
技术摘要:
本发明公开了一种永磁同步电机的模型预测电流控制方法,该方法包括如下步骤:通过获取d轴电流扰动项和q轴电流扰动项;获取永磁同步电机的三相相电流、三相线电压和转速信号,利用线性扩张状态观测器得到d轴电流观测值、q轴电流观测值、d轴电流扰动项观测值和q轴电流扰 全部
背景技术:
近年来,随着我国对稀土永磁材料的不断开发与应用,永磁同步电机电机在功率 密度和效率等性能已经超过常规的感应电机、直流电机。因此永磁同步电机被广泛的应用 于工业领域,例如高性能数控机床、工业机器人、电动汽车等。在工业领域的大量应用对永 磁同步电机的控制性能提出了更高的要求。工业上对永磁同步电机控制系统不仅仅要求其 具有良好的稳态精度,还要求具有优良的动态性能,以适应更复杂、环境更恶劣的场合。 常用的永磁同步电机控制系统由外环转速环和内环电流环组成。其中内环的带宽 是影响控制系统动态性能的关键因素。目前永磁同步电机控制系统大都采用磁场定向控 制,通过将三相定子电流变换到同步旋转坐标系下再使用PI调节器对电机的d、q轴电流分 别进行控制,从而实现电机励磁电流分量和转矩电流分量的解耦,简化控制过程、提高控制 精度。但由于数字控制系统的固有延时,如保持、量化、死区、滤波等延时严重影响电流环的 带宽。因此在数字控制系统中,为了提高控制性能,就要使得控制算法的运行时间尽可能的 短。模型预测电流控制算法是一种能够有效的提高电流环的动态性能的算法,因而被工业 中广泛研究。 然而,模型预测电流控制算法过于依赖模型的参数。在永磁同步电机的运行过程 中,随着永磁同步电机负载、环境温度的变化,永磁同步电机的电枢电阻、电枢电感等电气 参数会随着永磁同步电机的工况变化而变化,因此提高永磁同步电机模型预测电流控制算 法的鲁棒性是使其能够被广泛应用于工业生产中的前提。 在现有的提高永磁同步电机模型预测电流控制算法的鲁棒性方法中,传统观测器 法(如滑模观测器SMO,Luenberger观测器等)、在线参数辨识法被广泛应用。但在传统观测 器法提高算法鲁棒性的方法中,龙伯格观测器法鲁棒性较差而滑膜观测器的抖振对系统动 态性能的影响,有可能破坏系统滑动模态的运行条件,从而使系统出现超调过大、过渡过程 增长、甚至出现不稳定状态;而现有的在线参数辨识方法由于辨识矩阵的欠秩,只能辨识出 两个参数 ,因此对于凸极电 机无法辨识出全部的电阻 和电 感参数。发明专利 201711252132.34提出了一种采用扩展滑膜观测器提高模型预测电流控制算法,然而在该 算法中滑模面趋近率选择简单的等速趋近率,并没有考虑到滑膜的抖振问题;发明专利 201910499568.5采用扩张状态观测器作为扰动观测器与无差拍电流预测控制结合,然而在 该算法中将观测器观测出的扰动项直接补偿到电压方程中,这样做会在参数误差过大时, 可能无法收敛。
技术实现要素:
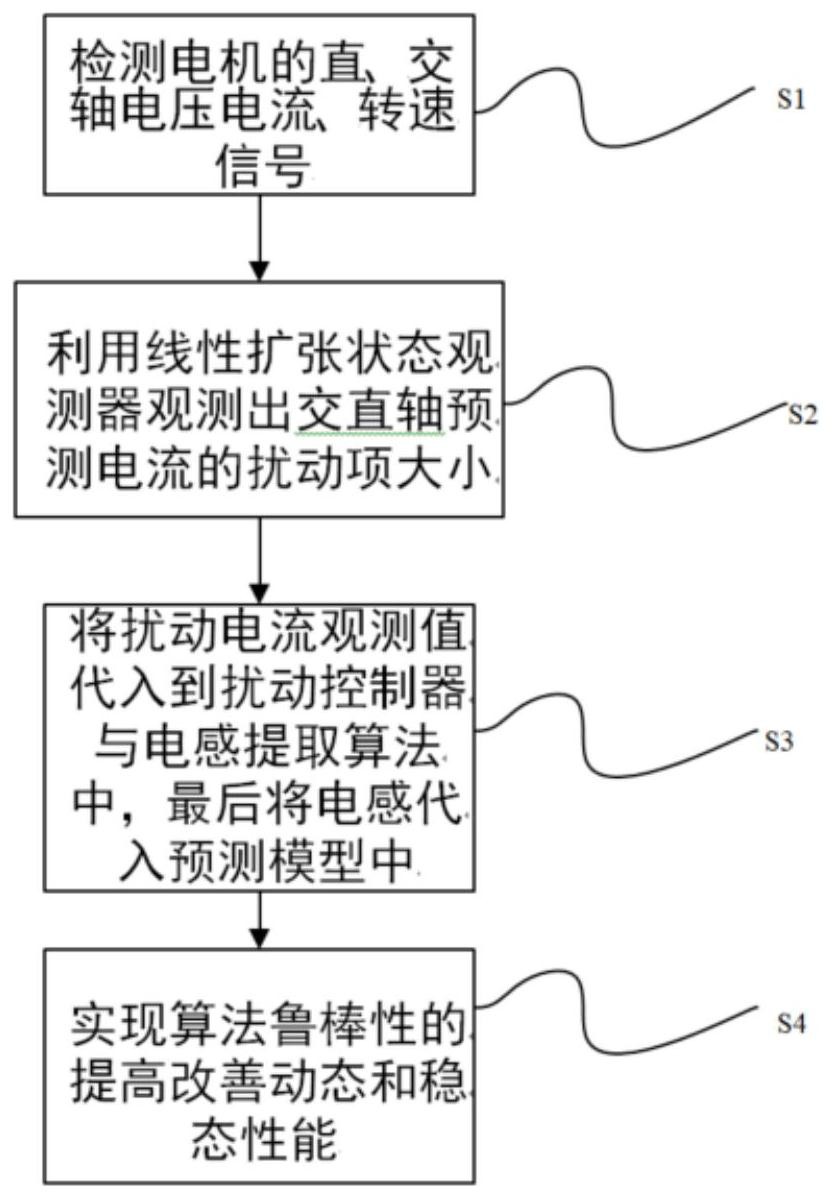
