
技术摘要:
本发明涉及电动机控制装置、初始位置推定方法及图像形成装置。在电动机控制装置中,驱动电路(40)在推定电动机(30)的转子的磁极的初始位置时,依次变更多个通电角度并针对每个通电角度,以转子不旋转的电平的电压值以及通电电时间连续地或者间歇地向定子绕组(31)施加电 全部
背景技术:
在无传感器方式的无刷DC电动机中,不存在检测转子的永磁铁相对于定子的各相 线圈的磁极位置的传感器。因此,一般进行基于在启动电动机前,以规定的电角对定子进行 通电,将转子的磁极吸引到与通电的电角(以下,也称为通电角度)对应的位置之后再使电 动机的旋转开始。 然而,在进行转子的吸引时,由于转子从最大偏离±180°的状态被吸引,所以转子 有时较大地振动。在这样的情况下,需要等待直到振动到能够启动的电平为止。 另外,在启动电动机前不能允许转子运动的应用中,不能够采用转子的吸引的方 法。例如在电子照相方式的图像形成装置中,纸张输送用的供纸电动机采用无刷DC电动机 的情况下,为了用于磁极的初始位置推定,而不能够采用转子吸引的方法。是因为若在电动 机启动前转子运动,则伴随于此送出纸张,成为卡纸的原因。 因此,作为不进行转子的吸引,而推定处于静止状态的转子的磁极位置的方法,已 知电感式感测的方法(例如,参照专利第2547778号公报)。该初始位置推定方法利用在以多 个电角向定子绕组施加转子不旋转的电平的电压时,根据转子的磁极位置与由定子绕组产 生的电流磁场的位置关系,有效的电感微妙地变化的性质。具体地,根据专利第2547778号 公报,在各电角下以一定的通电时间向定子绕组施加电压时,表示最高的电流值的情况下 的通电角度显示出转子的磁极的位置。 基于电感式感测的初始位置推定方法例如利用磁饱和现象。在使定子电流流向与 转子的磁极的方向对应的d轴向的情况下,由转子的永磁铁产生的磁通和由电流产生的磁 通相加。由此,由于产生磁饱和,所以电感降低,能够通过定子电流的变化来检测电感的降 低。另外,在永磁铁嵌入型(IPM:Interior Permanent Magnet)电动机的情况下,产生q轴向 的电感大于d轴向的电感的凸极性。因此,此时,即使没有产生磁饱和,在d轴电流的情况下, 有效的电感也降低。 上述的初始位置推定方法的问题点之一在于较大地取决于电动机的构造以及特 性这点。这是因为根据电动机的构造,由于有效的电感的变化较小,所以定子电流基本不根 据通电角度而变化,或检测定子电流的峰值的情况下的通电角度未显示出转子的磁极位置 (详细而言,在实施方式中进行说明)。 具体地,在利用磁饱和现象的情况下,需要将施加电压以及施加时间设定为至少 在使d轴电流流动的情况下产生磁饱和的电平。这是因为在几乎不产生磁饱和的电平下,获 得最大的电流值的通电角度从磁极位置偏离,或无法获得足够的SN(Signal-to-Noise,信 噪比)比。然而,近年来,为了电动机的效率提高,由于难以磁饱和的电动机变多,所以较难 5 CN 111585494 A 说 明 书 2/23 页 精度良好地进行初始位置推定。 