
技术摘要:
本公开涉及一种自行车控制系统。具有能够独立于曲柄驱动牙盘的电动踏板辅助马达的自行车包括车轮速度传感器和曲柄节奏传感器。车轮速度传感器和曲柄节奏传感器分别测量车轮速度和曲柄节奏,并将所测量的车轮速度和曲柄节奏提供给自行车的控制器。控制器基于所测量的车 全部
背景技术:
具有踏板辅助电动马达的自行车(例如,电动自行车或电动车)可以包括车轮速度 传感器和曲柄速度传感器,这些传感器可以用作自行车的变速器的自动换挡算法的输入。 用于自行车的变速器的自动换挡算法的一个限制是,仅可在传动系移动时(例如,当骑手在 踩踏时)发生换挡。 踏板辅助马达可独立于自行车的曲柄来转动驱动牙盘。存在这个方面,使得当辅 助马达作用时,如果骑手比辅助马达可作出反应更快地减慢踩踏速率,则骑手不会在骑手 的腿中感测到马达扭矩。在一些电动自行车系统中,该功能被用作这样的特征,其中骑手可 以在电动自行车旁边行走并且可以推动按钮以使马达能够以低速辅助,从而帮助推动电动 自行车上陡坡,而曲柄和踏板不会不安全地旋转。
技术实现要素:
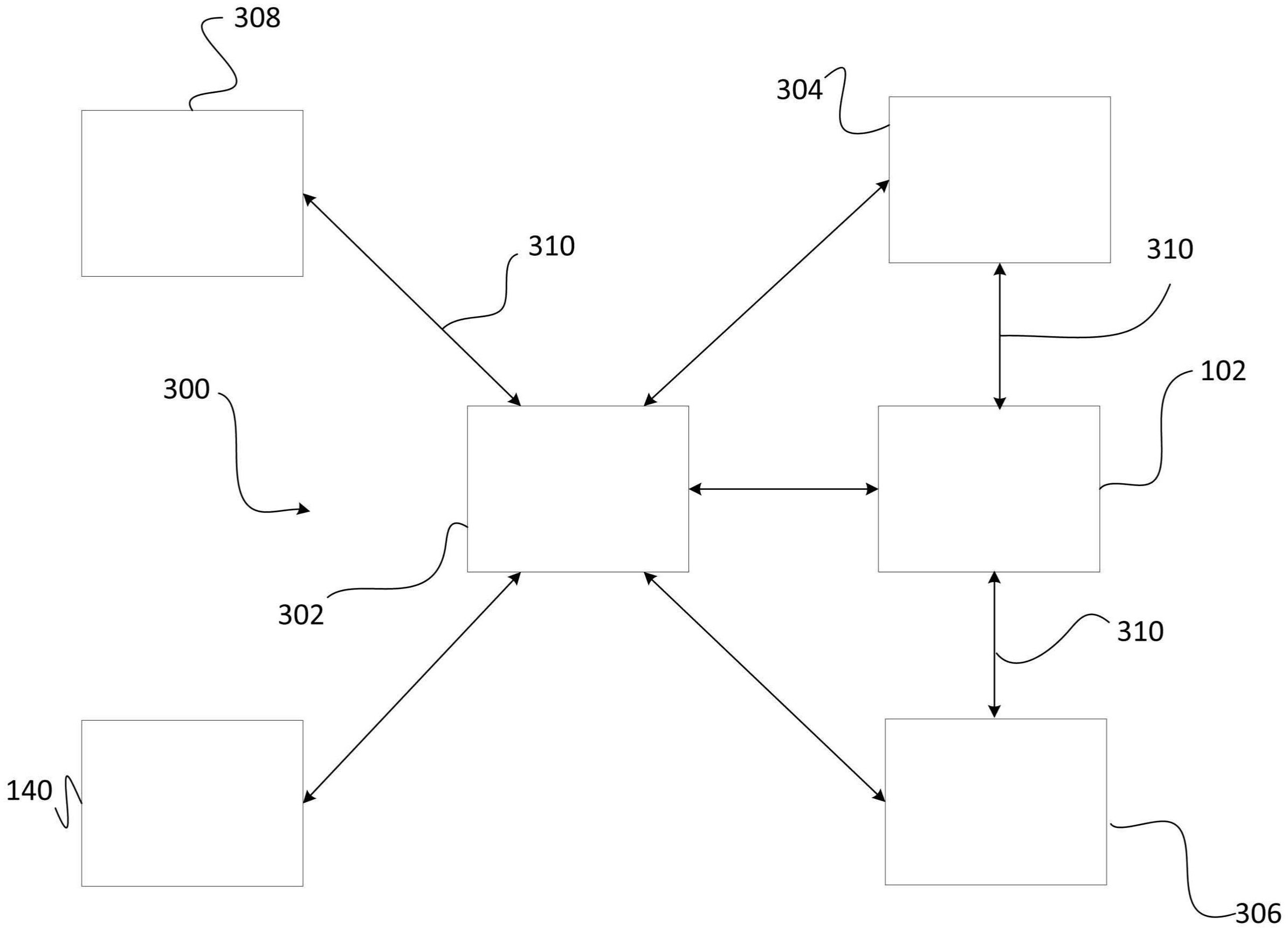
在一个实施例中,一种用于控制自行车的一个或多个电动部件的方法包括由与一 个或多个电动部件中的电动部件通信的处理器识别传感器数据。该传感器数据识别自行车 的状态。该方法还包括由处理器基于所识别的传感器数据确定骑手接合状态,并且由处理 器基于所确定的骑手接合状态停止或防止电动部件的移动。 在一个实施例中,识别传感器数据包括由处理器从自行车的一个或多个定向传感 器接收定向数据。该方法还包括由处理器基于所接收的定向数据来确定自行车的定向。确 定骑手接合状态包括基于所确定的自行车的定向来确定用户是否正在骑自行车。基于骑手 接合状态停止或防止电动部件的移动包括当所确定的骑手接合状态指示用户未在骑自行 车时停止或防止电动部件的移动。 在一个实施例中,从自行车的一个或多个定向传感器接收定向数据包括以预定间 隔从至少一个加速度计接收定向数据。确定自行车的定向包括对所接收的定向数据的一部 分求平均并且基于所接收的定向数据的平均部分来确定自行车的定向。 在一个实施例中,基于所识别的传感器数据确定骑手接合状态包括基于所识别的 传感器数据确定自行车是否经受预定减速度。 在一个实施例中,电动部件是辅助马达。停止或防止电动部件的移动包括当所确 定的骑手接合状态指示用户经受预定减速度时停止或防止辅助马达的移动。 在一个实施例中,电动部件是第一电动部件,并且一个或多个电动部件包括第二 电动部件。第一电动部件是辅助马达,并且第二电动部件是拨链器马达。该方法还包括由处 理器基于所确定的骑手接合状态停止或防止第二电动部件的移动。 在一个实施例中,识别传感器数据包括从自行车的一个或多个定向传感器接收自 行车定向数据、从自行车的一个或多个车轮速度传感器接收车轮速度数据、从一个或多个 6 CN 111572696 A 说 明 书 2/23 页 节奏(cadence)传感器接收曲柄速度数据、从自行车的一个或多个应变计接收应变数据、从 一个或多个加速度计、一个或多个陀螺仪或其组合接收加速度数据,或上述情况的任意组 合。 在一个实施例中,车轮速度数据包括第一车轮速度数据和第二车轮速度数据。