
技术摘要:
本申请公开了一种车辆信息处理方法、装置及计算机可读存储介质。具体实现方案为:在车辆位于第一定位二维码以及第二定位二维码之间的情况下,基于车辆的系统速度信息和实际速度信息,确定车辆是否处于打滑状态;在确定所述车辆处于打滑状态的情况下,基于实际速度信息 全部
背景技术:
潜伏式无人搬运机器人(Automated Guided Vehicle,AGV)是一种广泛应用于仓 储物流、工厂、零售等行业的用于代替人力提高效率的自动化搬运设备,可以被视为搬运车 辆。目前较为成熟的AGV导航定位方案主要有磁轨导航和地面二位码视觉导航两种,其中地 面二维码视觉导航经常利用里程计进行辅助定位。作为经历时间验证的AGV定位导航方案, 地面二维码导航拥有原理简单、导航精度高、稳定性尚佳、可维护性适中等优点。 同时,地面二维码导航也拥有一些很明显的缺点。地面二维码导航的位姿修正在 时间上是离散的,只有视觉传感器捕捉到了地面二维码后才可以进行位姿修正,相邻的地 面二维码之间的这片区域称之为位姿误差发散区域(发散区域)。AGV(车辆)位于发散区域 行驶时其位姿主要靠车辆自身里程计来进行推算,若发散区域中里程计推算的位姿偏差过 大或者发散距离中车轮相对地面发生打滑导致车辆推算位姿与实际位姿误差大于地面二 维码校准允许的误差范围,则车辆无法继续依赖地面二维码进行位姿修正,此时车辆位姿 处于“失控”状态只能依赖人工恢复。 如何设计与实现一种稳定有效的车辆位姿辅助定位方法,以便在车辆出现位置偏 移时,确定车辆的实际位置对于依赖二维码定位系统的车辆来讲有非常重要的意义。
技术实现要素:
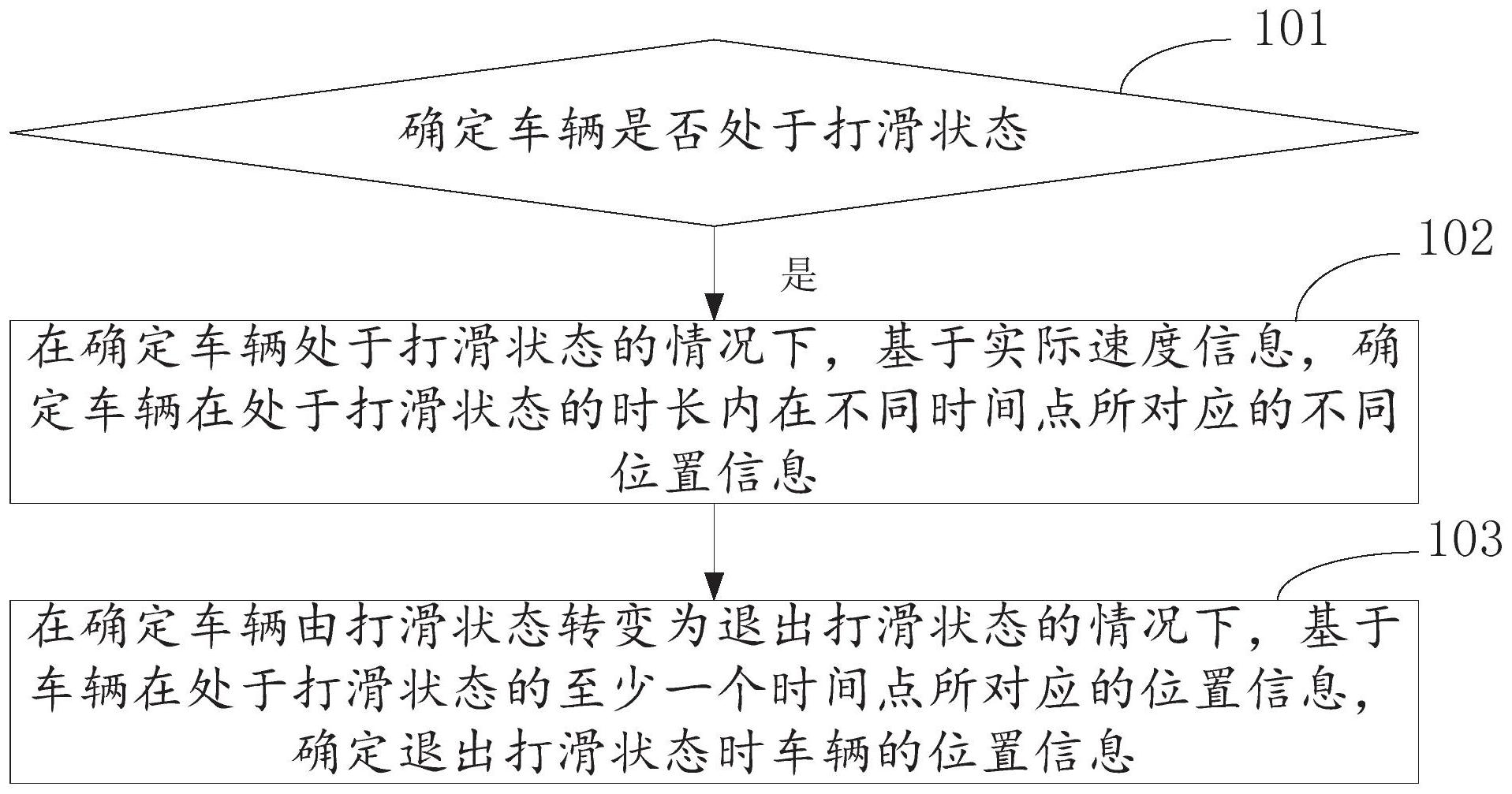
为了解决现有技术中上述至少一个问题,本申请实施例提供一种车辆信息处理方 法、装置及计算机可读存储介质。 第一方面,本申请实施例提供一种车辆信息处理方法,包括: 在车辆位于第一定位二维码以及第二定位二维码之间的情况下,基于车辆的系统 速度信息和实际速度信息,确定车辆是否处于打滑状态;其中,第一定位二维码和第二定位 二维码用于车辆的定位,并且第一定位二维码和第二定位二维码为车辆的行驶路径上相邻 的两个二维码; 在确定车辆处于打滑状态的情况下,基于实际速度信息,确定车辆处于打滑状态 的时长内在不同时间点所对应的不同位置信息; 在确定车辆由打滑状态转变为退出打滑状态的情况下,基于车辆处于打滑状态的 至少一个时间点所对应的位置信息,确定退出打滑状态时车辆的位置信息。 在一种实施方式中,基于实际速度信息,确定车辆处于打滑状态的时长内在不同 时间点所对应的不同位置信息,包括: 利用实际速度信息、车辆在处于打滑状态的时长内的上一时刻的位姿,推算车辆 在处于打滑状态的时长内的每个时间点的估计位姿; 6 CN 111597850 A 说 明 书 2/14 页 利用每个时间点的估计位姿,推算车辆在大地坐标系中每个坐标轴上的每个时间 点的线加速度分量; 利用每个时间点的线加速度分量,推算车辆在大地坐标系中每个坐标轴上的每个 时间点的速度分量和每个时间点的位置分量; 基于车辆处于打滑状态的时长内在不同时间点所对应的不同位置信息,确定退出 打滑状态的时间点对应的车辆的位置信息,包括: 根据退出打滑状态的前一时间点的位置分量,确定退出打滑状态的时间点的车辆 的位置信息。 