
技术摘要:
本申请公开了一种微小目标的位姿获取方法、系统、装置和介质,该方法包括:获取微小目标在任一时刻的运动图像;处理所述运动图像,获取与所述微小目标对应的目标位姿信息;利用所述目标位姿信息获取所述微小目标在下一时刻的运动图像。实现了运动过程中的微小目标的位 全部
背景技术:
利用激光烧蚀驱动移除空间碎片是空间碎片移除领域中常用的技术手段,在利用 该技术进行空间碎片移除过程中,实时获取烧蚀过程中微小目标在多自由度下的运动状态 变化,是研究激光烧蚀驱动过程、优化驱动策略和提高激光烧蚀驱动精度的前提条件。 在相关技术中,在制定微小目标移除策略之前,通常要进行地面试验检验微小目 标清除策略的有效性,地面试验通常是在导轨或扭摆等单自由度下,测量试验用微小目标 在特定方向或者位置上的运动状态信息,在该过程中,获取的微小目标的位姿信息较少,无 法全面反映激光烧蚀驱动的力学效果,不能有效获得检验驱动策略的真实效果,激光烧蚀 驱动精度因没有有效反馈无法精确控制。
技术实现要素:
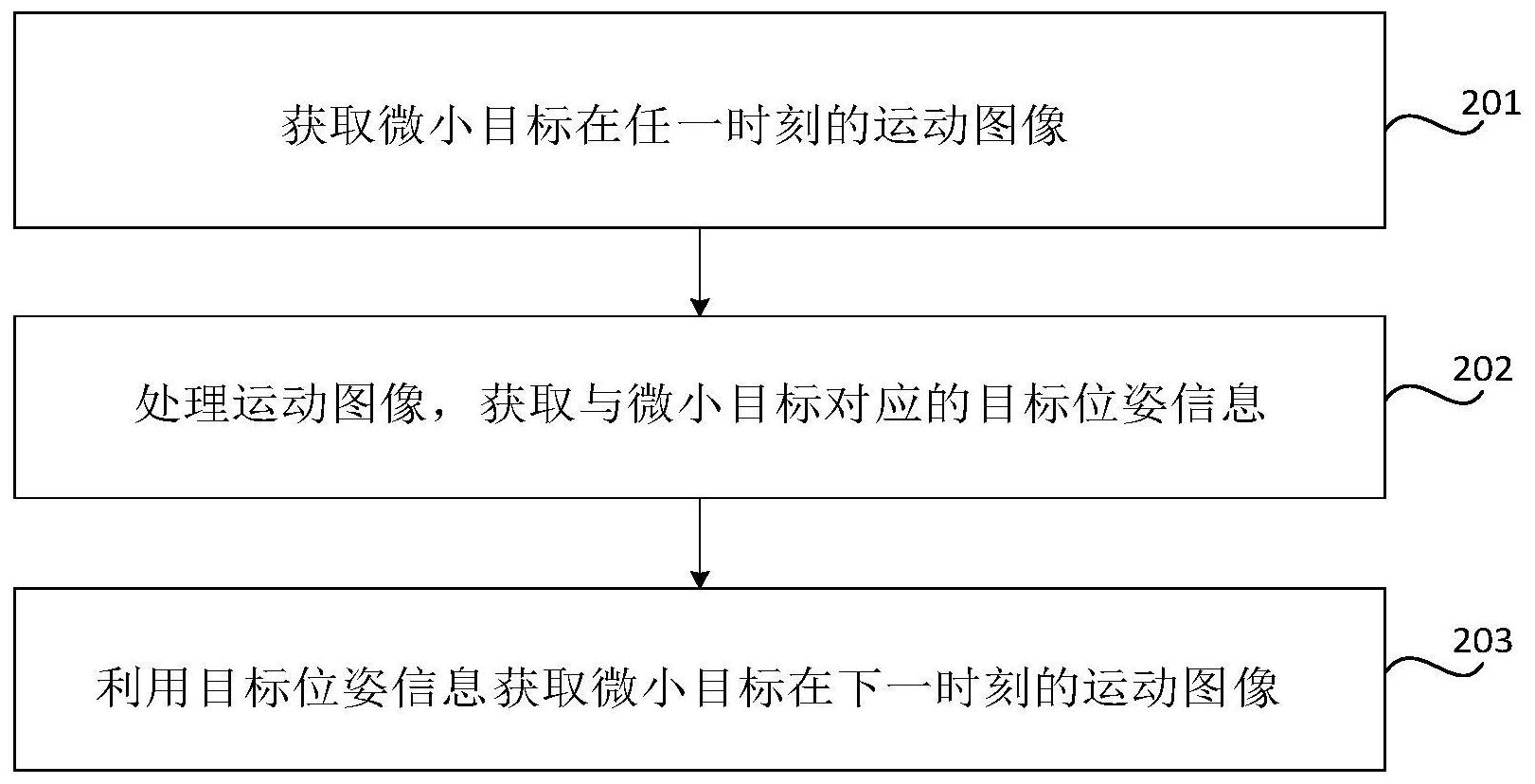
鉴于现有技术中的上述缺陷或不足,期望提供一种可以实时全方位获取微小目标 位姿信息的微小目标的位姿获取方法、系统、装置和介质。 第一方面,本申请实施例提供一种微小目标的位姿获取方法,包括: 获取微小目标在任一时刻的运动图像; 处理运动图像,获取与微小目标对应的目标位姿信息; 利用目标位姿信息获取微小目标在下一时刻的运动图像。 第二方面,本申请实施例提供一种微小目标的位姿获取系统,系统包括:二维转 台、图像采集设备、数据处理设备和转台控制设备, 当外力驱动微小目标运动时,放置于二维转台上的图像采集设备,用于采集微小 目标在任一时刻的运动图像,将运动图像发送给数据处理设备; 数据处理设备,用于接收并处理运动图像,获取与微小目标对应的目标位姿信息, 并将目标位姿信息发送给转台控制设备; 转台控制设备,用于接收目标位姿信息,利用目标位姿信息控制二维转台移动至 目标位姿信息指示的目标位置处,以使图像采集设备采集微小目标在下一时刻的运动图 像,将微小目标在下一时刻的运动图像发送给数据处理设备。 