针对现有技术的以上缺陷或改进需求,本发明提供了一种永磁同步电机的模型预 5 CN 111600523 A 说 明 书 2/10 页 测电流控制方法,旨在解决随着永磁同步电机负载、环境温度的变化,永磁同步电机的电枢 电阻、电枢电感等电气参数会随着永磁同步电机的工况变化而变化,因而导致永磁同步电 机模型预测电流控制算法的鲁棒性过低的技术问题。 为实现上述目的,按照本发明的一个方面,提供了一种永磁同步电机的模型预测 电流控制方法,该方法包括如下步骤: S1.获取永磁同步电机在旋转坐标系下的电压方程组,利用所述电压方程组获取d 轴电流扰动项和q轴电流扰动项; S2.获取永磁同步电机的三相相电流、三相线电压和转速信号,利用线性扩张状态 观测器、d轴电流扰动项和q轴电流扰动项,得到d轴电流观测值、q轴电流观测值、d轴电流扰 动项观测值和q轴电流扰动项观测值; S3.利用d轴电流扰动项观测值和q轴电流扰动项观测值获取扰动控制器的d轴输 出值和q轴输出值,利用电感提取算法获取电感预测值,并结合增量预测模型得到d轴电流 预测值和q轴电流预测值; S4.利用电感预测值、d轴电流预测值和q轴电流预测值对永磁同步电机的开关信 号进行调整,以实现永磁同步电机的闭环控制。 作为本发明的进一步改进,电压方程组具体为: 其中,id、iq、ud、uq、we和ψf分别为永磁同步电机在旋转坐标系下的d轴电流、交流电 流、d轴电压、q轴电压、电角速度和永磁体磁链,R0、L0分别为永磁同步电机的电枢电阻初始 值、电枢电感初始值,ΔL为电枢电感的真实值与初始值之间的误差,ΔR为电枢电阻的真实 值与初始值之间的误差,Δψf为永磁体磁链的真实值与初始值之间的误差。 作为本发明的进一步改进,利用所述电压方程组获取d轴电流扰动项fd和q轴电流 扰动项fq具体为: 作为本发明的进一步改进,电感提取算法的迭代表达式为: 其中,ELd为d轴扰动控制器的输出值,ELq为q轴扰动控制器的输出值,α为权重因 子, 分别为上一时刻和当前时刻永磁同步电机的电感预测值,Ts为采样周期。 作为本发明的进一步改进,线性扩张状态观测器的d轴电流观测值和d轴电流扰动 项观测值具体为: 6 CN 111600523 A 说 明 书 3/10 页 其中, ud(k)为当前时刻的d轴电压的采样值,L0为永磁同步电机 的电枢电感初始值, 为当前时刻的d轴电流的观测值, 为下一时刻的d轴电流的 观测值,id(k)为当前时刻的d轴电流的采样值,ed(k)为当前时刻的d轴电流的观测值和采样 值之间的误差, 为当前时刻的d轴电流扰动项观测值, 为下一时刻的d轴电流扰 动项观测值,Ts为采样周期,β1、β2分别为所述线性扩张状态观测器的第一增益和第二增益。 作为本发明的进一步改进,增量预测模型中d轴电流预测值ipd(k 1)表达式为: 其中,Rs为永磁同步电机的电枢电阻的真实值,Ls为永磁同步电机的电枢电感的真 实值,ud(k-1)为当上一时刻的d轴电压的采样值,id(k-1)为上一时刻的d轴电流的采样值, iq(k-1)和iq(k)分别为上一时刻和当前时刻的q轴电流的采样值,we为永磁同步电机的电角 速度。 