
技术摘要:
一种基于雷达点云数据的煤矿三维模型构建方法,以置于移动平台上的雷达到煤矿巷道扫描获取的三维点云数据为基础,通过具体算法构建三维模型,实施过程:安装设备,移动平台巷道不同位置扫描获取点云数据,对点云数据进行平台投影,获取巷道截面的离散点表示,利用多项 全部
背景技术:
煤碳作为传统的化石能源虽然存在着诸如环境污染大等问题,在我国的能源构成 中煤碳仍然具有重要的作用。为了保障国家的能源安全以及促进经济发展,煤碳矿采业仍 是我国各个煤碳大省的支术产业。进年来,煤矿安全事故屡见报道,特别是各种煤矿事故救 援更是牵动全国人民以及各级政府的神经。如何保障采矿业安全有序进行,并在矿井事故 发生时实施有效救援是目前大家关注的焦点。规范井下作业位置、建立巷道空间立体模型, 实施实时检测是当前的迫切需求。 掘进机是当前煤矿开采的主要设备。为了保证运行过程中的安全及开采效率,掘 进机必须严格沿预先设计的中轴线位置行进,实现对既定作业面开采。然而由于井下活动 空间及观看视角的限制,掘进机操作人员只能通过经验来判断挖掘位置是否准确,存在较 大的偏离预设作业范围的风险,给矿井作业带来严重安全隐患。 雷达扫描技术为真实空间的三维建模提供了数据基础。根据物体对定向发射的雷 达波的发射特性,雷达装置通过接收反射信号即可确定反射点相对于发射波源的位置信 息。基于此思想,通过在掘进机尾部安装低成本的雷达装置自动实时扫描掘进机尾部煤矿 巷道断面及空间三维形状并输出原始点云数据,将传统的人为测量模式升级为智能测量模 式,然后再将复杂的点云数据快速准确地输出巷道(实际)空间三维模型,实现智能化开采 和自动化生产。
技术实现要素:
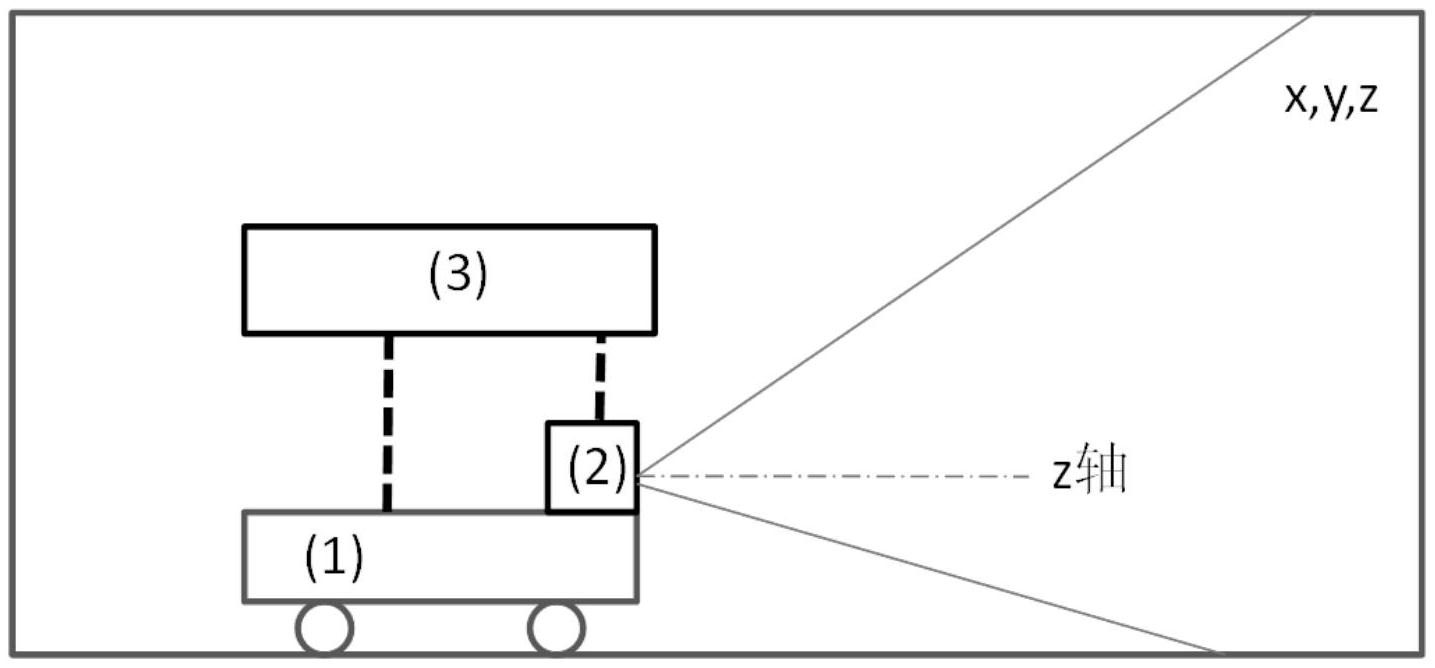
为了帮助煤矿综合中心快速准确地了解当前掘进作业的路线、掘进完成情况和巷 道各工作面的实际形状等信息,利用安装于掘进机尾部的三维雷达扫描仪生成的巷道三维 模型,实现煤矿可视化软件提供三维显示素材,极大地提高自动化、数字化和信息化水平, 实现以最小资源获取最大资源收益的目标,由于雷达点云数据具有以下特点:(1)点云数据 量庞大;(2)点云质量参差不齐;(3)由于雷达扫描盲区,部分点云缺失,因此如何设计算法 实现基于雷达点云数据自动构建巷道空间三维模型是本发明的核心。 