第三方面,本申请实施例提供一种微小目标的位姿获取装置,其特征在于,包括: 第一获取模块,被配置为在第一运动场景中,获取微小目标在任一时刻的运动图 像; 处理模块,被配置为处理运动图像,获取与微小目标对应的目标位姿信息; 第二获取模块,被配置为利用目标位姿信息获取微小目标在下一时刻的运动图 像。 4 CN 111739094 A 说 明 书 2/6 页 第四方面,本申请实施例提供一种计算机可读存储介质,其上存储有计算机程序, 其特征在于, 计算机程序被处理器执行时实现如第一方面的微小目标的位姿获取方法。 本申请的实施例提供的技术方案可以包括以下有益效果: 本申请实施例提供的微小目标的位姿获取方法、系统、装置和介质,可以获取微小 目标在任一时刻的运动图像;处理所述运动图像,获取与所述微小目标对应的目标位姿信 息;利用所述目标位姿信息获取所述微小目标在下一时刻的运动图像。实现了运动过程中 的微小目标的位姿信息的实时全方位获取,提高了获取微小目标的位姿信息的精度和可靠 性。 附图说明 通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它 特征、目的和优点将会变得更明显: 图1为本申请实施例提供的一种微小目标的位姿获取系统的结构示意图; 图2为本申请实施例提供的一种微小目标的位姿获取方法的流程图; 图3为本申请实施例提供的一种模板匹配的示意图; 图4为本申请实施例提供的另一种微小目标的位姿获取系统的结构示意图; 图5为本申请实施例提供的又一种微小目标的位姿获取系统的结构示意图; 图6为本申请实施例提供的另一种微小目标的位姿获取装置的结构示意图。











