
技术摘要:
本发明提供一种波光混合动力无人巡逻艇,属于水面无人艇领域。本发明的目的在于提供一种波光混合动力无人巡逻艇。艇无人巡逻上配备无线通讯设备,可实现无人巡逻艇与无人巡逻艇之间、无人巡逻艇与岸基之间的数据传输,无人巡逻艇上带有水文传感器和自动驾驶系统,无人 全部
背景技术:
传统的巡逻船执行巡逻任务会占用大量的人力资源。传统的燃油船、电船只能在 有限的区域范围内执行短期的巡逻任务,无法执行长时间长航程的巡逻任务。
技术实现要素:
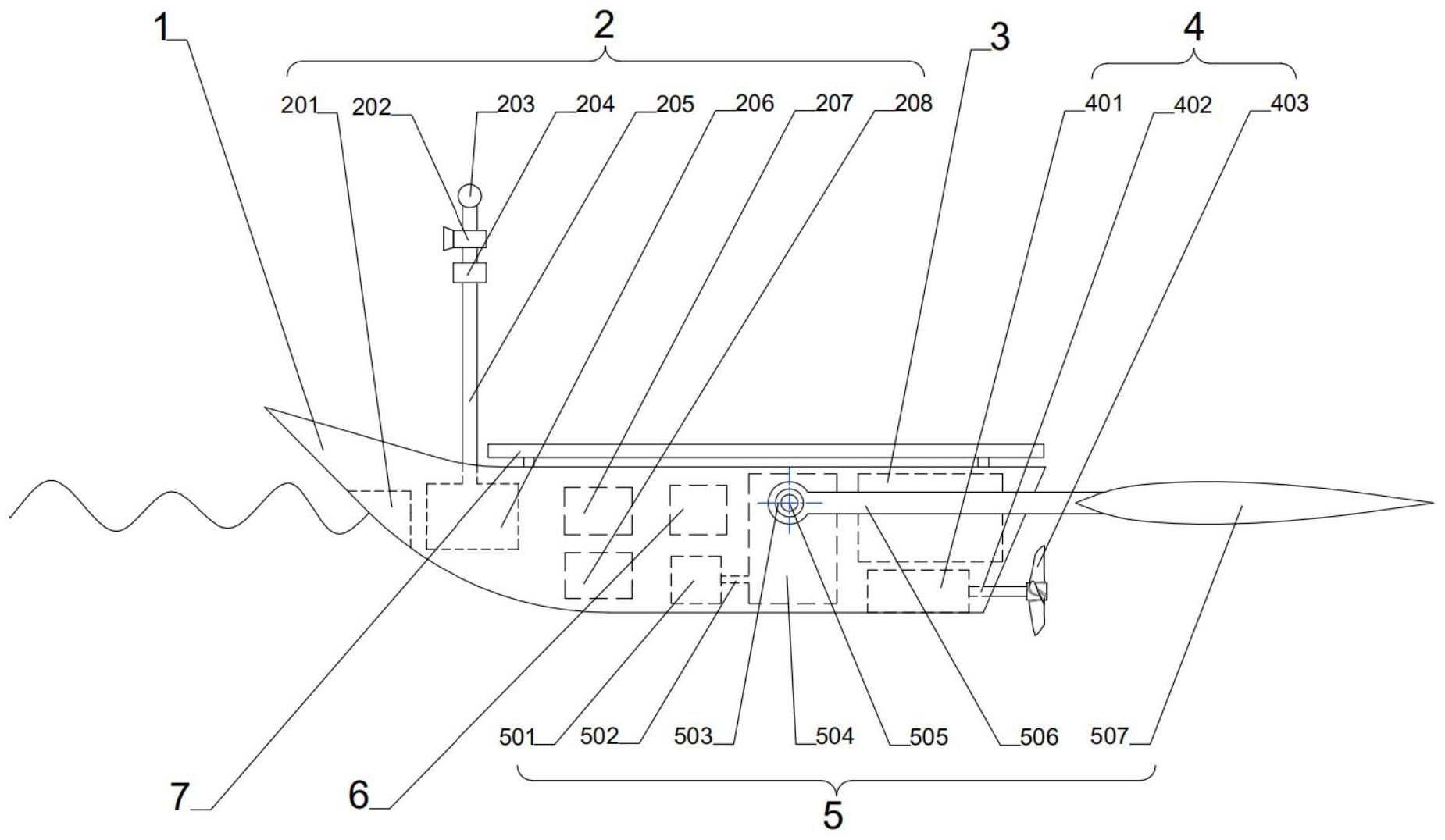
针对上述问题,本发明的目的在于提供一种波光混合动力无人巡逻艇,解决巡逻 艇的长续航问题,实现巡逻艇按照预设路径自适应巡航,节约人力资源,降低人员安全风 险。 为解决上述技术问题,本申请提供了一种波光混合动力无人巡逻艇,包括艇体、电 子辅助系统、蓄电池、动力推进系统、波浪能发电装置、电能管控系统和太阳能发电板,波浪 能发电装置的输出端与电能管控系统的输入端A电连接,太阳能发电板的输出端与电能管 控系统的输入端B电相连,电能管控系统的输出端与蓄电池电连接,所述的电子辅助系统包 括水文传感器、警示设备、通讯天线、视频监控系统、支撑杆、中央控制器、自动驾驶仪、北斗 导航系统,水文传感器设置于艇艏位置,通讯天线、警示设备和视频监控系统通过螺栓与于 支撑杆相连接,中央控制器、自动驾驶仪和北斗导航系统设置于艇体内部,所述的动力推进 系统包括电动机、联轴器一和螺旋桨,电动机通过地脚螺栓与艇体相连接,螺旋桨通过联轴 器一与电动机轴相连接,所述的波浪能发电装置包括发电机、联轴器二、棘轮机构、变速箱、 传动轴、连接杆和浮板,浮板与连接杆通过螺纹连接,棘轮机构设置于连接杆和传动轴之 间,棘轮机构包括棘轮、棘爪、压簧和销钉,棘轮与传动轴焊接固定,棘爪通过销钉与连接杆 铰接,销钉焊接在连接杆上,棘轮机构将连接杆的往复摆动换成传动轴的单向逆时针的旋 转运动,传动轴作为变速箱的输入轴,发电机轴作为变速箱的输出轴。 