
技术摘要:
本发明公开了一种自动驾驶交通工具、自动驾驶系统及自动驾驶安全控制方法。根据本发明实施例的自动驾驶安全控制方法包括监测无人驾驶交通工具的行驶信息及周围环境信息;根据所述行驶信息判定所述无人驾驶交通工具的自动驾驶装置是否失效;以及在判定所述自动驾驶装置 全部
背景技术:
随着现代科技的发展,智能汽车已成为汽车产业发展的战略发展方向,其中的自 动驾驶系统已成为近年来的研发热点和技术前沿,得到了广泛地发展。 自动驾驶技术需要多种类型的传感器和控制器相互配合,系统较为复杂。此外,自 动驾驶技术极大程度上减少了人在驾驶中的参与度。因此,安全性能是自动驾驶系统需要 着重考虑的。 在现有的自动驾驶安全控制方法中,主要存在以下问题: 1、在现有的技术方案中,主要保证的是失效装置的安全,无法保证失效装置周围 装置的安全,容易发生二次事故。 2、现有的技术方案通常是在自动驾驶模块中设置一个用于安全监测的安全单元, 安全单元一般与其他单元共享内存、硬盘等资源,安全单元易受其他单元的影响,如果自动 驾驶模块的某个单元发生异常,很可能会影响到安全单元的运行,甚至导致安全单元的失 效。 3、在现有技术中,通常是针对自动驾驶模块进行安全监测,无法实现对硬件故障 引起的自动驾驶失效的监测。 因此,希望能有一种新的自动驾驶安全控制方法、自动驾驶系统及安全装置,能够 克服上述问题。
技术实现要素:
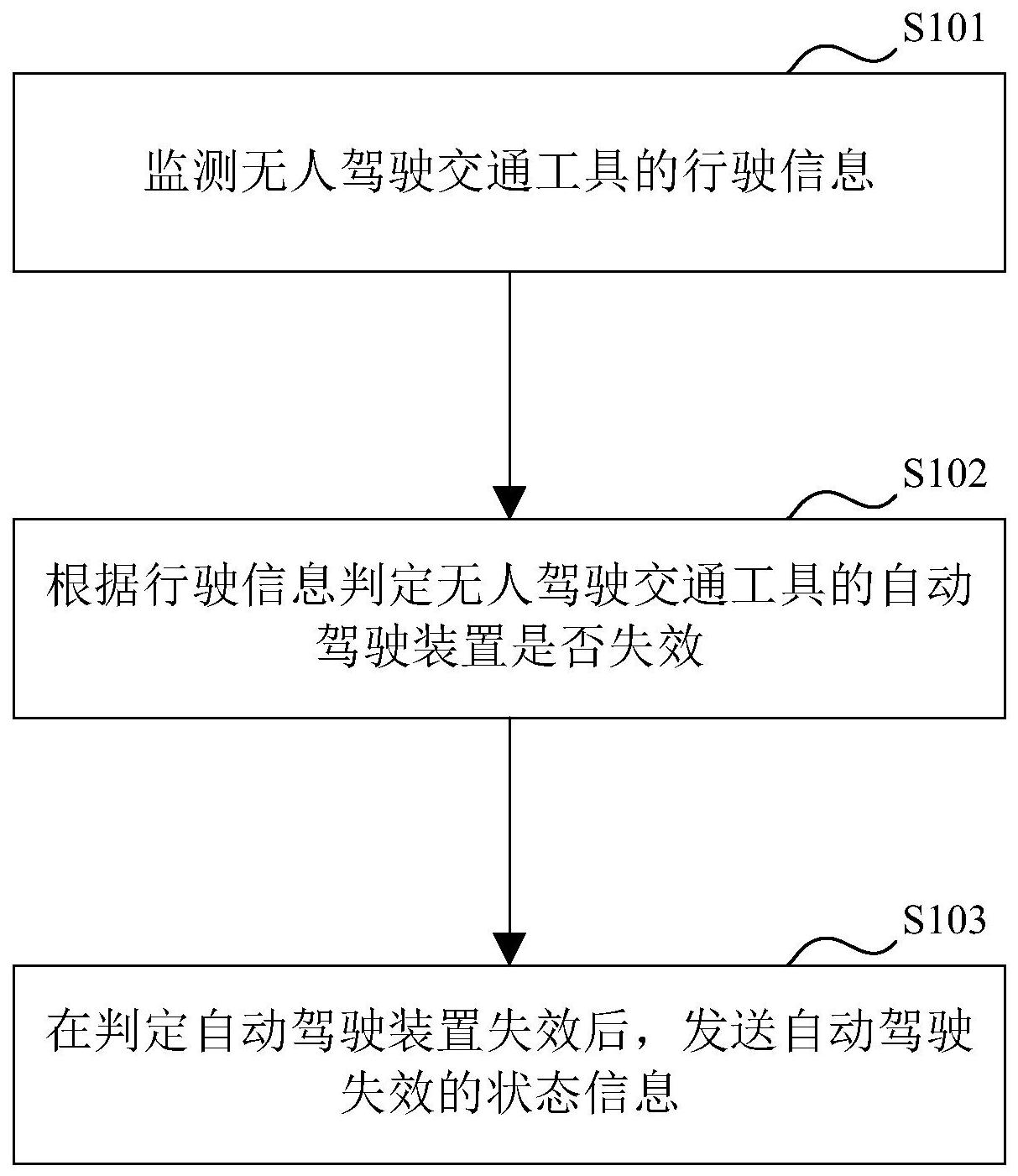
鉴于上述问题,本发明的目的在于提供一种自动驾驶交通工具、自动驾驶系统及 自动驾驶安全控制方法,从而提高自动驾驶装置失效监测的可靠性,并且提高失效装置周 围装置的安全性。 根据本发明的一方面,提供一种自动驾驶交通工具,包括:自动驾驶装置,所述自 动驾驶装置用于所述自动驾驶交通工具的自动驾驶;以及安全装置,所述安全装置用于监 测所述自动驾驶交通工具的行驶信息,其中,根据所述行驶信息判定所述自动驾驶装置是 否失效;以及在判定所述自动驾驶装置失效后,所述自动驾驶交通工具向外界发送自动驾 驶失效的状态信息和/或切换所述自动驾驶交通工具至避险模式。 优选地,所述自动驾驶交通工具还包括:接收装置,所述接收装置接收满足预定位 置关系的自动驾驶交通工具的所述自动驾驶失效的状态信息。 根据本发明的另一方面,提供一种自动驾驶系统,包括如前所述的自动驾驶交通 工具;以及服务器,所述服务器接收所述状态信息和/或在接收到所述状态信息后,发送所 述状态信息。 4 CN 111591303 A 说 明 书 2/9 页 根据本发明的再一方面,提供一种自动驾驶安全控制方法,包括:监测无人驾驶交 通工具的行驶信息及周围环境信息;根据所述行驶信息判定所述无人驾驶交通工具的自动 驾驶装置是否失效;以及在判定所述自动驾驶装置失效后,发送所述自动驾驶失效的状态 信息至服务器和/或切换所述无人驾驶交通工具至避险模式。 优选地,所述自动驾驶安全控制方法还包括:在接收到所述状态信息后,所述服务 器将所述自动驾驶失效的状态信息发送至满足预定位置关系的无人驾驶交通工具。 优选地,所述行驶信息包括:所述无人驾驶交通工具的位置、横纵向速度、与周围 的车辆的距离、与周围的人的距离。 