识 别传感器数据包括从第一车轮速度传感器接收第一车轮速度数据。所接收的第一车轮速度 数据表示第一车轮速度。第一车轮速度是自行车的第一车轮的车轮速度。识别传感器数据 还包括从第二车轮速度传感器接收第二车轮速度数据。所接收的第二车轮速度数据表示第 二车轮速度。第二车轮速度是自行车的第二车轮的车轮速度。确定骑手接合状态包括将第 一车轮速度数据与第二车轮速度数据对比并且基于该对比确定骑手接合状态。 在一个实施例中,将第一车轮速度数据与第二车轮速度数据对比包括计算第一车 轮速度与第二车轮速度之间的差。基于对比确定骑手接合状态包括基于所计算的差确定骑 手接合状态。 在一个实施例中,基于所计算的差确定骑手接合状态包括将所计算的差与预定的 差对比,并且当所计算的差大于预定的差时确定自行车被支撑离开可供支撑自行车的表 面。基于所确定的骑手接合状态停止或防止电动部件的移动包括当确定自行车被支撑离开 该表面时停止或防止电动部件的移动。 在一个实施例中,一种用于控制电动自行车的方法包括由处理器从电动自行车的 第一传感器接收第一传感器数据以及由处理器从电动自行车的第二传感器接收第二传感 器数据。该方法还包括由处理器基于第一传感器数据和第二传感器数据来识别电动自行车 是否被支撑成使得电动自行车的车轮在电动自行车不平移的情况下可驱动。该方法包括由 处理器基于该识别来防止电动自行车的电动部件的移动。 在一个实施例中,从第一传感器接收第一传感器数据包括从第一车轮速度传感器 接收第一车轮速度数据。第一车轮速度数据表示电动自行车的第一车轮的车轮速度。从第 二传感器接收第二传感器数据包括从第二车轮速度传感器接收第二车轮速度数据。第二车 轮速度数据表示电动自行车的第二车轮的车轮速度。该识别包括将第一车轮速度与第二车 轮速度对比。防止电动部件的移动包括基于第一车轮速度与第二车轮速度的对比来防止电 动部件的移动。 在一个实施例中,将第一车轮速度与第二车轮速度对比包括确定第一车轮速度与 第二车轮速度之间的差。该识别还包括将所确定的差与预定的差对比。防止电动部件的移 动包括基于所确定的差与预定的差的对比来防止电动部件的移动。 在一个实施例中,该方法还包括在防止电动自行车的电动部件的移动之后,由处 理器接收用户输入,并且基于所接收的用户输入允许电动自行车的电动部件的移动。 在一个实施例中,从第一传感器接收第一传感器数据包括从电动自行车的定向传 感器接收自行车定向数据、从电动自行车的第一车轮速度传感器接收第一车轮速度数据、 从电动自行车的第二车轮速度传感器接收第二车轮速度数据、从电动自行车的节奏传感器 接收曲柄速度数据、从电动自行车的应变计接收应变数据以及从加速度计、陀螺仪或其组 合接收加速度数据中的一者。从第二传感器接收第二传感器数据包括从电动自行车的定向 传感器接收自行车定向数据、从电动自行车的第一车轮速度传感器接收第一车轮速度数 据、从电动自行车的第二车轮速度传感器接收第二车轮速度数据、从电动自行车的节奏传 7 CN 111572696 A 说 明 书 3/23 页 感器接收曲柄速度数据、从电动自行车的应变计接收应变数据以及从加速度计、陀螺仪或 其组合接收加速度数据中的另一者。 在一个实施例中,从第一传感器接收第一传感器数据包括从电动自行车的曲柄 臂、框架、车把或车座的应变计接收应变数据。 