
技术摘要:
本发明涉及一种基于PSO和RBFNN的隧道交通照明系统智能控制方法,包括以下步骤:先根据隧道的照明条件,由RBFNN确定照明系数;再将照明系数输入PSO中;然后对PSO中粒子群的各个粒子的位置和速度进行初始化;再根据适应度函数对每个粒子的适应度值进行计算,确定粒子的历 全部
背景技术:
隧道是当今交通道路不可缺少的部分,随着我国隧道里程的飞速增长,如何减少 隧道内部照明所消耗的能源也成为了当今节约能源的重要课题。由于隧道内部结构的特殊 性,对于隧道内照明精确度的要求也高于普通交通照明,这也使得隧道内照明系统的智能 控制得到了广泛的关注。 传统的对隧道照明系统的控制方法多使用非线性模糊控制系统,由于 if...then...的非线性映射关系是相关领域专家根据日常操作经验总结的控制规则。不仅 不能够保证映射关系的完整性和匹配度,而且专家思想因人而异,使得获得准确的控制规 则遭遇难题。并且此模糊控制系统没有先将对输入输出变量导入系统的内部进行训练分 析,因此没有能够结合目前比较成熟完备的控制理论方法和数学模型,具有可移植性较弱、 系统容错率低等缺点。 PSO算法是目前智能照明控制中常用的算法,因为PSO算法可以通过迭代,得出有 效地寻找出最优的照明配置方案。但是PSO算法的参数如果采用人工设定会大大减少算法 的精确度。
技术实现要素:
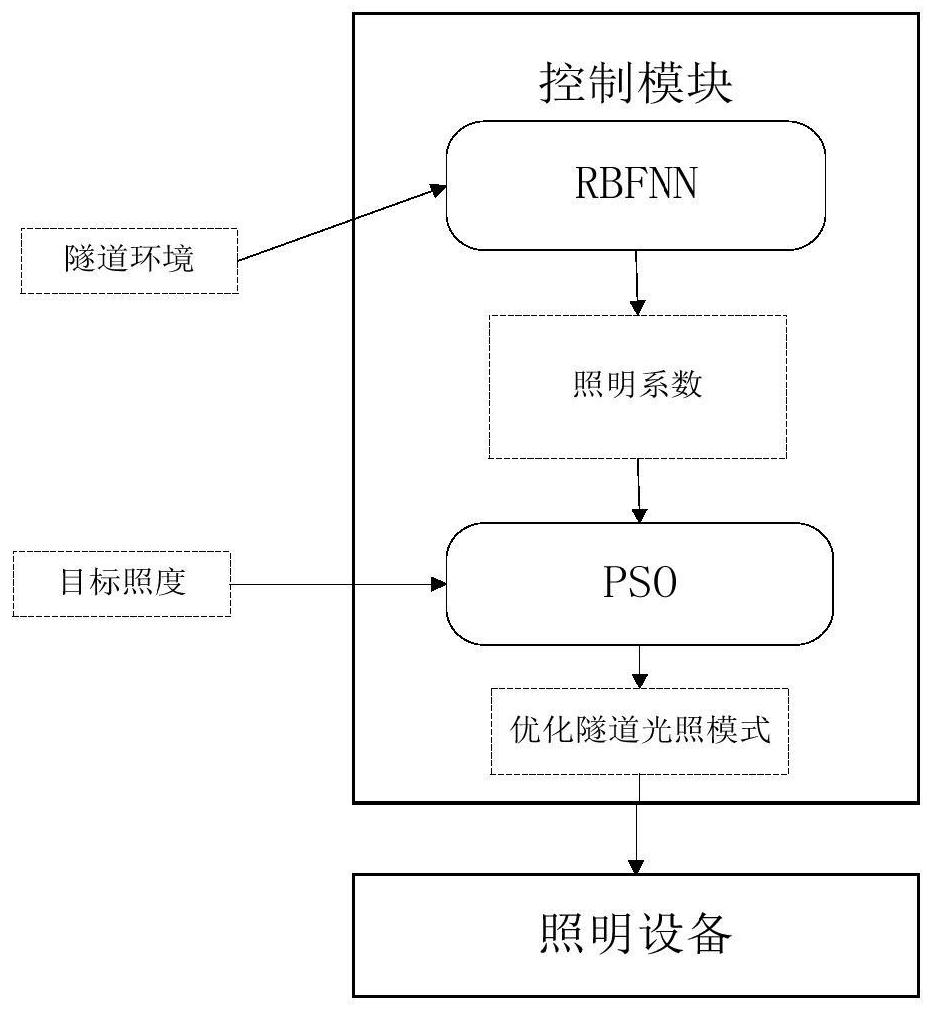
本发明的目的是提供一种基于PSO和RBFNN的隧道交通照明系统智能控制方法。具 体是将训练传感器的位置和每个灯对这些传感器的照明贡献作为训练数据,建立出RBFNN 模型,再通过该RBFNN模型确认PSO的照明系数,最终经过PSO算法数次迭代得出照明系统配 置的最优解,并作为隧道照明系统中每盏灯的最优照度配置方案。 为达到上述目的,本发明采用的方案如下: 一种基于PSO和RBFNN的隧道交通照明系统智能控制方法,包括以下步骤: (1)根据隧道的照明条件,由径向基函数神经网络RBFNN(Radial Basis Function Neural Network)确定照明系数; 为了获得RBFNN网络的数据,需要在隧道的各位置安置m个传感器来测量n盏灯对 该位置的照度贡献;设隧道中的工作区域的高度相同,将灯和传感器的位置维数由三维降 低为二维; 将传感器的位置和每个灯对这些传感器的照度贡献作为训练数据,根据这些数据 建立出RBFNN模型,即:所有传感器的位置(x,y)和每个灯的序号i作为RBFNN的输入,照明系 数aij作为RBFNN的输出,其中,n盏灯的序号为1,…,i,…,n,i为灯的序号,n为灯的总数;m个 传感器的序号为1,…,j,…,m,j为传感器的序号,m为传感器的总数;照明系数aij为灯i对于 传感器j所在位置的照度贡献比(用于判断最优解的粒子是否满足最低照度); 4 CN 111556631 A 说 明 书 2/6 页 则每盏灯对所有传感器的照度贡献形成一个RBFNN,有n盏灯就有n个RBFNN网络; (2)将照明系数aij输入粒子群优化算法PSO(Particle swarm optimization)中; (3)对粒子群优化算法PSO中粒子群的各个粒子的位置和速度进行初始化,初始化 即为随机生成一个粒子群;本发明中的粒子速度并不是广义上的速度,指的是粒子每次迭 代的改变量; 