;503-锁紧机构;504-直线移动单元; 5021-底座;5022-第一连杆;5023-第二连杆;5024-支撑平台;5025-塑料外壳; 5031-手动旋钮;5032方螺母;5033-双向螺杆; 5041-直线导轨;5042-宽幅型滑块;5043-限位块; 5011-快装插销;5012-快装凹槽;5013-绑带;5014-调长卡扣;5015-安装盒;5016- 特种板簧;5017-绑带安装板。











