
技术摘要:
本发明提出了一种基于自由曲面的工业机器人全面覆盖路径快速生成方法,包括:对位置式机器人视觉系统进行标定,确定采集数据与真实场景三维工件的坐标转换关系;基于立体视觉摄像头对工件表面的自由曲面进行三维重建,获取该自由曲面的点云数据;沿与y轴平行的方向对工 全部
背景技术:
工业场合中经常需要在不规则三维工件表面进行机器人自动涂胶操作,以制鞋行 业为例,由于鞋底款式和鞋码不同,经常需要变换机器人的工作路径以使得鞋底能够均匀 涂胶。 传统的工业机器人路径规划过程通常需要进行人工示教,或者在商用软件中进行 离线编程以针对每款产品的表面形貌进行分析,并规划工业机器人路径。这种方法费时、费 力,且人工示教过程存在不确定性,生成的路径不够准确;离线编程方式需要获得产品表面 形貌的三维几何模型,同时需要进行轨迹规划并进行虚拟-现实标定,该标定过程会产生标 定误差,进而影响到机器人路径生成的精确度。以人工示教方式为例,由于缺乏参考标准, 人工操作机器人涂胶的示教过程会存在较多重复涂胶或者未涂到胶的区域,进而影响产品 的粘合质量。 同时,由于人工示教方法缺乏准备的数据支撑,因此人工示教的路径存在随机性, 在自由曲面曲率变化较大的区域,路径点数量不够多,容易造成该区域涂胶过厚或过薄。在 两条路径之间,由于曲面曲率变化,无法确保L值的固定,因此造成两条路径之间产生重复 涂胶或漏涂胶现象,影响产品质量。
技术实现要素:
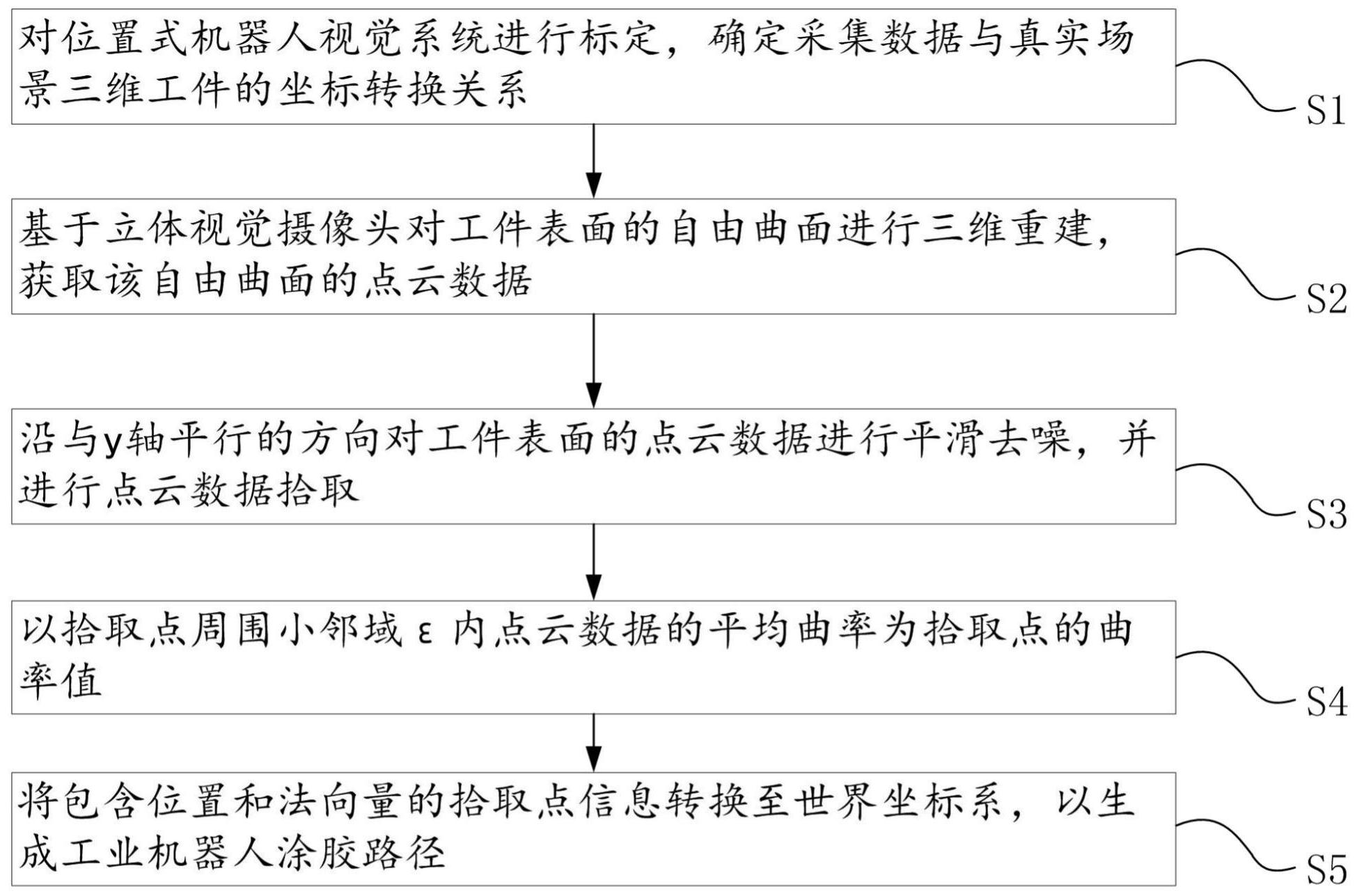
本发明提供了一种基于自由曲面的工业机器人全面覆盖路径快速生成方法,包 括: 对位置式机器人视觉系统进行标定,确定采集数据与真实场景三维工件的坐标转 换关系; 基于立体视觉摄像头对工件表面的自由曲面进行三维重建,获取该自由曲面的点 云数据; 沿与y轴平行的方向对工件表面的点云数据进行平滑去噪,并进行点云数据拾取; 以拾取点周围小邻域ε内点云数据的平均曲率为拾取点的曲率值np;以及 将包含位置和法向量的拾取点信息转换至世界坐标系,以生成工业机器人涂胶路 径。 其中,所述步骤S1中,采用以下公式计算得到点云数据在世界坐标系中的位置:其 中(x,y,z)为世界坐标系中的一个点,(u,v,λ)为该点对应的点云数据坐标,采用旋转矩阵 可得到点云数据在世界坐标系中的位置如下: 4 CN 111546337 A 说 明 书 2/5 页 其中,r11,r12,r13,r31,r32,r33为旋转矩阵中的行和列元素,t1,t2,t3是从相机到自 由曲面的旋转矩阵元素。 