在一个实施例中,一种用于控制自行车的电子换挡的方法包括由处理器基于从自 行车的第一传感器接收的第一传感器数据来确定自行车是否正在移动。当确定自行车正在 移动时,该方法还包括由处理器确定骑手接合状态。骑手接合状态的确定包括:由处理器识 别来自自行车的第二传感器数据;由处理器识别来自自行车的第三传感器数据;以及基于 第二传感器数据和第三传感器数据确定骑手接合状态。当所确定的骑手接合状态指示正在 骑自行车时,该方法包括使辅助马达能够用于自行车的电子换挡。 在一个实施例中,该方法还包括识别第一传感器数据。识别第一传感器数据包括 从自行车的车轮速度传感器接收车轮速度数据。识别第二传感器数据包括从自行车的曲柄 处的应变计接收曲柄应变数据。识别第三传感器数据包括从自行车的曲柄速度传感器接收 曲柄速度数据。确定骑手接合状态包括:由处理器基于所接收的曲柄应变数据和所接收的 曲柄速度数据计算输入功率:将所计算的输入功率与预定阈值功率对比;以及基于所计算 的输入功率与预定阈值功率的对比确定骑手接合状态。 在一个实施例中,当确定自行车不在移动时,该方法包括禁止使用辅助马达用于 自行车的电子换挡。 在一个实施例中,该方法还包括由处理器识别辅助马达的马达电流。该方法还包 括由处理器将所识别的辅助马达的马达电流与预定最大马达电流对比,并且基于该对比, 当所识别的辅助马达的马达电流大于预定最大马达电流时,禁止使用辅助马达用于自行车 的电子换挡。 在一个实施例中,一种用于控制自行车的电子换挡的方法包括由处理器确定自行 车是否正在移动。当确定自行车正在移动时,该方法还包括由处理器确定自行车是否正在 被踩踏。当确定自行车没有被踩踏时,该方法包括使自行车的辅助马达向自行车的传动系 提供动力,以便自行车进行电子换挡。 在一个实施例中,确定自行车是否正在移动包括由处理器从自行车的车轮速度传 感器接收车轮速度数据,并且基于所接收的车轮速度数据确定自行车是否正在移动。 在一个实施例中,确定自行车是否正在被踩踏包括由处理器从自行车的一个或多 个曲柄传感器接收曲柄数据,并且基于所接收的曲柄数据确定自行车是否正在被踩踏。 在一个实施例中,从一个或多个曲柄传感器接收曲柄数据包括从自行车的节奏传 感器接收曲柄节奏数据、从自行车的角位置传感器接收曲柄角位置数据、从自行车的角速 度传感器接收曲柄角速度数据,或上述情况的任何组合。 在一个实施例中,当确定自行车正在被踩踏时,该方法还包括由处理器基于所接 收的曲柄数据连续地或以预定间隔估计曲柄臂的角位置,并且当所估计的曲柄臂的角位置 匹配曲柄臂的预定角位置时,使自行车的辅助马达向自行车的传动系提供动力以便自行车 进行电子换挡。 在一个实施例中,曲柄臂的预定角位置对应于曲柄臂的竖直位置。 在一个实施例中,使自行车的辅助马达向自行车的传动系提供动力以便自行车进 8 CN 111572696 A 说 明 书 4/23 页 行电子换挡包括使自行车的辅助马达向自行车的传动系提供动力持续一段时间,使得换挡 单个挡位。 在一个实施例中,确定自行车是否正在移动、确定自行车是否正在被踩踏、以及使 得自行车的辅助马达向自行车的传动系提供动力以便自行车进行电子换挡是自行车的操 作模式的一部分。该方法还包括由处理器启动自行车的操作模式。 