
技术摘要:
本发明公开了一种直线运动系统的自适应递归前馈控制方法,包括:根据控制直线运动系统的反馈控制器,确定直线运动系统输出误差的功率谱,并根据所述功率谱提取出振动的特征频率;根据提取出的特征频率确定周期性扰动信号的等效扰动力,并根据所述等效扰动力确定估计扰 全部
背景技术:
超精密直线电机是光刻机工件台中实现最终运动精度的关键部件,其控制性能直 接决定了光刻机整机的分辨率、生产率等性能。光刻机工件台中直线电机的运动控制至关 重要的问题就是如何提高跟踪投影物镜周期振动的快速动态响应能力。目前,常用自适应 前馈抵消控制算法提高系统的动态响应能力,但是,现有的自适应前馈抵消控制算法的计 算量较大,不便于快速提高动态响应性能。
技术实现要素:
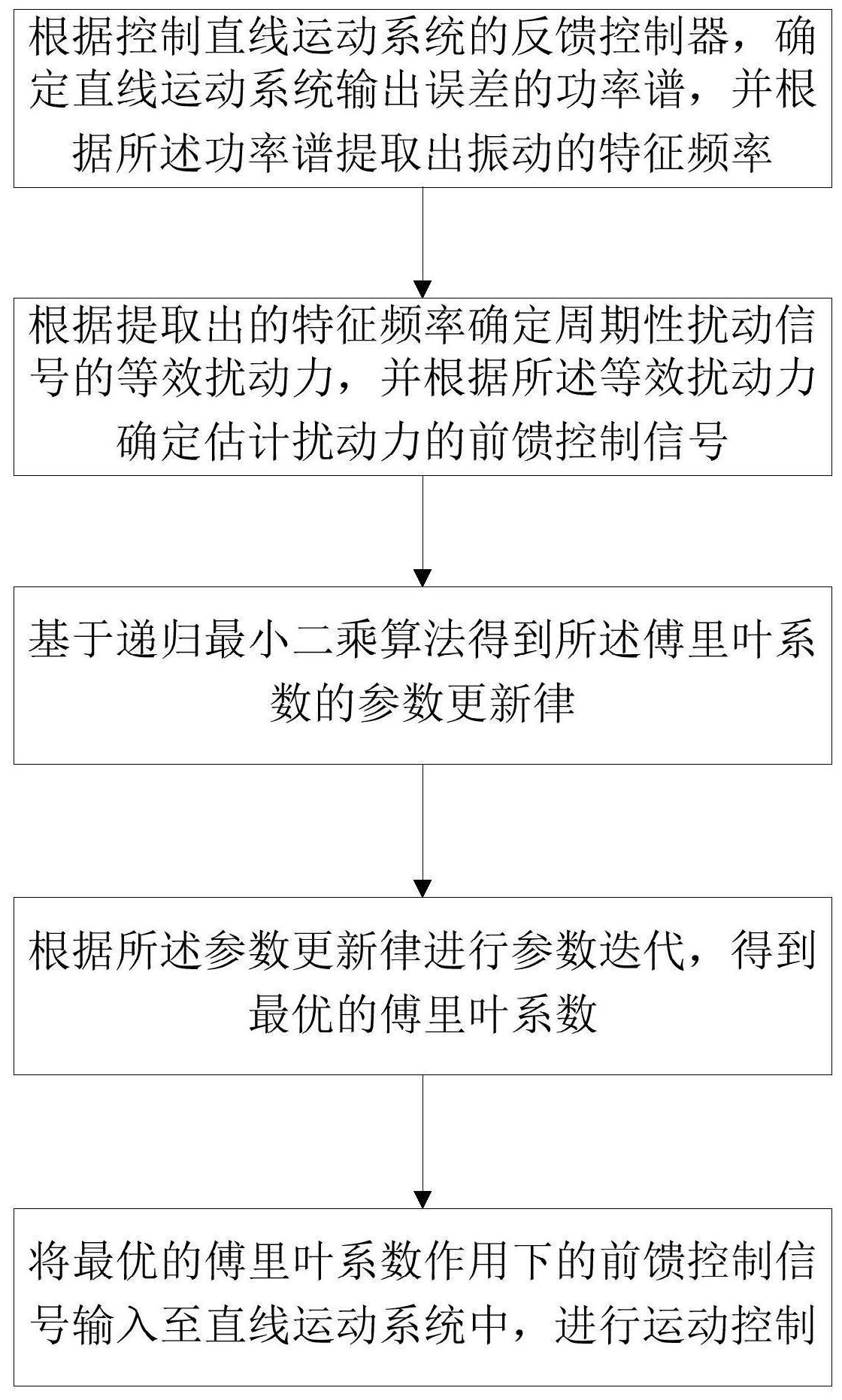
鉴于以上问题,本发明的目的是提供一种直线运动系统的自适应递归前馈控制方 法,以提升直线运动系统的动态性能,解决了动态响应缓慢的问题,具有较好的灵敏性和稳 态输出特性。 为了实现上述目的,本发明采用以下技术方案: 本发明所述直线运动系统的自适应递归前馈控制方法,包括: 根据控制直线运动系统的反馈控制器,确定直线运动系统输出误差的功率谱,并 根据所述功率谱提取出振动的特征频率; 根据提取出的特征频率确定周期性扰动信号的等效扰动力,并根据所述等效扰动 力确定估计扰动力的前馈控制信号,其中,所述前馈控制信号通过带有傅里叶系数的正弦 和表示; 基于递归最小二乘算法得到所述傅里叶系数的参数更新律; 根据所述参数更新律进行参数迭代,得到最优的傅里叶系数; 将最优的傅里叶系数作用下的前馈控制信号输入至直线运动系统中,进行运动控 制。 优选地,所述傅里叶系数的参数更新律如下式所示: P(n)=ρ-1[P(n-1)-g(n)x(n)TP(n-1)] 其中,u(n)表示第n时刻估计扰动力的前馈控制信号,n表示时刻,i表示特征频率 4 CN 111610715 A 说 明 书 2/9 页 的索引,N表示特征频率的个数, 和 表示自适应参数,ωi表示第i个特征频率,w(n)表示 系数矩阵,T表示矩阵转置,x(n)表示自变量矩阵,g(n)表示增益向量,ρ表示带权因子,P(n) 表示逆相关矩阵, 表示先验误差。 优选地,先验误差通过下式表示: 其中, 表示先验误差, 表示扰动信号的观测值,x(n)表示自变量矩阵,T 表示矩阵转置,w(n-1)表示系数矩阵。 优选地,周期性扰动信号的等效扰动力通过下式表示: 其中,Fd(t)表示等效扰动力,ωi表示等效扰动力Fd(t)的特征频率,N为特征频率 的个数,ai和bi为傅里叶系数,t表示时间。 