其中,所述步骤S3中,采用等误差的尖锐特征识别算法进行点云数据拾取。 其中,所述步骤S4中,点云数据p的曲率np取邻域内所有i个点的平均曲率,其计算 公式如下所示: 其中k为领域内的点的数目,ni为点云数据p邻域内点的曲率。 本发明还提供了一种基于自由曲面的工业机器人全面覆盖路径快速生成系统.包 括: 坐标转换模块,用于对位置式机器人视觉系统进行标定,以确定采集数据与真实 场景三维工件的坐标转换关系; 点云数据获取模块,用于对工件表面的自由曲面进行三维重建,以获取该自由曲 面的点云数据; 点云数据拾取模块,用于对工件表面的点云数据进行平滑去噪,并采用等误差的 尖锐特征识别算法进行点云数据拾取; 拾取点曲率值计算模块,用于以拾取点周围小邻域ε内点云数据的平均曲率为拾 取点的曲率值np;以及 路径生成模块,用于将包含位置和法向量的拾取点信息转换至世界坐标系,以生 成工业机器人涂胶路径。 其中,所述坐标转换模块通过采用以下公式计算得到点云数据在世界坐标系中的 位置:其中(x,y,z)为世界坐标系中的一个点,(u,v,λ)为该点对应的点云数据坐标,采用旋 转矩阵可得到点云数据在世界坐标系中的位置如下: 其中,r11,r12,r13,r31,r32,r33为旋转矩阵中的行和列元素,t1,t2,t3是从相机到自 由曲面的旋转矩阵元素。 上述基于自由曲面的工业机器人全面覆盖路径快速生成方法及系统采用结构光 立体视觉对自由曲面进行扫掠,设数据采集距离间隔为L,使用立体相机提取自由曲面上各 x轴方向上的点云数据,并根据点云数据与周围小邻域内的平均曲率来计算该点云数据的 5 CN 111546337 A 说 明 书 3/5 页 曲率,基于等误差方法的点云数据删减算法采集点云尖锐特征,过滤点云数据,并依据点云 数据的位置和曲率信息生成工业机器人路径。 附图说明 图1为本发明基于自由曲面的工业机器人全面覆盖路径快速生成方法的较佳实施 方式的流程图。 图2为采用等误差方法原理令各节点间曲线与逼近线段的误差相等的曲线示意 图。 图3为图1中步骤S4的示意图。 图4为本发明基于自由曲面的工业机器人全面覆盖路径快速生成系统的较佳实施 方式的方框图。