另一方面,若为了显著地降低电感,而过度增大施加电压以及施加时间,则产生转 子运动这个问题。其结果可能有产生检测误差、或启动失败的情况。 在这一点上特别成为问题是内转子型电动机的情况(但是本发明并不限于内转子 型电动机)。内转子型电动机由于惯性较小所以在频繁地反复电动机的启动以及停止的用 途等中是有利的。然而,在通过电感式感测方式进行初始位置推定的情况下,若如内转子型 电动机那样惯性较小,则存在在初始位置推定时由于流向定子绕组的电流而转子容易运动 这个问题。
技术实现要素:
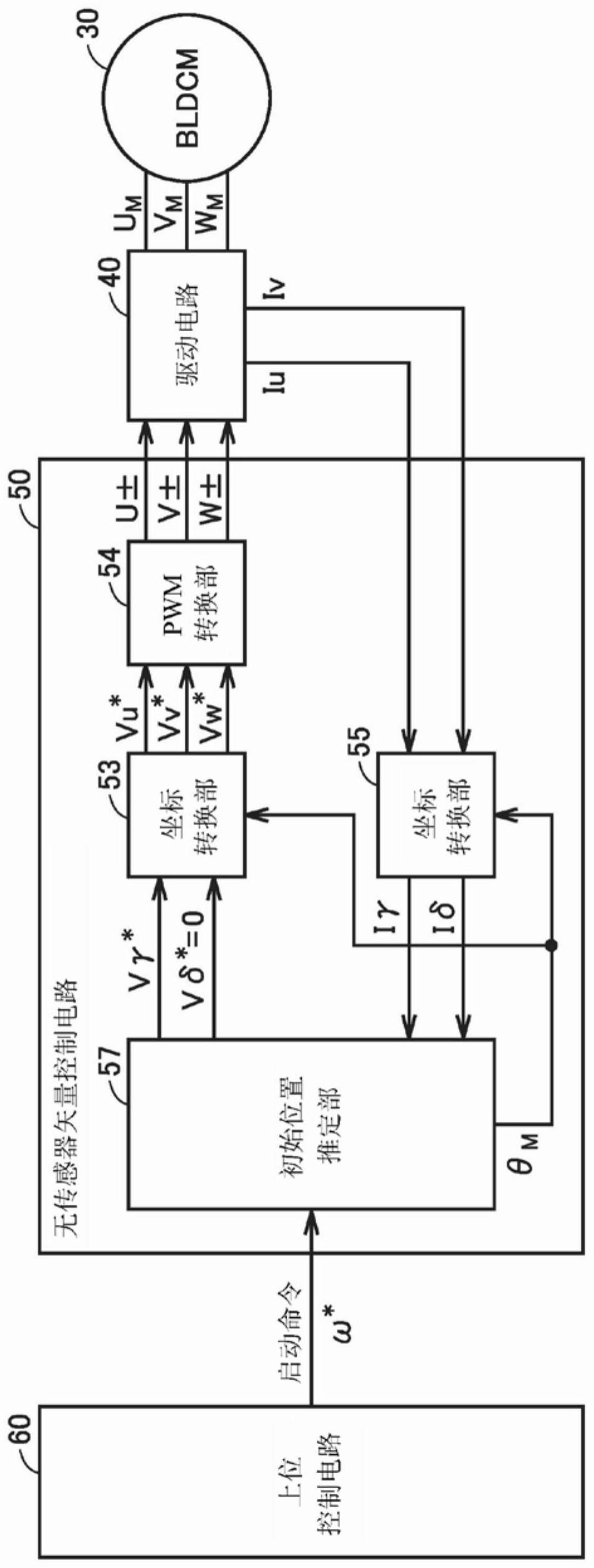
本发明考虑到电感式感测方式中的上述的问题点。本发明的目的之一在于在由多 相的电压驱动的无传感器方式的电动机中进行基于电感式感测方式的磁极的初始位置推 定时,即使是比较小的施加电压以及施加时间,也能够精度良好地推定转子的磁极的初始 位置。本发明的其它课题以及特征在实施方式中是清楚的。 根据本发明的一个方面的电动机控制装置用于控制无传感器方式的电动机,具备 用于向电动机的多相的定子绕组施加电压的驱动电路、和控制驱动电路的控制部。控制部 构成为在通过电感式感测方式推定电动机的转子的初始磁极位置时,(i)依次变更多个通 电角度,并针对每个通电角度,以转子不旋转的电平的电压值以及通电时间通过驱动电路 连续地或者间歇地向定子绕组施加电压,(ii)将针对每个通电角度得到的在定子绕组中流 过的多相的电流的峰值转换为具有与通电角度相同的电角的第一电流成分、和与第一电流 成分相差90度的电角的第二电流成分,(iii)基于通过三角函数曲线对第一电流成分相对 于多个通电角度的变化量进行近似的情况下的三角函数曲线的相位角来推定转子的初始 磁极位置。上述的三角函数曲线具有与电动机的电角的1周期相等的周期。 优选,推定出的初始磁极位置与三角函数曲线具有最大值时的通电角度对应。 优选,基于三角函数曲线的相位角来推定转子的初始磁极位置包括:针对每个通 电角度,将第一电流成分的值和通电角度的余弦值相乘,并求出针对多个通电角度得到的 相乘结果的总和,来求出第一积分值;针对每个通电角度,将第一电流成分的值和通电角度 的正弦值相乘,并求出针对多个通电角度得到的相乘结果的总和,来计算第二积分值;以及 基于第一积分值与第二积分值之比来计算相位角。 优选,上述的计算相位角包括基于第一积分值与第二积分值之比的反正切来计算 相位角。 在本发明的另一方面中,提供无传感器方式的电动机的转子的磁极的初始位置推 定方法。转子的磁极的初始位置推定方法具备:依次变更多个通电角度,并针对每个通电角 度,以转子不旋转的电平的电压值以及通电时间连续地或者间歇地向多相的定子绕组施加 电压的步骤;针对每个通电角度,将在定子绕组中流过的多相的电流的峰值转换为具有与 通电角度相同的电角的第一电流成分、和与第一电流成分相差90度的电角的第二电流成分 的步骤;以及基于利用三角函数曲线对第一电流成分相对于多个通电角度的变化量进行近 似的情况下的三角函数曲线的相位角,来推定转子的磁极的初始位置的步骤。上述的三角 函数曲线具有与电动机的电角的1周期相等的周期。 