在一种实施方式中,实际速度信息包括实际角速度和实际线加速度;利用实际速 度信息、车辆在处于打滑状态的时长内的上一时刻的位姿,推算车辆在处于打滑状态的时 长内的每个时间点的估计位姿,包括: 利用处于打滑状态的时长内的上一时间点的估计位姿、上一时间点的实际角速度 在车辆坐标系的Z轴的分量计算处于打滑状态的时长内的下一时间点的估计位姿。 在一种实施方式中,利用每个时间点的估计位姿,推算车辆在大地坐标系中每个 坐标轴上的每个时间点的线加速度分量,包括: 利用每个时间点的实际线加速度在车辆坐标系的X轴的分量、实际线加速度在车 辆坐标系的Y轴的分量以及估计位姿,计算每个时间点的线加速度在大地坐标系中X轴的分 量和Y轴的分量。 在一种实施方式中,利用每个时间点的线加速度分量,推算车辆在大地坐标系中 每个坐标轴上的每个时间点的线速度分量和每个时间点的位置分量,包括: 利用上一时间点的线加速度分量和上一时间点的速度分量,推算车辆在大地坐标 系中每个坐标轴上的下一时间点的线加速度分量; 利用上一时间点的估计位置、上一时间点的线加速度分量,推算车辆在大地坐标 系中每个坐标轴上的下一时间点的位置分量。 在一种实施方式中,实际速度信息包括实际角速度和实际线加速度;方法还包括: 在车辆静止状态下,多次获取传感器所检测的实际角速度零偏原始数据和实际线 加速度零偏原始数据; 计算实际角速度零偏原始数据的平均值和实际线加速度零偏原始数据的平均值; 根据实际角速度零偏原始数据的平均值和实际线加速度零偏原始数据的平均值, 获得实际角速度纠正值和实际线加速度纠正值;实际角速度纠正值和实际线加速度纠正 值,用于纠正实际角速度和实际线加速度。 在一种实施方式中,系统速度信息包括系统角速度和系统线加速度;实际速度信 息包括实际角速度和实际线加速度;确定车辆是否处于打滑状态,包括: 计算当前时间点对应的系统线加速度和实际线加速度的第一差值绝对值,以及当 前时间点对应的系统角速度和实际角速度的第二差值绝对值; 在第一差值绝对值达到第二阈值且第二差值绝对值达到第三阈值的情况下,计数 值加1; 在计数值达到设定第四阈值的情况下,判定车辆处于打滑状态; 在计数值未达到设定第四阈值的情况下,返回计算当前时间点对应的系统线加速 7 CN 111597850 A 说 明 书 3/14 页 度和实际线加速度的第一差值绝对值,以及当前时间点对应的系统角速度和实际角速度的 第二差值绝对值的步骤。 