在一个实施例中,该方法还包括接收用户输入。启动自行车的操作模式包括基于 所接收的用户输入启动自行车的操作模式。 在一个实施例中,启动自行车的操作模式包括当确定自行车正在移动并且确定自 行车没有踩踏时自动启动自行车的操作模式。 在一个实施例中,该方法还包括由处理器连续地或以预定间隔从自行车的车轮速 度传感器接收车轮速度数据。在启动自行车的操作模式之后,该方法包括基于所接收的车 轮速度数据控制用于自行车的电子换挡的辅助马达。 在一个实施例中,用于自行车的控制器包括被构造成确定自行车是否正在移动的 处理器。该处理器还被构造成当确定自行车正在移动时确定自行车是否正在被踩踏。该处 理器被构造成当自行车被确定为没有踩踏时,使自行车的辅助马达向自行车的传动系提供 动力,以便后拨链器进行电子换挡。 在一个实施例中,确定自行车是否正在移动包括由处理器从自行车的车轮速度传 感器接收车轮速度数据以及基于所接收的车轮速度数据确定自行车是否正在移动。 在一个实施例中,确定自行车是否正在被踩踏包括由处理器从自行车的一个或多 个曲柄传感器接收曲柄数据以及基于所接收的曲柄数据确定自行车是否正在被踩踏。曲柄 数据表示自行车的曲柄臂的曲柄速度、曲柄节奏或曲柄速度和曲柄节奏。 在一个实施例中,处理器还被构造成基于所接收的曲柄数据连续地或以预定间隔 估计曲柄臂的角位置。使自行车的辅助马达向自行车的传动系提供动力以便后拨链器进行 电子换挡包括当所估计的曲柄臂的角位置匹配曲柄臂的预定角位置时使自行车的辅助马 达向自行车的传动系提供动力以便后拨链器进行电子换挡。 在一个实施例中,曲柄臂的预定角位置对应于曲柄臂的竖直位置。 在一个实施例中,一种用于控制自行车的电子换挡的方法包括由处理器从自行车 的车轮速度传感器接收车轮速度数据以及由处理器基于所接收的车轮速度数据来确定自 行车是否正在移动。当确定自行车正在移动时,该方法还包括由处理器识别表示自行车的 曲柄臂的曲柄速度、曲柄节奏或曲柄速度和曲柄节奏的曲柄数据,并且基于所识别的曲柄 数据确定自行车是否正在被踩踏。当确定自行车没有被踩踏时,该方法包括使自行车的辅 助马达向自行车的传动系提供动力,以便自行车进行电子换挡。 在一个实施例中,识别曲柄数据包括由处理器从自行车的一个或多个曲柄传感器 接收曲柄数据。 在一个实施例中,该方法还包括;当自行车被确定为正在被踩踏时,由处理器基于 所接收的曲柄数据连续地或以预定间隔估计曲柄臂的角位置;以及当所估计的曲柄臂的角 位置匹配曲柄臂的预定角位置时,使自行车的辅助马达向自行车的传动系提供动力以便自 行车进行电子换挡。 在一个实施例中,从自行车的车轮速度传感器接收车轮速度数据包括连续地或以 9 CN 111572696 A 说 明 书 5/23 页 预定间隔从自行车的车轮速度传感器接收车轮速度数据。该方法还包括:在使自行车的辅 助马达向自行车的传动系提供动力以便自行车进行电子换挡之后,基于所接收的车轮速度 数据控制用于自行车的电子换挡的辅助马达。 在一个实施例中,一种用于控制自行车的电子换挡的方法包括由处理器识别第一 传感器数据。第一传感器数据表示自行车的状态或骑自行车时所处的环境。该方法还包括 基于所识别的传感器数据或用户输入启动自行车的电子换挡的自动控制。