
技术摘要:
本发明实施例提供一种点云数据处理方法及装置、障碍物检测方法及装置,属于计算机技术领域。所述点云数据处理方法包括:对当前环境的深度图像进行三维重构以生成点云数据集合;将所述点云数据集合划分为多个子点云数据集合;基于预设的标准离群点去除半径和标准深度区 全部
背景技术:
环境感知作为设备无人化操作的首要环节,主要有激光雷达和双目视觉两种解决 方案。激光雷达对光照和色彩等干扰因素具有很强的鲁棒性,但易受到雪、雾灯恶劣天气的 影响。双目视觉相较于激光雷达,不仅能获取环境的三维信息,还能输出特征复杂的彩色图 像,且成本更低。因此,目前双目视觉被被广泛应用于无人驾驶、虚拟现实等领域,尤其应用 于这些领域的障碍物检测中。
技术实现要素:
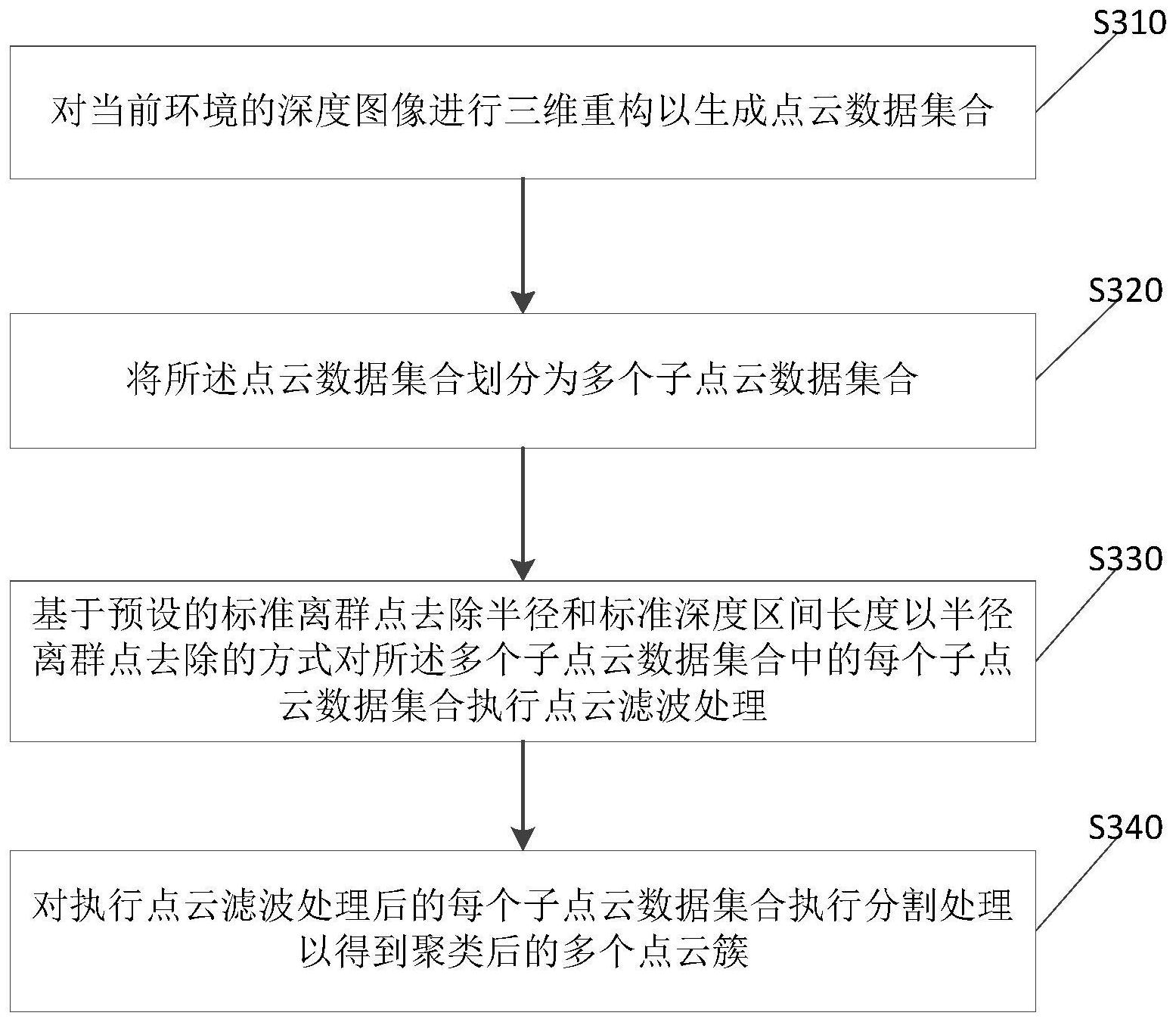
本发明实施例的目的是提供一种点云数据处理方法及装置、障碍物检测方法及装 置,用于实现点云数据的聚类处理,并相应实现障碍物的检测。 为了实现上述目的,本发明实施例提供一种点云数据处理方法,所述方法包括:对 当前环境的深度图像进行三维重构以生成点云数据集合;将所述点云数据集合划分为多个 子点云数据集合;基于预设的标准离群点去除半径和标准深度区间长度以半径离群点去除 的方式对所述多个子点云数据集合中的每个子点云数据集合执行点云滤波处理;以及对执 行点云滤波处理后的每个子点云数据集合执行分割处理以得到聚类后的多个点云簇。 可选的,所述基于预设的标准离群点去除半径和标准深度区间长度对所述多个子 点云数据集合中的每个子点云数据集合执行点云滤波处理包括:针对每个子点云数据集合 执行以下步骤:使用所述标准离群点去除半径、所述标准深度区间长度和所述子点云数据 集合的深度区间长度以等比例分配方式得到所述子点云数据集合的离群点去除半径;使用 所述子点云数据集合的离群点去除半径为搜索半径对所述子点云数据集合执行邻近点搜 索;以及在所述邻近点搜索的结果显示所述搜索半径内的邻近点数量小于最小邻近点数量 阈值的情况下,将所述搜索半径内的点云数据作为离群数据而删除。 可选的,所述标准离群点去除半径是针对所述多个子点云数据集合中的特定子点 云数据集合而预设的,所述标准深度区间长度为所述特定子点云数据集合的标准深度区间 长度。 可选的,所述点云滤波处理和所述分割处理是针对所述每个子点云数据集合而被 并行执行的。 可选的,所述将所述点云数据集合划分为多个子点云数据集合包括:获取所述深 度图像基于像素点深度值的直方图分布;根据所述直方图分布中每个直方图维度对应的像 素点个数来建立多个深度区间;以及根据所述多个深度区间中每个深度区间包括的像素点 对应的点云数据来将所述点云数据集合划分为与多个深度空间对应的多个子点云数据集 合。 4 CN 111582054 A 说 明 书 2/11 页 可选的,所述根据所述直方图分布中每个直方图维度对应的像素点个数来建立多 个深度区间包括:以第一直方图维度为起点,沿着深度值变化的第一方向,累加每个直方图 维度对应的像素点个数;当所述累加的像素点个数大于像素区间阈值时,停止累加;建立一 个深度区间,其中所述一个深度区间的下限基于所述起点处的直方图维度对应的深度值确 定且所述一个深度区间的上限基于当前执行停止累加时的直方图维度对应的深度值确定; 以及以所述当前执行停止累加时对应的直方图维度的下一个直方图维度为起点,重复执行 上述步骤直到所述直方图分布的直方图维度遍历完成,从而得到所述多个深度区间。 