优选的,所述的艇体采用玻璃钢材料制成,其最大长度为5.3m,最大宽度为1.8m。 优选的,所述的蓄电池为磷酸铁二次锂电池。 优选的,所述的动力推进系统为对称分布在艇艉的两台螺旋桨推进器,螺旋桨采 用铝合金材料制成,螺旋桨表面经过硬质氧化处理。 优选的,所述的变速箱的传动比为1:5。 优选的,所述的浮板采用BYM材料,浮板表面经过喷漆处理,浮板横截面呈翼型。 本发明的有益效果为: 1、本发明的目的在于提供一种波光混合动力无人巡逻艇。艇上配备无线通讯设 备,可实现无人巡逻艇与无人巡逻艇之间、无人巡逻艇与岸基之间的数据传输,无人巡逻艇 上带有自动驾驶系统,可按照预设路径自适应巡航,岸基人员可通过无线通讯设备对无人 巡逻艇进行远程控制,极大地节省了人力资源; 2、该无人巡逻艇依靠波浪能和太阳能两种自然能源提供动力,两种自然能源解决 3 CN 111591398 A 说 明 书 2/3 页 了无人巡逻艇的长续航问题。 附图说明 图1为本发明实施例一种波光混合动力无人巡逻艇的结构示意图; 图2为本发明实施例的棘轮机构结构示意图; 在附图中,相同的附图标号用来表示相同的零件或结构。其中1、艇体; 2、电子辅 助系统;3、蓄电池;4、动力推进系统;5、波浪能发电装置;6、电能管控系统;7、太阳能发电 板;201、水文传感器;202、警示设备;203、通讯天线;204、视频监控系统;205、支撑杆;206、 中央控制器;207、自动驾驶仪;208、北斗导航系统;401、电动机;402、联轴器一;403、螺旋 桨;501、发电机;502、联轴器二;503、棘轮机构;504、变速箱; 505、传动轴;506、连接杆; 507、浮板;5031、棘轮;5032、棘爪;5033、压簧;5034、销钉。