作为本发明的进一步改进,线性扩张状态观测器的q轴电流观测值和q轴电流扰动 项观测值具体为: 其中, uq(k)为当前时刻的q轴电压的采样值,L0 为永磁同步电机的电枢电感初始值,we为永磁同步电机的电角速度,ψf为永磁同步电机的永 磁体磁链,Δψf为永磁体磁链的真实值与初始值之间的误差, 为当前时刻的q轴电流观 测值, 为下一时刻的q轴电流观测值,iq(k)为当前时刻的q轴电流的采样值,eq(k)为 当前时刻的q轴电流的观测值和采样值之间的误差, 为当前时刻的q轴电流扰动项观测 值, 为下一时刻的q轴电流扰动项观测值,Ts为线性扩张状态观测器的采样周期,β1、 β2分别为所述线性扩张状态观测器的第一增益和第二增益。 作为本发明的进一步改进,增量预测模型中q轴电流预测值ipq(k 1)表达式为: 7 CN 111600523 A 说 明 书 4/10 页 其中,Rs为永磁同步电机的电枢电阻的真实值,Ls为永磁同步电机的电枢电感的真 实值,ud(k-1)为当上一时刻的d轴电压的采样值,id(k-1)和id(k)分别为上一时刻和当前时 刻的d轴电流的采样值,iq(k-1)为上一时刻的q轴电流的采样值。 为实现上述目的,按照本发明的另一个方面,提供了一种终端设备,包括至少一个 处理单元、以及至少一个存储单元,其中,存储单元存储有计算机程序,当程序被处理单元 执行时,使得处理单元执行上述方法的步骤。 为实现上述目的,按照本发明的另一个方面,提供了一种计算机可读介质,其存储 有可由终端设备执行的计算机程序,当程序在终端设备上运行时,使得终端设备上述方法 的步骤。 总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效 果: 本发明的一种永磁同步电机的模型预测电流控制方法,其通过测量永磁同步电机 带载工况下的参数进而得到对应的旋转坐标系下的参数;利用扩张状态观测器进行永磁同 步电机d、q轴预测电流扰动项的观测;利用观测得到的扰动项进行调节得到电感误差值,并 由电感提取算法得到电感的估计值,代入到永磁同步电机模型预测电流控制算法和d、q轴 扩张状态观测器,不断修正电感估计值使得因参数不匹配而产生的扰动项为零,因而可以 使得永磁同步电机获得较好的动态和稳态性能。 本发明的一种永磁同步电机的模型预测电流控制方法,其依据自抗扰控制技术中 的“总扰动”思想设计了扩张状态观测器,普通观测器只观测系统状态,扩张状态观测器还 估计外部扰动和未知模型的系统状态,所以扩张状态观测器不过于依赖数学模型具有很强 的鲁棒性,同时采用线性扩张状态观测器估计总扰动,用两个线性扩张状态观测器分别构 成d轴预测电流和q轴预测电流的扰动观测器,实时的观测出模型预测电流控制算法中因为 电气参数不匹配而造成的总扰动,按照带宽法进行参数设计方便且易实现。 本发明的一种永磁同步电机的模型预测电流控制方法,其通过采用增量预测模型 降低了传统模型预测控制中电气参数的敏感性,根据自抗扰控制中“总扰动”的思想,建立 了d轴和q轴的扩张状态观测器,观测出因电气参数不匹配而造成的扰动。并将观测出的扰 动及电流代入到扰动控制器中,扰动控制器的输出代入电感提取算法,实时得到电感的估 计值代入预测模型中,在线修正电感参数的误差,有效的提高了控制系统的稳态和动态性 能,有效的消除了永磁同步电机因电气参数不匹配而造成的扰动,提高了算法的鲁棒性。 附图说明 图1为本发明实施例的一种永磁同步电机的模型预测电流控制方法的示意图; 图2为本发明实施例的一种