各个粒子的位置初始化为:(F1,F2,...,Fn),其中,F1,F2,...,Fn分别为灯1,2,…,n 的亮度调节比,F1,F2,...,Fn的初始化范围为[0,1]; 各个粒子的速度初始化为:(v1,v2,...,vn),其中,v1,v2,...,vn分别为灯1,2,…,n 的亮度调节比的变化速度,v1,v2,...,vn的初始化范围为[-0.5,0.5]; (4)根据适应度函数对每个粒子的适应度值进行计算,确定粒子的历史最优解;所 述适应度函数如下所示: 式中,E1,E2,Ej,...,Em为传感器1,2,…,m接受的来自灯1,2,…,n的照度总和; a11,…,aij,…,amn为照明系数; F1,F2,...,Fn分别为灯1,2,…,n的亮度调节比; Cost为适应度值; m为传感器的总数,n为灯的总数,i为传感器的序号,j为灯的序号; T为目标照度; penalty为补偿系数,在灯i的照度小于目标照度时,对这个照明配置方案产生的 是负评价,所以令penalty=10000; (5)根据历史最优解的粒子迭代每个粒子的速度,具体为: 第k 1次迭代后粒子h的速度为: 其中,k是 迭代次数, 是更新前粒子h的粒子速度,h的范围为[0,s],s为粒子群的粒子总数,ω是粒 子h的粒子惯性权值,ph是粒子h的历史最优位置, 是粒子h在第k次迭代的位置,pg是全局 最优位置, 和 是加速度系数, 和 为设定值,一般取值区间为[0,4]; (6)迭代每个粒子的位置,具体为: 第k 1次迭代后粒子h的位置为: 其中, 为粒子h在第k 1次迭代的位置; 为粒子h在第k次迭代的位置; 为 粒子h第k 1次迭代的粒子速度; 5 CN 111556631 A 说 明 书 3/6 页 (7)根据适应度函数比较每个粒子的历史最优解,进行评估,更新粒子群的全局最 优解; (8)若当前迭代次数达到最大迭代次数,或者适应度误差系数α≤5%,即全局最优 解的适应度值符合适应度最优值,则输出当前的最优解;否则,粒子群优化算法PSO将再次 从第四步开始进行迭代; (9)输出最优解粒子,即隧道照明系统中每盏灯的最优照度配置方案。 作为优选的技术方案: 如上所述的一种基于PSO和RBFNN的隧道交通照明系统智能控制方法,其特征在 于,所述适应度函数是用来评估粒子好坏的指标,所述适应度值越小表示这个粒子越接近 最优位置。 如上所述的一种基于PSO和RBFNN的隧道交通照明系统智能控制方法,所述最大迭 代次数根据实验选定,算法收敛时的迭代次数通常定为最大迭代次数。 如上所述的一种基于PSO和RBFNN的隧道交通照明系统智能控制方法,所述适应度 误差系数 T为目标照度。 有益效果 (1)本发明一种基于PSO和RBFNN的隧道交通照明系统智能控制方法,使用的神经 网络相较于传统的模糊控制,具有较强的学习能力,对于不同环境的适应能力更好,并且具 有更高的容错能力;RBFNN具有其他前向网络所不具有的最佳逼近性能和全局最优特性,并 且结构简单,训练速度快; (2)本发明一种基于PSO和RBFNN的隧道交通照明系统智能控制方法,将PSO与 RBFNN相结合,提高了算法的精确度,全局最优解使得照明方案保证亮度舒适的情况下节约 能量。 附图说明 图1为本发明的基于PSO和RBFNN的隧道交通照明系统智能控制方法的基本结构示 意图; 图2为本发明的PSO算法的流程图。











