
技术摘要:
本发明公开了一种基于加权多维标度和拉格朗日乘子技术的运动辐射源TDOA和FDOA定位方法,首先利用多个运动传感器同时获得运动辐射源信号的TDOA观测量和FDOA观测量,并利用距离差观测量和距离差变化率观测量构造两个标量积矩阵,由此形成多维标度伪线性方程;然后定量分 全部
背景技术:
众所周知,辐射源定位技术在目标监测、导航遥测、地震勘测、射电天文、紧急救 助、安全管理等诸多工业和电子信息领域中发挥着重要作用。辐射源定位的基本过程就是 从电磁信号中提取出与其位置和速度有关的参数(也称为定位观测量),然后再利用这些参 数解算出辐射源位置向量和速度向量。用于辐射源定位的观测量涉及到空、时、频、能量等 多域参数,每个域的定位参数都有其特定的应用场景。在实际应用中,为了提高对辐射源的 定位精度,可以考虑联合多域观测量进行定位。联合TDOA/FDOA观测量对运动辐射源进行定 位是最常见的一种联合定位体制,其所适用的信号频段宽,并且具有较高的定位精度。 基于TDOA/FDOA观测方程的代数特征,国内外学者提出了很多性能优良的定位方 法,其中包括迭代类方法和解析类方法。解析类定位方法可以提供辐射源位置向量和速度 向量的闭式解,无需迭代运算,能够有效避免发散和局部收敛等问题,因而得到了学者们的 广泛青睐。近年来,在解析类定位方法中,相关学者提出了一种基于加权多维标度的TDOA/ FDOA定位方法(Wei H W ,Peng R ,Wan Q ,Chen Z X ,Ye S F .Multidimensional scaling analysis for passive moving target localization with TDOA and FDOA measurements[J] .IEEE Transactions on Signal Processing ,2010 ,58(3):1677- 1688.),该方法通过构造标量积矩阵获得了关于辐射源位置向量和速度向量的伪线性方 程,并由此给出了辐射源位置向量和速度向量的闭式解,能够取得较好的定位效果。然而, 该方法未利用增广未知向量所满足的二次等式约束,因此其定位精度并不是渐近最优的。 基于目前的研究现状,本发明公开了一种基于加权多维标度和拉格朗日乘子技术的运动辐 射源TDOA/FDOA定位方法。新方法充分考虑了增广未知向量服从的两个二次等式约束,将定 位问题转化成含有双二次等式约束的优化问题,并且利用拉格朗日乘子技术进行优化求 解,由此获得辐射源位置向量和速度向量的估计值。相比于已有的基于加权多维标度的 TDOA/FDOA定位方法,本专利公开的方法可以进一步提升对运动辐射源的定位精度。
技术实现要素:
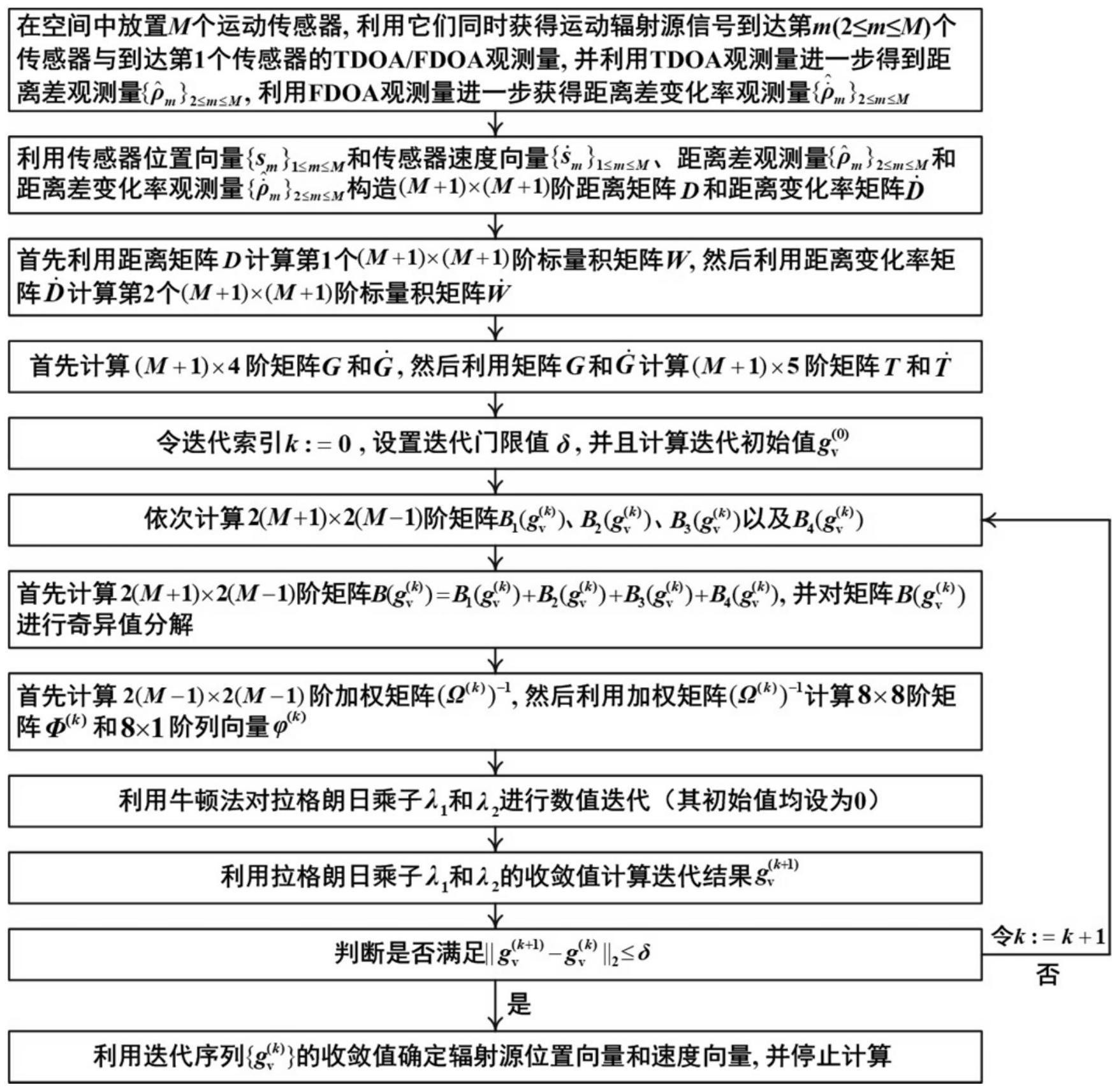