6 CN 111585494 A 说 明 书 3/23 页 优选,推定出的磁极的初始位置与三角函数曲线具有最大值时的通电角度对应。 优选,推定转子的磁极的初始位置的步骤包括:针对每个通电角度,将第一电流成 分的值和通电角度的余弦值相乘,并求出针对多个通电角度得到的相乘结果的总和,来计 算第一积分值的步骤;针对每个通电角度,将第一电流成分的值和通电角度的正弦值相乘, 并求出针对多个通电角度得到的相乘结果的总和,来计算第二积分值的步骤;以及基于第 一积分值与第二积分值之比来计算相位角的步骤。 优选,计算相位角的步骤包括计算第一积分值与第二积分值之比的反正切的步 骤。 优选,转子的磁极的初始位置推定方法还具备决定与将电动机的电角的1周期等 分割成L个区间的情况相当的L个通电角度,作为多个通电角度的步骤。决定L个通电角度的 步骤包括:决定基于推定出的磁极的初始位置所包括的重叠失真的误差的最大允许量[度] 的步骤;以及决定L,以使得根据针对于多个通电角度的第一电流成分的波形求出的傅里叶 级数成分中第(L-1)次成分的振幅相对于第一次成分的振幅的比例[%]为最大允许量的 1.67倍以下的步骤。 优选,转子的磁极的初始位置推定方法还具备:在通过使电流流向定子绕组而将 转子吸引到预先设定的多个校准用电角的每个校准用电角的状态下,推定转子的磁极的初 始位置,从而预先求出多个校准用电角与每个对应的转子的磁极的多个推定初始位置的偏 差的步骤;以及基于预先求出的多个推定初始位置与每个对应的偏差的关系,对新求出的 转子的磁极的推定初始位置进行修正的步骤。 优选,对推定初始位置进行修正的步骤包括通过利用了预先求出的多个推定初始 位置与每个对应的偏差的关系的插值处理,来计算与新求出的转子的磁极的推定初始位置 对应的偏差的步骤。 或,对推定初始位置进行修正的步骤包括使用基于预先求出的多个推定初始位置 与每个对应的偏差的关系的多项式近似曲线,来计算与新求出的转子的磁极的推定初始位 置对应的偏差的步骤。 优选,在制造搭载有电动机的产品时、向用户目的地设置产品时以及更换搭载在 产品中的电动机时中的至少一个时刻执行预先求出偏差的步骤。 优选,在使用多个辊从供纸盒取出纸张并进行输送,且在输送来的纸张上形成图 像的图像形成装置中,电动机用于驱动多个辊的各个辊。多个辊包括:第一辊,在纸张被辊 隙部夹持的状态下停止;第二辊,在纸张抵碰在辊隙部的入口的状态下停止;以及多个第三 辊,在纸张被辊隙部夹持的状态以及纸张抵碰在辊隙部的入口的状态的任何一个状态下都 不停止。对用于驱动第一辊以及第二辊的各个辊的电动机执行对推定初始位置进行修正的 步骤。 优选,对用于驱动多个第三辊的各个辊的电动机不执行对推定初始位置进行修正 的步骤。 或,针对用于驱动多个第三辊的各个辊的电动机,根据各第三辊的直径、各第三辊 与驱动各第三辊的电动机之间的减速比、以及驱动各第三辊的电动机的极对数中的至少一 个,存在执行对推定初始位置进行修正的步骤的情况和不执行对推定初始位置进行修正的 步骤的情况。 