
技术摘要:
本发明提供当存在多个能够进行车道变更的空间的情况下,以适当地进行车道变更的方式对车辆的行驶进行控制的行驶控制装置、行驶控制方法以及存储程序的存储介质。根据前方其他车辆与邻近车辆的车间距离、前方其他车辆的速度以及邻近车辆的速度来确定能够进行车辆的车道 全部
背景技术:
近年来,已知有对车辆的行驶自动地进行控制的技术。进行车道变更的技术也是 其中之一,在专利文献1中,记载了如下内容:当作为在本车辆的周边行驶的周边车辆而存 在在本车辆所行驶的车道上在本车辆前方行驶的前行车辆、在相邻车道上行驶的前方基准 车辆以及后方基准车辆的情况下,考虑到这些周边车辆的将来位置,以前方基准车辆与后 方基准车辆之间为目标来进行车道变更。 现有技术文献 专利文献 专利文献1:国际公开第2017/141765号 然而,在专利文献1中,并没有提及当存在能够进行车道变更的多个目标的情况下 如何进行车道变更。
技术实现要素:
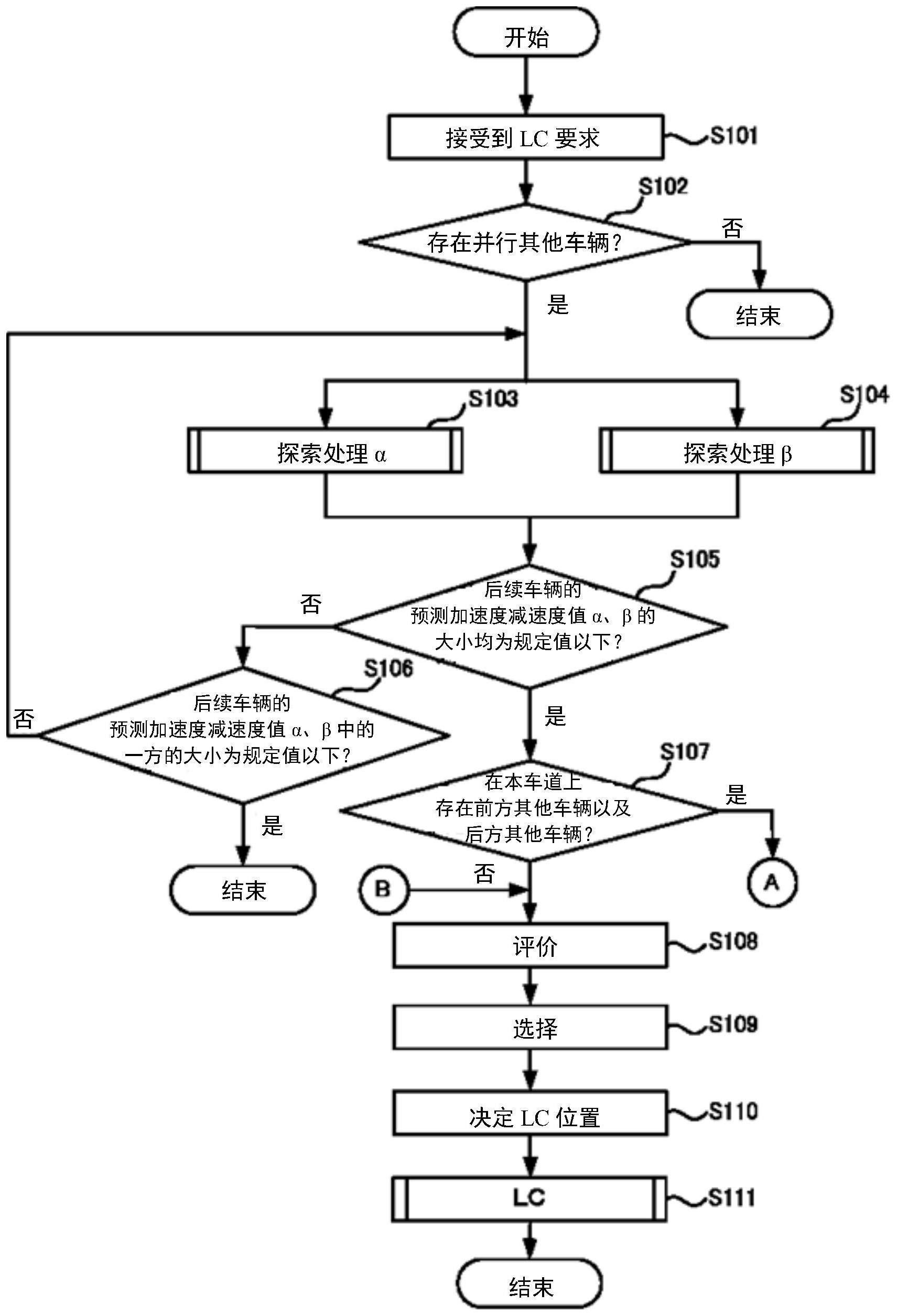
发明所要解决的问题 本发明的目的在于提供当存在多个能够进行车道变更的空间的情况下,以适当地 进行车道变更的方式对车辆的行驶进行控制的行驶控制装置、行驶控制方法以及存储程序 的存储介质。 用于解决问题的手段 本发明所涉及的行驶控制装置具备: 获取单元,其获取车辆的外界的信息; 控制单元,其基于由所述获取单元获取到的所述车辆的外界的信息,对所述车辆 的行驶进行控制; 第一确定单元,在由所述获取单元获取到在与所述车辆的行驶车道不同的相邻车 道上在所述车辆的附近行驶的邻近车辆的信息、和在所述邻近车辆的前方行驶的前方其他 车辆的信息来作为所述车辆的外界的信息的情况下,所述第一确定单元根据所述前方其他 车辆与所述邻近车辆的车间距离、所述前方其他车辆的速度以及所述邻近车辆的速度来确 定能够进行所述车辆的车道变更的第一可能空间; 第二确定单元,在由所述获取单元获取到在与所述车辆的行驶车道不同的相邻车 道上在所述车辆的附近行驶的邻近车辆的信息、和在所述邻近车辆的后方行驶的后方其他 车辆的信息来作为所述车辆的外界的信息的情况下,所述第二确定单元根据所述邻近车辆 与所述后方其他车辆的车间距离、所述邻近车辆的速度以及所述后方其他车辆的速度来确 定能够进行所述车辆的车道变更的第二可能空间;以及 5 CN 111731294 A 说 明 书 2/19 页 评价单元,其对由所述第一确定单元确定的所述第一可能空间和由所述第二确定 单元确定的所述第二可能空间进行评价, 所述控制单元基于所述评价单元所做出的评价的结果,以进行朝向所述相邻车道 的车道变更的方式对所述车辆的行驶进行控制。 本发明所涉及的行驶控制方法具有: 获取步骤,在该获取步骤中,获取车辆的外界的信息; 控制步骤,在该控制步骤中,基于在所述获取步骤中获取到的所述车辆的外界的 信息,对所述车辆的行驶进行控制; 第一确定步骤,当在所述获取步骤中获取到在与所述车辆的行驶车道不同的相邻 车道上在所述车辆的附近行驶的邻近车辆的信息、和在所述邻近车辆的前方行驶的前方其 他车辆的信息来作为所述车辆的外界的信息的情况下,在所述第一确定步骤中,根据所述 前方其他车辆与所述邻近车辆的车间距离、所述前方其他车辆的速度以及所述邻近车辆的 