自行车的电子换 挡的自动控制包括:由处理器从第二传感器数据识别自行车的曲柄臂的节奏;由处理器将 所识别的节奏与预定目标节奏对比;以及由处理器基于该对比启动自行车的电子换挡。启 动自行车的电子换挡包括当所识别的节奏小于阈值节奏时致动自行车的马达以便自行车 进行电子换挡。 在一个实施例中,识别第一传感器数据包括由处理器从自行车的一个或多个定向 传感器接收定向数据。定向数据表示自行车的定向。识别第一传感器数据还包括由处理器 从车轮速度传感器接收车轮速度数据。 在一个实施例中,第二传感器数据包括曲柄速度数据。从第二传感器数据识别自 行车的曲柄臂的节奏包括由处理器从自行车的一个或多个节奏传感器接收曲柄速度数据。 在一个实施例中,将所识别的节奏与预定目标节奏对比包括确定所识别的节奏与 预定目标节奏之间的差。基于对比启动自行车的电子换挡包括当所确定的差大于预定的差 时启动自行车的电子换挡。该方法还包括由处理器基于所确定的差和预定的传动比表格来 识别目标挡位。启动自行车的电子换挡包括将自行车的拨链器换挡到所识别的目标挡位。 在一个实施例中,该方法还包括:由处理器接收响应于用户输入而产生的信号;以 及基于所接收的信号停止自行车的电子换挡的自动控制。 在一个实施例中,该方法还包括由处理器接收响应于用户输入而生成的信号。所 接收的信号指示自行车的拨链器将要换挡。该方法还包括基于所接收的信号使拨链器换 挡。 在一个实施例中,该方法还包括响应于接收到信号而结束或暂停电子换挡的自动 控制。 在一个实施例中,一种用于控制自行车的电子换挡的方法包括由处理器启动自行 车的电子换挡的自动控制。该方法还包括:由处理器识别最小挡位,当自行车处于特定状态 时,在电子换挡的自动控制期间拨链器不可换挡超过该最小挡位;以及由处理器从自行车 的节奏传感器接收节奏数据。在启动电子换挡的自动控制之后,该方法包括由处理器基于 所接收的节奏数据识别目标挡位以及由处理器将所识别的目标挡位与所识别的最小挡位 对比。该方法还包括由处理器基于该对比防止或允许自行车的拨链器换挡到所识别的目标 挡位。 在一个实施例中,该方法还包括由处理器基于所接收的节奏数据确定自行车是否 正在被踩踏。基于对自行车是否正在被踩踏的确定,防止或允许自行车的拨链器换挡到所 识别的目标挡位。 在一个实施例中,基于对自行车是否正在被踩踏的确定来防止或允许自行车的拨 链器换挡到所识别的目标挡位包括当确定自行车被踩踏时允许自行车的拨链器换挡到所 识别的目标挡位。 10 CN 111572696 A 说 明 书 6/23 页 在一个实施例中,当确定自行车被踩踏时允许自行车的拨链器换挡到所识别的目 标挡位包括当所识别的节奏小于阈值节奏时致动自行车的马达以便自行车进行电子换挡。 在一个实施例中,该方法还包括由处理器从自行车的应变计接收应变数据以及由 处理器基于所接收的应变数据确定自行车上的扭矩。该方法还包括将所确定的扭矩与预定 阈值扭矩对比。基于所确定的扭矩与预定阈值扭矩的对比,防止或允许自行车的拨链器换 挡至所识别的目标挡位。 在一个实施例中,该方法还包括由处理器接收响应于用户输入而生成的信号。所 接收的信号包括换挡指令。该方法还包括响应于所接收的信号停止自行车的电子换挡的自 动控制以及基于所接收的换挡指令使自行车的拨链器换挡。 在一个实施例中,该方法还包括由处理器从自行车的定向传感器接收定向数据。 