本发明针对现有的基于加权多维标度的TDOA/FDOA定位方法存在的定位精度差的 问题,提供了一种基于加权多维标度和拉格朗日乘子技术的运动辐射源TDOA和FDOA定位方 法,其能够充分利用增广未知向量所服从的两个二次等式约束,从而进一步提升对运动辐 射源的定位精度。 为了实现上述目的,本发明采用以下技术方案: 一种基于加权多维标度和拉格朗日乘子技术的运动辐射源TDOA和FDOA定位方法, 9 CN 111551895 A 说 明 书 2/17 页 包括: 步骤1:利用空间中放置的M个运动传感器同时获得运动辐射源信号到达第m个传 感器与到达第1个传感器的TDOA和FDOA观测量,并利用TDOA观测量进一步得到距离差观测 量 利用FDOA观测量进一步获得距离差变化率观测量 步骤2:利用传感器位置向量{sm}1≤m≤M和传感器速度向量 距离差观测量 和距离差变化率观测量 构造(M 1)×(M 1)阶距离矩阵D和距离变化率 矩阵 步骤3:首先利用距离矩阵D计算第1个(M 1)×(M 1)阶标量积矩阵W,然后利用距 离变化率矩阵 计算第2个(M 1)×(M 1)阶标量积矩阵 步骤4:首先利用传感器位置向量{sm}1≤m≤M和传感器速度向量 距离差观 测量 和距离差变化率观测量 构造(M 1)×4阶矩阵G和 然后利用矩阵 G和 计算(M 1)×5阶矩阵T和 步骤5:令迭代索引k:=0,设置迭代门限值δ,并且根据W、 T和 计算迭代初始 值 步骤6:根据 W、 G、 T和 依次计算2(M 1)×2(M-1) 阶矩阵 以及 步骤7:根据 以及 计算2(M 1)×2(M-1)阶矩阵 并对矩阵 进行奇异值分解; 步骤8:首先根据奇异值分解后的 计算2(M-1)×2(M-1)阶加权矩阵(Ω(k))-1, 然后利用加权矩阵(Ω(k))-1计算8×8阶矩阵Φ(k)和8×1阶列向量 步骤9:根据Φ(k)和 利用牛顿法对拉格朗日乘子λ1和λ2进行数值迭代,λ1和λ2 的初始值均设为0,得到λ1和λ2的收敛值; 步骤1 0 :利 用拉格朗日 乘子λ1 和λ2的收敛值计算迭代结果 若 则转至步骤11,否则更新迭代索引k:=k 1,并转至步骤6; 步骤11:利用迭代序列 的收敛值确定辐射源位置向量和速度向量。 进一步地,所述步骤1包括: 根据辐射源位置向量u和速度向量 第m个传感器的位置向量 和速度向量 获得运动辐射源信号到达第m个传感器与到达第 1个传感器的TDOA观测量 和FDOA观测量 将TDOA观测量 乘以信号传播速度得到距离差观测量 将FDOA观测量 先 10 CN 111551895 A 说 明 书 3/17 页 乘以信号传播速度再除以信号载波频率,然后将结果乘以-1得到距离差变化率观测量 相应的表达式分别为 式中εm1和εm2分别表示距离差观测误差和距离差变化率观测误差。 进一步地,所述步骤2包括: 利用传感器位置向量{s m} 1≤m≤M和传感器速度向量 距离差观测量 和距离差变化率观测量 构造(M 1)×(M 1)阶距离矩阵D和距离变化率矩 阵 相应的计算公式为 式中 进一步地,所述步骤3包括: 首先利用距离矩阵D计算第1个(M 1)×(M 1)阶标量积矩阵W,相应的计算公式为 然后利用距离变化率矩阵 计算第2个(M 1)×(M 1)阶标量积矩阵 相应的计 算公式为 式中 其中I M 1表示(M 1)× (M 1)阶单位矩阵; 1(M 1)×(M 1)表示(M 1)×(M 1)阶全1矩阵。 