
技术摘要:
本发明涉及一种基于无人驾驶车辆的智能交叉路口管理方法,包括如下步骤:步骤1:对交叉路口、路口控制策略、无人驾驶车辆提出假设;步骤2:定义通信的消息类型及车辆允许执行的操作;步骤3:根据车辆的行驶信息,及其到达交叉路口的时间计算优先级;步骤4:通过车辆信 全部
背景技术:
交叉路口的管理是交通控制中最具有挑战性的任务之一,目前交叉路口都是由停 车标志或者红绿灯管理。然而随着越来越多的车辆涌入城市交通流,交通灯策略的弊端开 始显现。在很多情况下,即使交叉路口内没有车辆,红绿灯策略也会要求车辆在交叉路口边 缘等待,导致了频繁的交通堵塞,严重影响了城市的生产力和居民的生活质量,同时造成了 大量的经济损失。随着人工智能、视觉计算、无线通信技术等研究的飞速发展,无人驾驶技 术越来越成熟,无人驾驶和智能交通系统(ITS)成为人们关注的热点话题之一。无人驾驶车 辆的优势在于,它们可以相互协作、协调,也可以与交叉路口的控制器进行交互,为智能交 叉路口管理开辟了可能。在不久的将来,无人驾驶和ITS技术迈向成熟,无人驾驶接近全面 实现时,交通方式将会发生历史性的改革,低效的红绿灯机制极有可能被其他控制策略取 代。目前已有许多研究者预见这一未来并提出了很多智能的控制策略,仿真实验也证明了 这些控制策略相对红绿灯机制的高效性。然而现有的控制策略存在不能实时控制、模型不 够优化等问题,因此本发明提出了更加优化、高效的智能控制协议IICP。
技术实现要素:
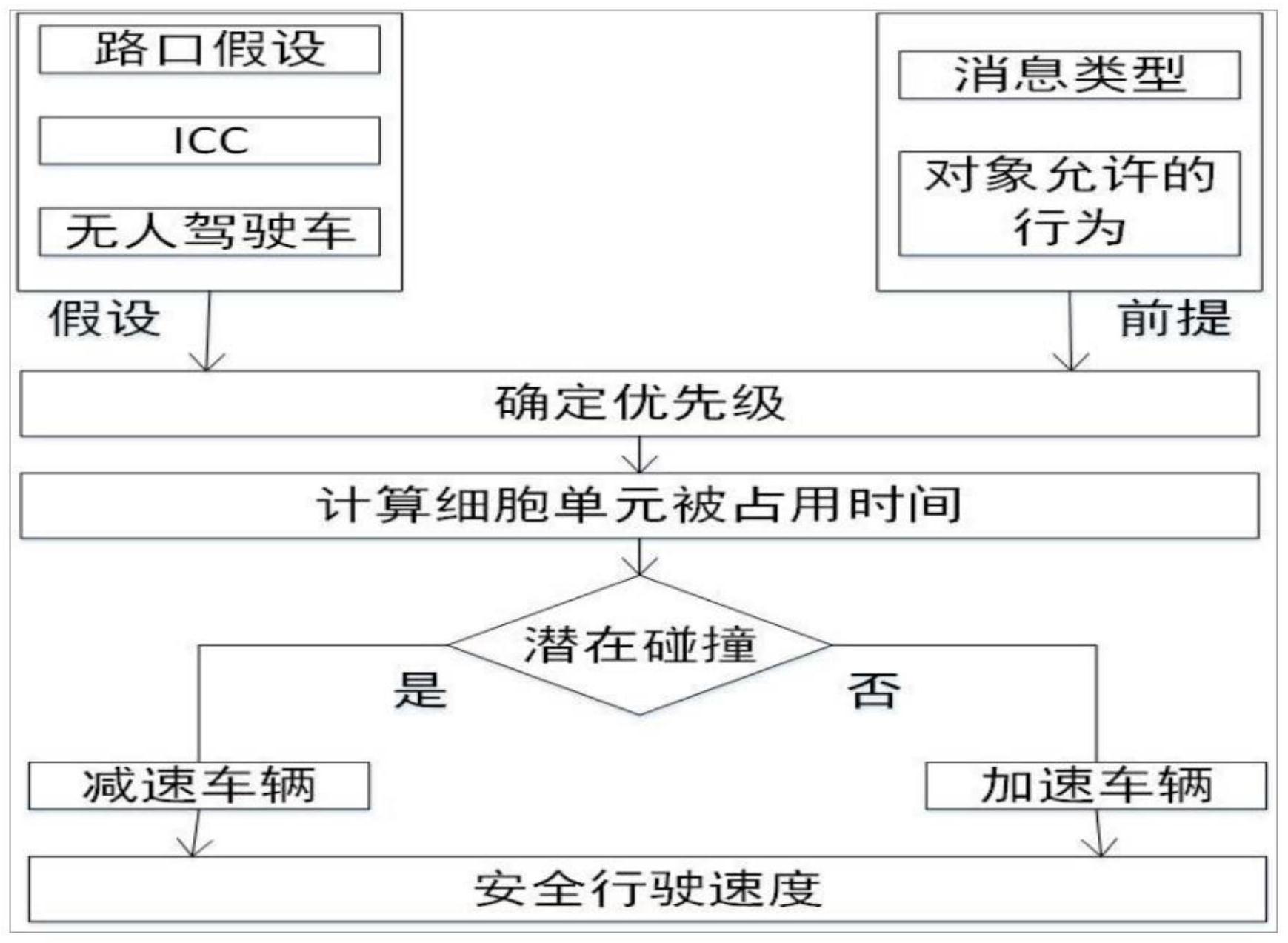
本发明要解决的问题是:提供一种用于管理无人驾驶车辆在交叉路口通行的基于 V2I通信、序列化调度方式的智能管理方法,该方法能够极大程度的减少车辆在路口的等待 时间。 本发明的技术方案:用于管理无人驾驶车辆在交叉路口通行的基于V2I通信、序列 化调度方式的智能管理方法,含有如下步骤(如图2所示): 步骤1、协议假设:对交叉路口、路口控制策略、无人驾驶车辆提出假设。 步骤2、消息类型及对象动作:定义多种消息通讯类型及协议中对象允许执行的动 作。 步骤3、车辆优先级确定:根据Adjust区域无人驾驶车辆到达交叉路口的先后顺 序,采用FCFS规则为其确定优先级。 步骤4、车辆速度调整:通过Conflict区域、Adjust区域车辆信息,ICC首先计算交 叉路口内每个细胞单元被占用的时间段,再按照步骤3生成的优先级顺序依次为每辆车检 测潜在的碰撞情况,提供加速、减速的速度调整策略,为车辆提供安全行驶速度。 本发明中,所述V2I通信是指:车辆和ICC之间的通信,用于车辆及ICC交互信息。 1.