
技术摘要:
一种作业车辆,其包括由地面接合装置支撑的车架。悬臂组件联接至车架。悬臂缸连接至车架和悬臂组件。附接件联接器联接至悬臂组件的远侧部分。至少一个倾斜缸联接至悬臂组件和附接件联接器。附接件联接至附接件联接器。附接件包括联接至附接件联接器的附接件框架。附接 全部
背景技术:
为了控制具有俯仰、倾斜和偏转调节相互作用的各种附接件的表面的坡度,通常 需要多次通行才可以以校正由于相互作用引起的坡度误差。
技术实现要素:
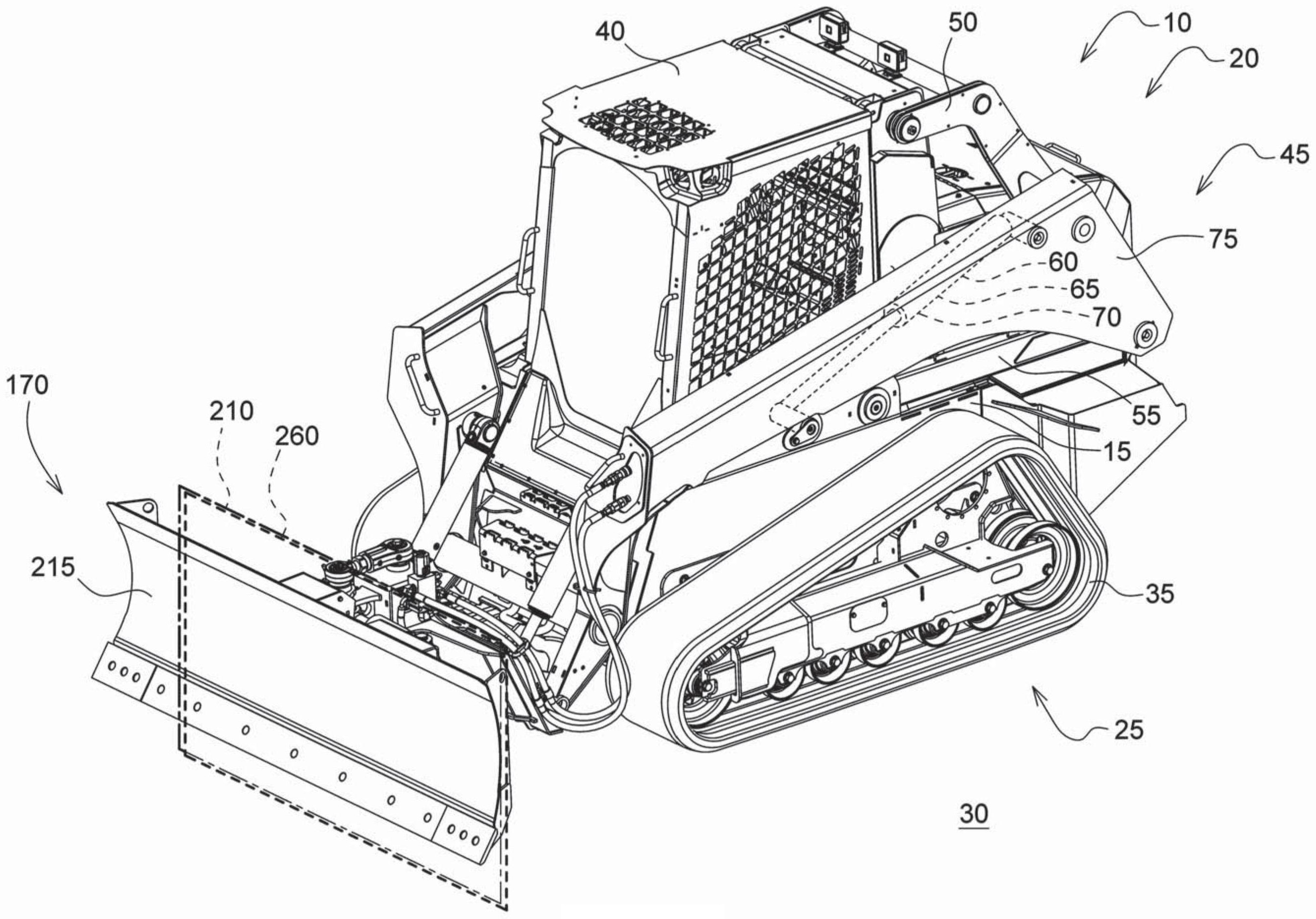
在一个实施例中,公开了一种作业车辆。作业车辆包括车架。至少一个地面接合装 置联接至车架并且被构造成将车架支撑在表面上方。悬臂组件联接至车架。至少一个悬臂 缸联接至车架和悬臂组件,并构造成使悬臂组件运动。附接件联接器联接至悬臂组件的远 侧部分。至少一个倾斜缸联接至悬臂组件和附接件联接器,并且构造成使附接件联接器运 动。附接件联接至附接件联接器。附接件包括联接至附接件联接器的附接件框架。附接件框 架具有下部和上部。附接件还包括铲刀。接头联接至附接件框架的下部和铲刀。接头具有下 表面和上表面。下表面定位成与表面相距一定距离。至少一个偏转缸联接至附接件框架的 下部和铲刀。偏转缸的一部分位于接头的上表面下方。 在另一个实施例中,公开了一种紧凑型履带装载机。紧凑型履带装载机包括车架。 至少一个地面接合装置联接至车架并且被构造成将车架支撑在表面上方。悬臂组件联接至 车架。至少一个悬臂缸联接至车架和悬臂组件,并构造成使悬臂组件运动。附接件联接器联 接至悬臂组件的远侧部分。至少一个倾斜缸联接至悬臂组件和附接件联接器,并且构造成 使附接件联接器运动。附接件联接至附接件联接器。附接件包括联接至附接件联接器的附 接件框架。附接件框架具有下部和上部。附接件还包括推土铲刀。接头联接至附接件框架的 下部和推土铲刀。接头具有下表面和上表面。下表面定位成与表面相距一定距离。至少一个 偏转缸联接至附接件框架的下部和推土铲刀。偏转缸的一部分位于接头的上表面下方。 在又一个实施例中,公开了一种作业车辆。