
技术摘要:
本发明属于动态障碍物检测技术领域,公开了一种动态障碍物检测方法、装置、电子设备及存储介质,所述方法包括:获取车辆行驶过程中采集的待处理图像及当前环境信息;根据当前环境信息对待处理图像进行图像增强处理,以获取增强图像;对增强图像进行背景差分处理,以获 全部
背景技术:
目前,自动驾驶汽车的前视摄像头对于动态障碍物的检测方法存在一些不足。其 一,低照明光、雨雾天等特殊工况经常出现,这类工况中的图像成像质量不一,而传统视觉 算法鲁棒性较差;其二,动态障碍物识别的对象复杂,对于行人而言,可将人进一步细分成 普通行人、打伞的人、骑自行车的人、骑摩托车的人,因此动态障碍物的运动状态差异较大。 在特殊工况中,若未能正确检测动态障碍物的类别和状态,并以此来放慢速度或设法绕开 避让,会出现严重的安全后果。 上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技 术。
技术实现要素:
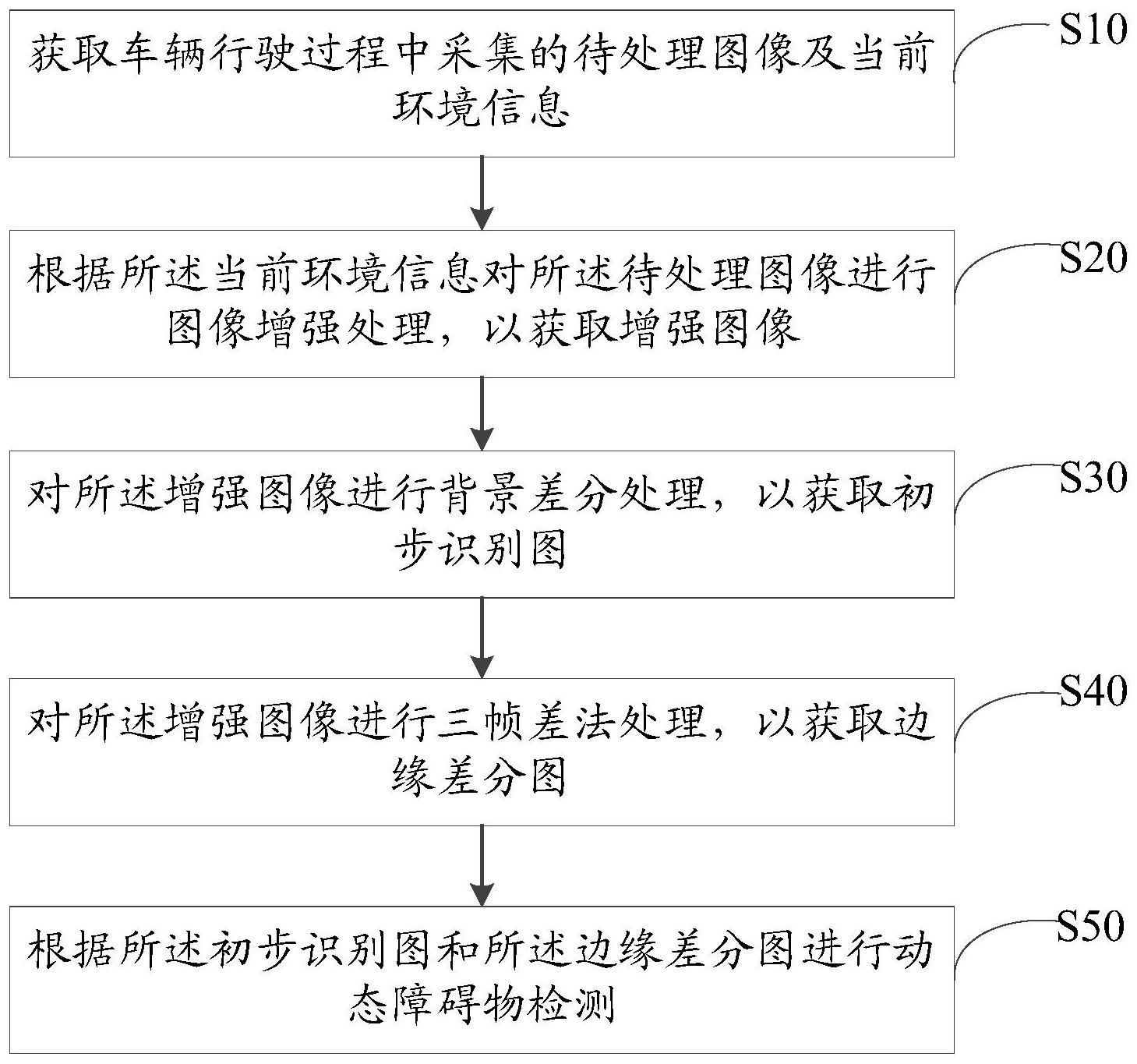
本发明的主要目的在于提供一种动态障碍物检测方法、装置、电子设备及存储介 质,旨在解决自动驾驶汽车前视摄像头动态障碍物检测的技术问题。 为实现上述目的,本发明提供了一种动态障碍物检测方法,所述方法包括: 获取车辆行驶过程中采集的待处理图像及当前环境信息; 根据所述当前环境信息对所述待处理图像进行图像增强处理,以获取增强图像; 对所述增强图像进行背景差分处理,以获取初步识别图; 对所述增强图像进行三帧差法处理,以获取边缘差分图; 根据所述初步识别图和所述边缘差分图进行动态障碍物检测。 优选地,所述根据所述当前环境信息对所述待处理图像进行图像增强处理,以获 取增强图像的步骤,具体包括: 将所述待处理图像转换为HSV空间模型中的待补偿图像; 根据当前环境信息获取环境照度补偿值; 根据所述环境照度补偿值对所述待补偿图像进行补偿,以获取补偿图像; 将所述补偿图像转换为RGB空间模型中的待恢复图像,并所述待恢复图像进行色 彩恢复,以获取增强图像。 优选地,所述根据所述环境照度补偿值对所述待补偿图像进行补偿,以获取补偿 图像的步骤,具体包括: 对所述待补偿图像进行饱和度线性补偿,并根据所述环境照度补偿值对所述待补 偿图像进行照度补偿,以获取补偿图像。 优选地,所述将所述补偿图像转换为RGB空间模型中的待恢复图像,并所述待恢复 图像进行色彩恢复,以获取增强图像的步骤,具体包括: 4 CN 111598010 A 说 明 书 2/8 页 将所述补偿图像转换为RGB空间模型的图像; 根据颜色恢复函数对转换后的补偿图像进行色彩恢复,以获取增强图像; 所述颜色恢复函数为: 其中,G为增益参数,a为色彩亮度调节因子,b为权重参数,Ii(x,y)为补偿图像中 每个像素值,Ci(x,y)为每个像素对应的恢复系数。 优选地,所述对所述增强图像进行背景差分处理,以获取初步识别图的步骤,具体 包括: 对所述增强图像进行帧间差分处理,以获取背景图像; 对所述背景图像进行差分运算,以获取运动目标图像; 对所述运动目标图像与当前增强图像进行差分运算,以获取初步识别图。 