本发明解决其技术问题所采用的技术方案是: 一种基于雷达点云数据的煤矿巷道三维模型构建方法,所述方法包括以下步骤: 1)搭建设备采集雷达数据,所述设备包括车载平台(通常为掘进机)、1台激光雷达 和1台工控机,将激光雷达垂直安装于车载平台尾部,确保雷达主机垂直向下;将雷达、工控 机和车载平台控制系统通过网线实现数据传输与交换; 2)在车载平台移动过程中,记录平台移动速度和移动距离信息P,其中P为二元参 量,包含平台t时刻的速度vt及移动距离dt; 3 CN 111612902 A 说 明 书 2/3 页 3)当车载平台行进距离dt处时,雷达绕平台行进方向,即z轴扫描巷道,并记录巷 道内各反射点相对到雷达当前位置的坐标值(xd,xd,z id) ,其中下标d表示雷达给出的反射 点坐标以平台相对于初始平面为参考,上标i表示扫描过程中得到的第i个反射点; 4)将采集到的坐标值(x id,xd,zd) 按zd值进行升序排序,并取前50%的点((xd,yd, z )i,i=1,2,3,...,N)计算平均值 x ,y ,z )id d d d ,i=1,2,3,...,N,得到平面z =z′d; 5)将上述N个点投影到平面z=z′d,得到投影点坐标(xd,yd,z′ id) ,利用多项式对投 影坐标进行拟合,获得拟合函数 其中aj为拟合多项系数,n为多项式的最高阶数; 6)分别计算N个拟合点坐标中最大、最小x轴坐标值,即 xmin=min((xd)i,i=1,2,3....,N) x imax=max((xd) ,i=1,2,3,...,N) 然后将区间[xmin,xmax]均分成M等份xk(=xmin kΔx,k=0,1,2,...,M),其中M为用 户自定义常数,用于确定掘进平面的表示精度,利用步骤5)中得到的多项式计算对应的y轴 坐标值yk,由此获得真实坐标系中Z=z′d dt处掘进面外轮廓的离散表示(xk,yk,Z) 7)掘进平台移动各个不同dt’处后,重复上述步骤2)-6),得到掘进面Z=z′d d‘t 处 的外轮廓离散表示(xk’,k’y ,Z’)。 8)将前后两个掘进平面轮廓对应点相连,即可构建巷道立体三维模型。 进一步,所述步骤1)中,确定初始参数:人为测量掘进机机身长度、机身宽度、机身 高度、回转中心高度、铰接点水平偏移、铰接点高度差、雷达安装位置距回转中心水平偏移、 雷达安装位置距回转中心垂直偏移、雷达安装位置距回转中心前后偏移和雷达安装角度误 差等相关数据。 本发明中的方法可以根据不同的参数来实现不同的模型构建精度,例如增加M值 可以更精度地表示巷道内掘进平面的真实形状。同时,由于采用于多点投影方法,避免了由 于采集过程中坐标误差给模型构建带来的困难,易于实现巷道的实时三维建模。 本发明的有益效果主要表现在:测量设备简单,易于安装实现;模型构建基于实际 巷道的空间结构精度测量结果,模型精度高。 附图说明 图1是基于雷达点云数据的巷道三维模型构建方法设置示间图。