进一步地,所述步骤4包括: 首先计算(M 1)×4阶矩阵G和 相应的计算公式为 11 CN 111551895 A 说 明 书 4/17 页 式中1(M 1)×1表示(M 1)×1阶全1列向量; 然后利用矩阵G和 计算(M 1)×5阶矩阵T和 相应的计算公式为 式中O(M 1)×1表示(M 1)×1阶全0列向量; 进一步地,所述步骤5包括: 令迭代索引k:=0,设置迭代门限值δ,并且计算迭代初始值 相应的计算公式 为 式中 其中O(M 1)×4表示(M 1)×4阶全0矩阵;向量t1表示矩阵T中的第1列向量;矩阵T2表 示矩阵T中的第2至第5列构成的矩阵;向量 表示矩阵 中的第1列向量;矩阵 表示矩阵 中的第2至第5列构成的矩阵。 进一步地,所述步骤6包括: 按照如下公式依次计算2(M 1)×2(M-1)阶矩阵 以及 12 CN 111551895 A 说 明 书 5/17 页 式中O(M 1)×M表示(M 1)×M阶全0矩阵;其余表达式为 式中 其中IM-1表示(M-1)×(M-1)阶单位矩阵;IM表示M×M阶单位矩阵;I4表示4×4阶单 13 CN 111551895 A 说 明 书 6/17 页 位矩阵;1M×1表示M×1阶全1列向量;O4×4表示4×4阶全0矩阵;O1×M表示1×M阶全0行向量; O 1×(M - 1 )表示1× (M-1)阶全0行向量; 表示(M 1)× (M 1) 2阶全0矩阵; O(M-1)×(M-1)表示(M-1)×(M-1)阶全0矩阵;1(M 1)×(M-1)表示(M 1)×(M-1) 阶全1矩阵;1(M 1)×M表示(M 1)×M阶全1矩阵;1(M-1)×(M-1)表示(M-1)×(M-1)阶全1矩阵; 12×(M-1)表示2×(M-1)阶全1矩阵;O4(M 1)×(M-1)表示4(M 1)×(M-1)阶全0矩阵;O2×(M-1)表示2× (M-1)阶全0矩阵;O(M 1)×(M-1)表示(M 1)×(M-1)阶全0矩阵;O(M 1)×9表示(M 1)×9阶全0矩 阵。 进一步地,所述步骤7包括: 首先计算2(M 1)×2(M-1)阶矩阵 并对矩阵 进行奇异值分解可得 式中H(k)表示2(M 1)×2(M-1)阶列正交矩阵;V(k)表示2(M-1)×2(M-1)阶正交矩 阵;Σ(k)表示2(M-1)×2(M-1)阶对角矩阵,其对角元素为矩阵 的奇异值。 进一步地,所述步骤8包括: 首先计算加权矩阵(Ω(k))-1,其中矩阵Ω(k)的计算公式为 Ω(k)=Σ(k)V(k)TEV(k)Σ(k)T 式中 其中Ett表示距离差观测误差协方差矩阵;Eff表示距离差变 化率观测误差协方差矩阵;Etf表示距离差观测误差和距离差变化率观测误差之间的协方差 矩阵; 然后利用加权矩阵(Ω(k))-1计算8×8阶矩阵Φ(k)和8×1阶列向量 相应的计 算公式为 进一步地,所述步骤9包括: 