优选地,所述根据所述行驶信息判定所述无人驾驶交通工具的自动驾驶装置是否 失效包括以下中的至少一个: 如果所述无人驾驶交通工具的位置偏离电子地图上的设定路线,判定所述无人驾 驶交通工具的自动驾驶装置失效; 如果所述无人驾驶交通工具的位置越过电子地图上的道路边界,判定所述无人驾 驶交通工具的自动驾驶装置失效; 如果所述无人驾驶交通工具的位置越过电子地图上的道路边界的时间到达第一 预定时间,判定所述无人驾驶交通工具的自动驾驶装置失效; 如果所述无人驾驶交通工具的位置进入电子地图上的禁停区域,判定所述无人驾 驶交通工具的自动驾驶装置失效; 如果所述无人驾驶交通工具的位置进入电子地图上的禁停区域的时间达到第二 预定时间,判定所述无人驾驶交通工具的自动驾驶装置失效; 如果所述与周围的交通工具的距离或与周围的人的距离小于安全距离,判定所述 无人驾驶交通工具的自动驾驶装置失效; 如果所述横纵向速度满足预定速度条件,判定所述无人驾驶交通工具的自动驾驶 装置失效。 优选地,所述安全距离为以下中的一个: 固定安全距离; 按照如下公式计算的安全距离: 其中,Ssafe是安全距离,vego所述无人驾驶交通工具的横向速度或纵向速度,vother 是周围的交通工具的横向或者纵向速度,a为制动减速度,Smargin是常数余量。 优选地,所述避险模式包括安全避险模式和紧急避险模式,其中在所述安全避险 模式下,规划避险路径,控制所述无人驾驶交通工具按照避险路径进行避险;在所述紧急避 险模式下,控制所述无人驾驶交通工具紧急制动。 根据本发明的又一方面,提供一种自动驾驶安全控制方法,其特征在于,包括以下 步骤:接收各无人驾驶交通工具上报的位置、和自动驾驶是否失效的状态信息;如果接收到 自动驾驶失效的状态信息,向上报的位置与该自动驾驶失效的无人驾驶交通工具的位置满 足预定位置关系的无人驾驶交通工具发送该状态信息。 根据本发明实施例的自动驾驶交通工具、自动驾驶系统及自动驾驶安全控制方 5 CN 111591303 A 说 明 书 3/9 页 法,提高了自动驾驶失效监测的可靠性,并在自动驾驶失效时,能够在保证自身安全的同 时,保证周围车辆的安全。 附图说明 通过以下参照附图对本发明实施例的描述,本发明的上述以及其他目的、特征和 优点将更为清楚,在附图中: 图1示出了根据本发明实施例一对应的自动驾驶安全控制方法的流程示意图; 图2示出了根据本发明实施例二对应的自动驾驶安全控制方法的流程示意图; 图3示出了根据本发明实施例三对应的自动驾驶安全控制方法的流程示意图; 图4示出了根据本发明实施例四对应的自动驾驶安全控制方法的流程示意图; 图5示出了根据本发明实施例五对应的自动驾驶安全控制方法的流程示意图; 图6示出了根据本发明实施例六对应的自动驾驶安全控制方法的流程示意图; 图7示出了根据本发明实施例七对应的自动驾驶安全控制方法的流程示意图; 图8示出了根据本发明实施例一对应的自动驾驶交通工具的结构示意图; 图9示出了根据本发明实施例二对应的自动驾驶系统的结构示意图; 图10示出了根据本发明实施例一对应的自动驾驶系统的应用场景示意图; 图11示出了根据本发明实施例二对应的自动驾驶系统的应用场景示意图; 图12示出了根据本发明实施例三对应的自动驾驶系统的应用场景示意图; 图13示出了根据本发明实施例四和实施例七对应的自动驾驶系统的应用场景示 意图; 图14示出了根据本发明实施例五和实施例六对应的自动驾驶系统的应用场景示 意图。