速度来确定能够进行所述车辆的车道变更的第一可能空间; 第二确定步骤,当在所述获取步骤中获取到在与所述车辆的行驶车道不同的相邻 车道上在所述车辆的附近行驶的邻近车辆的信息、和在所述邻近车辆的后方行驶的后方其 他车辆的信息来作为所述车辆的外界的信息的情况下,在所述第二确定步骤中,根据所述 邻近车辆与所述后方其他车辆的车间距离、所述邻近车辆的速度以及所述后方其他车辆的 速度来确定能够进行所述车辆的车道变更的第二可能空间;以及 评价步骤,在该评价步骤中,对在所述第一确定步骤中确定的所述第一可能空间 和在所述第二确定步骤中确定的所述第二可能空间进行评价, 在所述控制步骤中,基于所述评价步骤中的评价的结果,以进行朝向所述相邻车 道的车道变更的方式对所述车辆的行驶进行控制。 本发明所涉及的存储程序的存储介质存储用于使计算机发挥如下功能的程序: 获取车辆的外界的信息; 基于获取到的所述车辆的外界的信息,对所述车辆的行驶进行控制; 在获取到在与所述车辆的行驶车道不同的相邻车道上在所述车辆的附近行驶的 邻近车辆的信息、和在所述邻近车辆的前方行驶的前方其他车辆的信息来作为所述车辆的 外界的信息的情况下,根据所述前方其他车辆与所述邻近车辆的车间距离、所述前方其他 车辆的速度以及所述邻近车辆的速度来确定能够进行所述车辆的车道变更的第一可能空 间; 在获取到在与所述车辆的行驶车道不同的相邻车道上在所述车辆的附近行驶的 邻近车辆的信息、和在所述邻近车辆的后方行驶的后方其他车辆的信息来作为所述车辆的 外界的信息的情况下,根据所述邻近车辆与所述后方其他车辆的车间距离、所述邻近车辆 的速度以及所述后方其他车辆的速度来确定能够进行所述车辆的车道变更的第二可能空 间;以及 对所确定的所述第一可能空间和所确定的所述第二可能空间进行评价, 在所述控制中,基于评价的结果,以进行朝向所述相邻车道的车道变更的方式对 所述车辆的行驶进行控制。 发明效果 6 CN 111731294 A 说 明 书 3/19 页 根据本发明,当存在多个能够进行车道变更的空间的情况下,能够以适当地进行 车道变更的方式对车辆的行驶进行控制。 附图说明 图1是表示车辆用控制装置的构成的图。 图2是表示控制单元的功能模块的图。 图3是用于对基于车道变更的向车辆间的进入动作进行说明的图。 图4是用于对基于车道变更的向车辆间的进入动作进行说明的图。 图5是表示加速度减速度的预测映射图的图。 图6是表示车道变更的处理的流程图。 图7是表示车道变更的处理的流程图。 图8是表示探索处理的流程图。 图9是表示探索处理的流程图。 图10是表示探索处理的流程图。 图11是用于对LC可能空间的评价进行说明的图。 图12是用于对LC可能空间的评价进行说明的图。 图13是表示车道变更的处理的流程图。 图14是表示后方其他车辆的意思推定的处理的流程图。 图15A是基于加速度减速度的预测映射图而用于对意思推定进行说明的图。 图15B是基于加速度减速度的预测映射图而用于对意思推定进行说明的图。 图15C是基于加速度减速度的预测映射图而用于对意思推定进行说明的图。 附图标记说明 1:车辆;2:控制单元;20、21、22、23、24、25、26、27、28、29:ECU;200:控制部。