优选地,所述对所述增强图像进行三帧差法处理,以获取边缘差分图的步骤,具体 包括: 对所述增强图像的上一帧图像、所述增强图像的下一帧图像及所述增强图像进行 边缘检测,以获取对应的边缘图像; 对所述边缘图像进行差分处理,以获取第一差分图和第二差分图; 将所述第一差分图和所述第二差分图作为所述边缘差分图。 优选地,所述根据所述初步识别图和所述边缘差分图进行动态障碍物检测的步 骤,具体包括: 根据所述初步识别图和所述第一差分图进行逻辑或运算,以获取中期识别图; 根据所述中期识别图和所述第二差分图进行逻辑与运算,以获取动态障碍物图 像; 根据所述动态障碍物图像进行动态障碍物检测。 此外,为实现上述目的,本发明还提出一种动态障碍物检测装置,所述装置包括: 获取模块,用于获取车辆行驶过程中采集的待处理图像及当前环境信息; 增强处理模块,用于根据所述当前环境信息对所述待处理图像进行图像增强处 理,以获取增强图像; 差分处理模块,用于对所述增强图像进行背景差分处理,以获取初步识别图;还用 于对所述增强图像进行三帧差法处理,以获取边缘差分图; 逻辑计算模块,用于根据所述初步识别图和所述边缘差分图进行动态障碍物检 测。 此外,为实现上述目的,本发明还提出一种电子设备,所述电子设备包括:存储器、 处理器及存储在所述存储器上并可在所述处理器上运行的动态障碍物检测程序,所述动态 障碍物检测程序配置为实现如上所述的动态障碍物检测方法的步骤。 此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有动态 5 CN 111598010 A 说 明 书 3/8 页 障碍物检测程序,所述动态障碍物检测程序被处理器执行时实现如上所述的动态障碍物检 测方法的步骤。 本发明通过获取车辆行驶过程中采集的待处理图像及当前环境信息;根据所述当 前环境信息对所述待处理图像进行图像增强处理,以获取增强图像;对所述增强图像进行 背景差分处理,以获取初步识别图;对所述增强图像进行三帧差法处理,以获取边缘差分 图;根据所述初步识别图和所述边缘差分图进行动态障碍物检测。利用增强算法改善前视 摄像头检测动态障碍物的方法,通过RGB空间模型到HSV空间模型的转换,对图像进行增强 处理以克服特殊工况下的前视图像,并通过桢差法、背景差值法结合优化动态障碍物的检 测效果,从而进一步降低视觉算法的安全风险。并通过桢差法、背景差值法和边缘检测通过 逻辑运算的结合,从而优化了自动驾驶汽车前视摄像头动态障碍物检测效果,为自动驾驶 的后续路径规划和预警提供保障。 附图说明 图1是本发明实施例方案涉及的硬件运行环境的电子设备的结构示意图; 图2为本发明动态障碍物检测方法第一实施例的流程示意图; 图3为本发明动态障碍物检测方法第二实施例的流程示意图; 图4为本发明动态障碍物检测装置第一实施例的结构框图。 本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