利用牛顿法对拉格朗日乘子λ1和λ2进行数值迭代,它们的初始值均设为0,得到λ1 和λ2的收敛值 和 相应的迭代公式为 式中 和 分别表示λ1和λ2的第p 1次迭代结果; 和 分别表示λ1和λ2的 第p次迭代结果;α∈[0,1)表示步长因子;其余表达式为 14 CN 111551895 A 说 明 书 7/17 页 其中 15 CN 111551895 A 说 明 书 8/17 页 式中I3表示3×3阶单位矩阵;O3×1表示3×1阶全0列向量;O1×3表示1×3阶全0行向 量;O4×1表示4×1阶全0列向量;O1×4表示1×4阶全0行向量;O3×3表示3×3阶全0矩阵;O3×4表 示3×4阶全0矩阵;O4×3表示4×3阶全0矩阵;O5×1表示5×1阶全0列向量。 进一步地,所述步骤10包括: 利用拉格朗日乘子λ1和λ2的收敛值 和 计算迭代结果 相应的计算公式 为 若 则转至步骤11,否则更新迭代索引k:=k 1,并转至步骤6。 进一步地,所述步骤11包括: 利用迭代序列 的收敛值 确定辐射源位置向量和速度向量,将辐射源位置 向量和速度向量的估计结果分别记为 和 相应的计算公式为 与现有技术相比,本发明具有的有益效果: 本发明首先利用3维空间中的多个运动传感器同时获得运动辐射源信号的TDOA观 测量(等价于距离差观测量)和FDOA观测量(等价于距离差变化率观测量),并利用距离差观 测量和距离差变化率观测量构造两个标量积矩阵,由此形成多维标度伪线性方程;然后定 量分析TDOA/FDOA观测误差对伪线性方程的影响,从而确定最优加权矩阵;接着利用增广未 知向量的代数特征构造两个二次等式约束,并结合伪线性方程构建1个双二次等式约束加 权最小二乘优化模型。最后利用拉格朗日乘子技术对此模型进行数值优化,其中利用牛顿 迭代获得拉格朗日乘子的最优解,并进而得到辐射源位置向量和速度向量的估计值。本发 明基于加权多维标度原理,并在充分利用增广未知向量所满足的两个二次等式约束的基础 上,将TDOA/FDOA定位问题转化成含有双二次等式约束的优化模型,并且通过拉格朗日乘子 技术对该模型进行优化求解,相比已有的基于加权多维标度的TDOA/FDOA定位方法,本发明 利用了增广未知向量所满足的两个二次等式约束,能够进一步提升对运动辐射源的定位精 度。 附图说明 图1是本发明实施例一种基于加权多维标度和拉格朗日乘子技术的运动辐射源 TDOA和FDOA定位方法的基本流程图; 图2是定位结果散布图与定位误差椭圆曲线(X-Y坐标平面); 图3是定位结果散布图与定位误差椭圆曲线(Y-Z坐标平面); 16 CN 111551895 A 说 明 书 9/17 页 图4是辐射源位置估计均方根误差随着标准差σ的变化曲线; 图5是辐射源速度估计均方根误差随着标准差σ的变化曲线; 图6是辐射源位置估计均方根误差随着参数c的变化曲线; 图7是辐射源速度估计均方根误差随着参数c的变化曲线; 图8是辐射源位置估计均方根误差随着参数c的变化曲线(σ=1); 图9是辐射源速度估计均方根误差随着参数c的变化曲线(σ=1)。