可选的,所述第一直方图维度为最小深度值对应的直方图维度,所述第一方向为 深度值增大的方向;或者所述第一直方图维度为最大深度值对应的直方图维度,所述第一 方向为深度值减小的方向。 相应的,本发明实施例还提供一种障碍物检测方法,所述方法包括:获取当前环境 的深度图像;根据上述的点云数据处理方法对所述当前环境的深度图像对应的点云数据集 合进行处理以得到聚类后的多个点云簇;去除所述多个点云簇中属于地面点云的点云簇; 以及基于去除地面点云后的点云簇确定所述障碍物的类别信息和/或位置信息。 可选的,所述基于去除地面点云后的点云簇确定所述障碍物的类别信息包括:基 于去除地面点云后的点云簇确定所述障碍物的感兴趣区域;对所述感兴趣区域进行特征提 取以得到特征向量;以及将所述特征向量输入分类器以输出所述障碍物的类别信息。 相应的,本发明实施例还提供一种点云数据处理装置,所述装置包括:第二三维重 构模块,用于对当前环境的深度图像进行三维重构以生成点云数据集合;点云数据集合划 分模块,用于将所述点云数据集合划分为多个子点云数据集合;点云滤波处理模块,用于基 于预设的标准离群点去除半径和标准深度区间长度以半径离群点去除的方式对所述多个 子点云数据集合中的每个子点云数据集合执行点云滤波处理;以及分割模块,用于对执行 点云滤波处理后的每个子点云数据集合执行分割处理以得到聚类后的多个点云簇。 相应的,本发明实施例还提供一种障碍物检测装置,所述装置包括:深度图像获取 模块,用于获取当前环境的深度图像;点云数据处理模块,用于根据上述的点云数据处理方 法对所述当前环境的深度图像对应的点云数据集合进行处理以得到聚类后的多个点云簇; 地面点云去除模块,用于去除所述多个点云簇中属于地面点云的点云簇;以及障碍物信息 确定模块,用于基于去除地面点云后的点云簇确定所述障碍物的类别信息和/或位置信息。 相应的,本发明实施例还提供一种机器可读存储介质,所述机器可读存储介质上 存储有指令,所述指令用于使得机器执行上述的点云数据处理方法,和/或根据上述的障碍 物检测方法。 相应的,本发明实施例还提供一种电子设备,所述电子设备包括至少一个处理器、 与处理器连接的至少一个存储器、以及总线;其中,所述处理器、所述存储器通过所述总线 完成相互间的通信;所述处理器用于调用所述存储器中的程序指令,以执行上述的点云数 据处理方法,和/或上述的障碍物检测方法。 通过上述技术方案,在执行点云数据处理时,预设标准离群点去除半径和标准深 度区间长度,并基于标准离群点去除半径和标准深度区间长度以半径离群点去除的方法对 子点云数据集合执行点云滤波处理,这种点云滤波方式能够提升不同深度区间下点云滤波 的自适应性,同时提升基于半径离群点去除的点云滤波效果,使得分割处理更加方便快捷。 5 CN 111582054 A 说 明 书 3/11 页 将所述点云数据处理应用到障碍物检测方法时可以最终提高障碍物检测精度。 本发明实施例的其它特征和优点将在随后的