优选地,估计扰动力的前馈控制信号通过下式表示: 其中,u(t)表示估计扰动力的前馈控制信号, 表示ai的估计值, 表示bi的估计 值,ωi表示等效扰动力的特征频率,N为特征频率的个数,t表示时间。 优选地,基于递归最小二乘算法得到所述傅里叶系数的参数更新律,包括: 设定目标函数,所述目标函数通过下式表示: 其中,J表示目标函数,ρ表示带权因子,k表示时间离散形式的简写,n表示时刻,d (k)表示扰动信号,w(n)表示系数矩阵,T表示矩阵转置,x(k)表示自变量矩阵; 对所述目标函数求导并令其为零,得到系数矩阵如下式所示: w(n)=R-1(n)r(n) 其中,w(n)表示系数矩阵,R-1(n)表示平均相关矩阵的逆矩阵,r(n)表示平均互相 关矩阵; 求解平均相关矩阵的逆矩阵,得到逆相关矩阵、增益向量和系数矩阵的迭代公式。 优选地,根据所述参数更新律进行参数迭代,得到最优的傅里叶系数,包括:将前 馈控制信号的控制指令输入至驱动器,通过驱动器输出电流驱动直线电机,并计算输出误 差;在下一个伺服周期,根据参数更新律更新参数,并利用更新后的参数得到前馈控制信 号,返回执行驱动直线电机并计算输出误差的步骤,直至输出误差为零,停止迭代更新,得 到最优的傅里叶系数。 优选地,所述输出误差通过下式表示: 5 CN 111610715 A 说 明 书 3/9 页 其中,e(t)表示t时刻的输出误差,P(s)表示被控对象,d(t)表示扰动信号,C(s)表 示反馈控制器,u(t)表示估计扰动力的前馈控制信号。 优选地,所述反馈控制器是比例-积分-微分控制器或超前滞后控制器。 优选地,所述特征频率的取值范围为6Hz~140Hz。 与现有技术相比,本发明具有以下优点和有益效果: 本发明所述直线运动系统的自适应递归前馈控制方法,将递归最小二乘法应用于 自适应前馈控制中,优化傅里叶系数的参数更新律,相比于现有的自适应前馈抵消控制算 法,极大地缩减了计算量,有效地提高了系统的动态响应性能,具有动态响应快、控制精度 高、鲁棒性能好的特点。 附图说明 图1为本发明中直线运动系统的自适应递归前馈控制方法的流程示意图; 图2为本发明中补偿多特征频率扰动力的闭环控制系统方框图; 图3为本发明中的仿真实验中补偿单个特征频率的闭环控制系统的等效作用方框 图; 图4a和图4b为自适应前馈抵消控制方法作用于闭环控制系统的仿真波形图; 图5a和图5b为本发明所述自适应递归前馈控制方法作用于闭环控制系统的仿真 波形图。