7 CN 111585494 A 说 明 书 4/23 页 优选,仅在将第三辊的直径除以减速比和极对数的积而得的值为基准值以上的情 况下,执行对推定初始位置进行修正的步骤。 优选,在所述图像形成装置的电源被接通后到为了进行所述纸张的输送而进行电 动机的启动为止的期间,执行预先求出偏差的步骤。 在本发明的又一方面中,提供使用多个辊从供纸盒输送纸张并在输送来的纸张上 形成图像的图像形成装置。图像形成装置具备对驱动多个辊的至少一个辊的电动机进行控 制的上述电动机控制装置。 根据本发明的电动机控制装置以及转子的磁极的初始位置推定方法,在无传感器 方式的电动机中进行基于电感式感测方式的磁极的初始位置推定时,即使是比较小的施加 电压以及施加时间,也能够精度良好地推定磁极的初始位置。 本发明的上述以及其它目的、特征、局面以及优点根据与附图关联地理解的与本 发明有关的接下来的详细说明将会更加明确。 附图说明 图1是表示电动机控制装置的整体结构的框图。 图2是表示从使稳态运转中的电动机停止到再启动为止的电动机旋转速度的时序 图。 图3是用于对用于显示无传感器矢量控制中的交流电流以及磁极位置的坐标轴进 行说明的图。 图4是表示无传感器矢量控制电路的动作的功能框图。 图5是从图4提取与处于静止状态的转子的磁极的初始位置推定有关的部分而示 出的功能框图。 图6是表示U相电压指令值、V相电压指令值以及W相电压指令值与电角的关系的 图。 图7是示意性地表示γ轴电压指令值与检测到的γ轴电流的关系的一个例子的时 序图。 图8的(a)、(b)是表示转子的磁极位置与通电角度的相对的位置关系、以及γ轴电 流的峰值的关系的图。 图9的(a)、(b)是表示通过电感式感测方式检测的γ轴电流的峰值的实测例子的 图。 图10的(a)、(b)表示通过电感式感测方式检测的γ轴电流的峰值的其它的实测例 子的图。 图11是表示图5的初始位置推定部的动作的功能框图。 图12是表示由初始位置推定部中使用的三角函数表的一个例子的图。 图13是表示在图10的(a)的实测例子中,基于本实施方式的初始位置推定的结果 的一个例子的图。 图14是表示图5的初始位置推定部的动作的一个例子的流程图。 图15是表示储存通电角度以及对应的余弦值以及正弦值的表的一个例子的图。 图16是表示将图10的(a)所示的γ轴电流的峰值的波形进行傅里叶级数展开的结 8 CN 111585494 A 说 明 书 5/23 页 果的图。 图17是表示第(L-1)次成分的振幅相对于第一次成分的振幅的比例、与初始磁极 位置的误差的绝对值的关系的图。 图18的(a)、(b)是表示磁极位置的推定结果的一个例子的图。 图19是表示在实施方式2的电动机控制方法中推定转子的磁极的初始位置的顺序 的流程图。 图20是表示校准数据的创建顺序的流程图。 图21是表示图像形成装置的结构的一个例子的剖视图。 图22是表示在图21的图像形成装置中,用于各种辊的驱动控制的电动机和该控制 装置的结构的框图。 图23是用于对创建校准数据的定时进行说明的流程图。 图24是用于对断开图像形成装置的电源后执行校准数据的创建的定时进行说明 的流程图。