定向数据表示自行车的定向。该方法还包括由处理器基于所接收的定向数据来确定自行车 是否沿斜坡向上行进。基于对比来防止或允许自行车的拨链器换挡到所识别的目标挡位包 括当所识别的目标挡位超过所识别的最小挡位时,允许自行车的拨链器在确定自行车沿斜 坡向上行进时换挡到所识别的目标挡位。 在一个实施例中,该方法还包括由处理器调节最小挡位。 在一个实施例中,一种用于控制自行车的电子换挡的方法包括由处理器启动自行 车的电子换挡的自动控制。自行车的电子换挡的自动控制包括由处理器从节奏数据识别自 行车的曲柄臂的第一节奏以及由处理器将所识别的第一节奏与目标节奏对比。该方法还包 括:由处理器基于所识别的第一节奏与目标节奏的对比来启动自行车的电子换挡;由处理 器接收响应于用户输入而生成的信号;以及由处理器基于所接收的信号来调节目标节奏。 该方法包括:由处理器从节奏数据识别曲柄臂的第二节奏;由处理器将所识别的第二节奏 与所调节的目标节奏对比;以及由处理器基于所识别的第二节奏与所调节的目标节奏的对 比启动自行车的电子换挡。 在一个实施例中,基于所识别的第一节奏与目标节奏的对比启动自行车的电子换 挡包括基于所识别的第一节奏与目标节奏的对比和传动比表格识别目标挡位。 在一个实施例中,目标挡位是第一目标挡位。自行车的电子换挡的自动控制还包 括基于所调节的目标节奏调节传动比表格。基于所识别的第二节奏与所调节的目标节奏的 对比启动自行车的电子换挡包括基于所识别的第二节奏与所调节的目标节奏的对比以及 所调节的传动比表格识别第二目标挡位。 在一个实施例中,所接收的信号是第一接收信号,用户输入是第一用户输入,并且 所调节的目标节奏是第一调节目标节奏。该方法还包括由处理器接收响应于第二用户输入 而生成的第二信号。第二信号表示将第一调节目标节奏调节到第二调节目标节奏的请求。 该方法还包括:由处理器将第二调节目标节奏与预定节奏范围对比;以及基于第二调节目 标节奏与预定节奏范围的对比,当第二调节目标节奏超出预定节奏范围时,将第一调节目 标节奏维持为目标节奏。 在一个实施例中,该信号是第一信号,并且用户输入是第一用户输入。该方法还包 括由处理器接收响应于第二用户输入而生成的第二信号。第二信号识别换挡请求。该方法 还包括:基于第二信号的接收而将自行车的电子换挡的自动控制禁止预定时间量;以及基 于所接收的第二信号而使拨链器换挡。 11 CN 111572696 A 说 明 书 7/23 页 附图说明 通过结合附图阅读以下描述,本发明的目的、特征和优点将变得显而易见,其中: 图1示出了具有可根据本公开的教导进行控制的部件运动的自行车的一个实施例 的侧视图; 图2是后拨链器的一个实施例的侧视图; 图3是机电控制系统的实施方式的方框图; 图4是操作部件的方框图; 图5是用于自动换挡的方法的实施方式的流程图; 图6是用于控制自行车的一个或多个部件的方法的实施方式的流程图; 图7是用于控制自行车的一个或多个部件的方法的另一实施方式的流程图; 图8是用于控制自行车的一个或多个部件的方法的又一实施方式的流程图; 图9是用于控制自行车的一个或多个部件的方法的另一实施方式的流程图;以及 图10是用于控制自行车的一个或多个部件的方法的实施方式的流程图;