优选地,步骤1中的交叉路口假设是指:将交叉路口建模为由多个细胞单元组成 的网格,每个细胞单元能够容纳一辆无人驾驶车辆,为计算细胞占用时间做准备;同时根据 道路上距离交叉路口的距离,把道路划分为Outside区域、Adjust区域、Conflict区域、Exit 3 CN 111583673 A 说 明 书 2/5 页 区域(如图1所示)。 步骤1中路口控制策略假设是指:引入智能控制中心(ICC),其具有无线通信、强大 计算能力等功能,并取代红绿灯管理无人驾驶车辆在交叉路口通行。 步骤1中的无人驾驶车辆假设是指:所有车辆都是无人驾驶车辆,且装配有传感 器、无线通信、定位系统等装置,能够感知一定范围内的障碍物、进行无线通讯、以及获取精 准的定位信息等功能。 优选地,步骤2中的消息类型是指:通过定义车辆行驶信息、确认信息、返回信息、 离开信息等消息类型,确保车辆和ICC之间通信时,能够将所有必要的信息发送至对方。 步骤2中的对象允许的动作是指:定义ICC和无人驾驶车辆允许执行、必须执行的 动作,从而保证协议的安全性。 优选地,步骤3中的车辆优先级确定是指:通过Adjust区域无人驾驶车辆发送的车 辆信息,ICC计算其到达路口边缘的时间,通过FCFS策略确定其优先级。 优选地,步骤4的车辆速度调整是指:通过Conflict区域、Adjust区域车辆信息, ICC首先计算交叉路口内每个细胞单元被占用的时间段,再按照步骤3生成的优先级顺序依 次为每辆车检测潜在的碰撞情况,提供加速、减速的速度调整策略,为车辆提供安全行驶速 度。 本发明的有益效果: 本发明为用于管理无人驾驶车辆在交叉路口通行的、基于V2I通信、序列化调度方 式的智能管理协议,针对红绿灯控制方式效率低下的问题,以智能控制中心取代红绿灯,提 出了一个基于优先级的车辆通行协议,该协议通过确定接近交叉路口的车辆的优先级,再 调整其车速的方式实现车辆高效、安全的通过交叉路口。相对于红绿灯控制策略本发明能 够大大减少车辆在交叉路口的等待时间,提高交叉路口资源利用率,进而提高城市交通水 平;同时,完全采用无人驾驶方式能够避免司机的误操作、驾驶水平等因素对城市交通系统 安全性的影响。 附图说明 通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通 技术人员将变得更加清楚明了。在附图中: 图1为本发明方法流程示意图; 图2为基于V2I通信、序列化调度方式的IICP协议,车辆通过交叉路口的流程示意 图; 图3为无人驾驶车辆在交叉路口通行示意图; 图4为无人驾驶车辆占用各个细胞单元的时间段示意图; 图5为SUMO配置示意图; 图6为车辆信息配置示意图; 图7为仿真实验中车速调整示意图; 图8为仿真实验结果图。 4 CN 111583673 A 说 明 书 3/5 页