在一种实施方式中,确定车辆是否处于打滑状态,还包括: 计算当前时间点对应的系统线加速度和实际线加速度的第一差值绝对值,以及当 前时间点对应的系统角速度和实际角速度的第二差值绝对值; 在第一差值绝对值未达到第二阈值或第二差值绝对值达到第三阈值的情况下,计 数值加1; 在计数值达到设定第五阈值的情况下,判定车辆处于打滑状态; 在计数值未达到设定第五阈值的情况下,返回计算当前时间点对应的系统线加速 度和实际线加速度的第一差值绝对值,以及当前时间点对应的系统角速度和实际角速度的 第二差值绝对值的步骤。 第二方面,本申请实施例提供一种车辆信息处理装置,包括: 打滑判断模块:用于在车辆位于第一定位二维码以及第二定位二维码之间的情况 下,基于车辆的系统速度信息和实际速度信息,确定车辆是否处于打滑状态;其中,第一定 位二维码和第二定位二维码用于车辆的定位,并且第一定位二维码和第二定位二维码为车 辆的行驶路径上相邻的两个二维码; 第一位置信息确定模块:用于在确定车辆处于打滑状态的情况下,基于实际速度 信息,确定车辆处于打滑状态的时长内在不同时间点所对应的不同位置信息; 第二位置信息确定模块:用于在确定车辆由打滑状态转变为退出打滑状态的情况 下,基于车辆处于打滑状态的至少一个时间点所对应的位置信息,确定退出打滑状态时车 辆的位置信息。 在一种实施方式中,第一位置信息确定模块包括: 第一推算单元:用于利用实际速度信息、车辆在处于打滑状态的时长内的上一时 刻的位姿,推算车辆在处于打滑状态的时长内的每个时间点的估计位姿; 第二推算单元:用于利用每个时间点的估计位姿,推算车辆在大地坐标系中每个 坐标轴上的每个时间点的线加速度分量; 第三推算单元:用于利用每个时间点的线加速度分量,推算车辆在大地坐标系中 每个坐标轴上的每个时间点的速度分量和每个时间点的位置分量; 第二位置信息确定模块包括: 第四推算单元:用于根据退出打滑状态的前一时间点的位置分量,确定退出打滑 状态的时间点的车辆的位置信息。 在一种实施方式中,实际速度信息包括实际角速度和实际线加速度;第一推算单 元还用于: 利用处于打滑状态的时长内的上一时间点的估计位姿、上一时间点的实际角速度 在车辆坐标系的Z轴的分量计算处于打滑状态的时长内的下一时间点的估计位姿。 在一种实施方式中,第二推算单元还用于: 利用每个时间点的实际线加速度在车辆坐标系的X轴的分量、实际线加速度在车 辆坐标系的Y轴的分量以及估计位姿,计算每个时间点的线加速度在大地坐标系中X轴的分 量和Y轴的分量。 8 CN 111597850 A 说 明 书 4/14 页 在一种实施方式中,第三推算单元还用于: 利用上一时间点的线加速度分量和上一时间点的速度分量,推算车辆在大地坐标 系中每个坐标轴上的下一时间点的线加速度分量; 利用上一时间点的估计位置、上一时间点的线加速度分量,推算车辆在大地坐标 系中每个坐标轴上的下一时间点的位置分量。 在一种实施方式中,实际速度信息包括实际角速度和实际线加速度;装置还包括: 零偏原始数据获得模块:用于在车辆静止状态下,多次获取传感器所检测的实际 角速度零偏原始数据和实际线加速度零偏原始数据; 零偏原始数据计算模块:用于计算实际角速度零偏原始数据的平均值和实际线加 速度零偏原始数据的平均值; 纠正值计算模块:用于根据实际角速度零偏原始数据的平均值和实际线加速度零 偏原始数据的平均值,获得实际角速度纠正值和实际线加速度纠正值;实际角速度纠正值 和实际线加速度纠正值,用于纠正实际角速度和实际线加速度。 