作业车辆包括车架。至少一个地面接合 装置联接至车架并且被构造成将车架支撑在表面上方。悬臂组件联接至车架。至少一个悬 臂缸联接至车架和悬臂组件,并构造成使悬臂组件运动。附接件联接器联接至悬臂组件的 远侧部分。至少一个倾斜缸联接至悬臂组件和附接件联接器,并且构造成使附接件联接器 运动。附接件联接至附接件联接器。附接件包括联接至附接件联接器的附接件框架。附接件 框架具有下部和上部。附接件还包括铲刀。接头联接至附接件框架的下部和铲刀。接头具有 下表面和上表面,下表面定位成与表面相距一定距离。倾斜缸联接至附接件框架的上部和 铲刀。可调节的连杆联接至附接件框架的上部和铲刀。至少一个偏转缸联接至附接件框架 的下部和铲刀。偏转缸的一部分位于接头的上表面下方。 通过考虑详细描述和附图,其他特征和方面将变得显而易见。 4 CN 111593777 A 说 明 书 2/3 页 附图说明 图1是具有铲刀的作业车辆的透视图。 图2是图1的作业车辆的局部放大侧视图。 图3是图1的作业车辆的局部放大侧视图。 图4是图1的作业车辆的局部放大侧视图。 图5是图1的作业车辆的一部分的放大的底部透视图。 图6是根据另一实施例的作业车辆的局部放大侧视图。 在详细解释任何实施例之前,应理解,本公开内容的应用不限于在以下描述中阐 述或在附图中示出的构造细节和部件的布置。本公开能够具有其他实施例并且能够以各种 方式被实践或执行。本发明的其他实施例可以包括来自一个或多个从属权利要求的特征的 任何组合,并且可以将这些特征共同地或分别地并入任何独立的权利要求中。 如本文所使用的,除非另外限制或修改,否则具有元件的列表(该列表中的元件由 连词(例如,“和”)隔开并且还在前面具有短语“一个或多个”或“至少一个”的前缀)表示如 下的配置或布置,该配置或布置可能包括列表的各个元件或这些元件的任何组合。例如, “A,B和C中的至少一个”或“A,B和C中的一个或多个”表示仅A,仅B,仅C或A、B和C中的两个或 更多个的任意组合(例如,A和B;B和C;A和C;或A、B和C)的可能性。