在一种实施方式中,系统速度信息包括系统角速度和系统线加速度;实际速度信 息包括实际角速度和实际线加速度;打滑判断模块还包括: 第一计算单元:用于计算当前时间点对应的系统线加速度和实际线加速度的第一 差值绝对值,以及当前时间点对应的系统角速度和实际角速度的第二差值绝对值; 第二计算单元:用于在第一差值绝对值达到第二阈值且第二差值绝对值达到第三 阈值的情况下,计数值加1; 打滑判定单元:用于在计数值达到设定第四阈值的情况下,判定车辆处于打滑状 态; 第一返回单元:用于在计数值未达到设定第四阈值的情况下,触发第一计算单元。 在一种实施方式中,打滑判断模块还包括: 第三计算单元:用于计算当前时间点对应的系统线加速度和实际线加速度的第一 差值绝对值,以及当前时间点对应的系统角速度和实际角速度的第二差值绝对值; 第四计算单元:用于在第一差值绝对值未达到第二阈值或第二差值绝对值达到第 三阈值的情况下,计数值加1; 退出打滑判定单元:用于在计数值达到设定第五阈值的情况下,判定车辆退出打 滑状态; 第二返回单元:用于在计数值未达到设定第五阈值的情况下,触发第三计算单元。 第三方面,本申请实施例提供一种电子设备,包括: 至少一个处理器;以及 与所述至少一个处理器通信连接的存储器;其中, 所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一 个处理器执行,以使所述至少一个处理器能够执行本申请任意一项实施例提供的方法。 第四方面,本申请实施例提供一种存储有计算机指令的非瞬时计算机可读存储介 质,其特征在于,所述计算机指令用于使所述计算机执行本申请任意一项实施例所提供的 方法。 上述申请中的一个实施例具有如下优点或有益效果:能够利用车辆系统测量获得 9 CN 111597850 A 说 明 书 5/14 页 的系统速度信息,和车辆的传感器获得的实际速度信息,判断车辆是否进入打滑状态,能准 确确定车辆是否处于打滑状态以及确定车辆位置。从而避免了现有技术中,使用定位二维 码进行定位,导致车辆在打滑状态下偏移既定路线时无法及时确定车辆位置的情况,从而 能够及时准确掌握车辆在打滑状态时的位置。 上述可选方式所具有的其他效果将在下文中结合具体实施例加以说明。 附图说明 附图用于更好地理解本方案,不构成对本申请的限定。其中: 图1是根据本申请一实施例的车辆信息处理方法流程示意图; 图2是根据本申请另一实施例的车辆信息处理方法的流程示意图; 图3是根据本申请另一实施例的车辆信息处理方法的流程示意图; 图4是根据本申请另一实施例的车辆信息处理方法的流程示意图; 图5是根据本申请另一实施例的车辆信息处理装置的结构示意图; 图6是用来实现本申请实施例的车辆信息处理方法的电子设备的框图。











