
技术摘要:
本发明公开了一种无人驾驶专用测距系统,包括测距模块、行车电脑和控制模块,测距模块包括车前测距模块、车身测距模块和车后测距模块,车前测距模块包括前方主测距模块、前方测距模块和前侧方测距模块,车身测距模块为后视镜主测距模块,车后测距模块包括车后主测距模 全部
背景技术:
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计 算机系统为主的智能驾驶仪来实现无人驾驶的目的。无人驾驶的主要目的在于驾驶的安全 性,足够先进的测距系统才能够带来安全的无人驾驶,目前的无人驾驶测距的方向较少,在 复杂的路况上进行无人驾驶时容易漏掉盲区的路况分析,在无人驾驶的情况下安全系数较 低,因此一种能够进行全方位距离测量的测距系统亟待被研究。
技术实现要素:
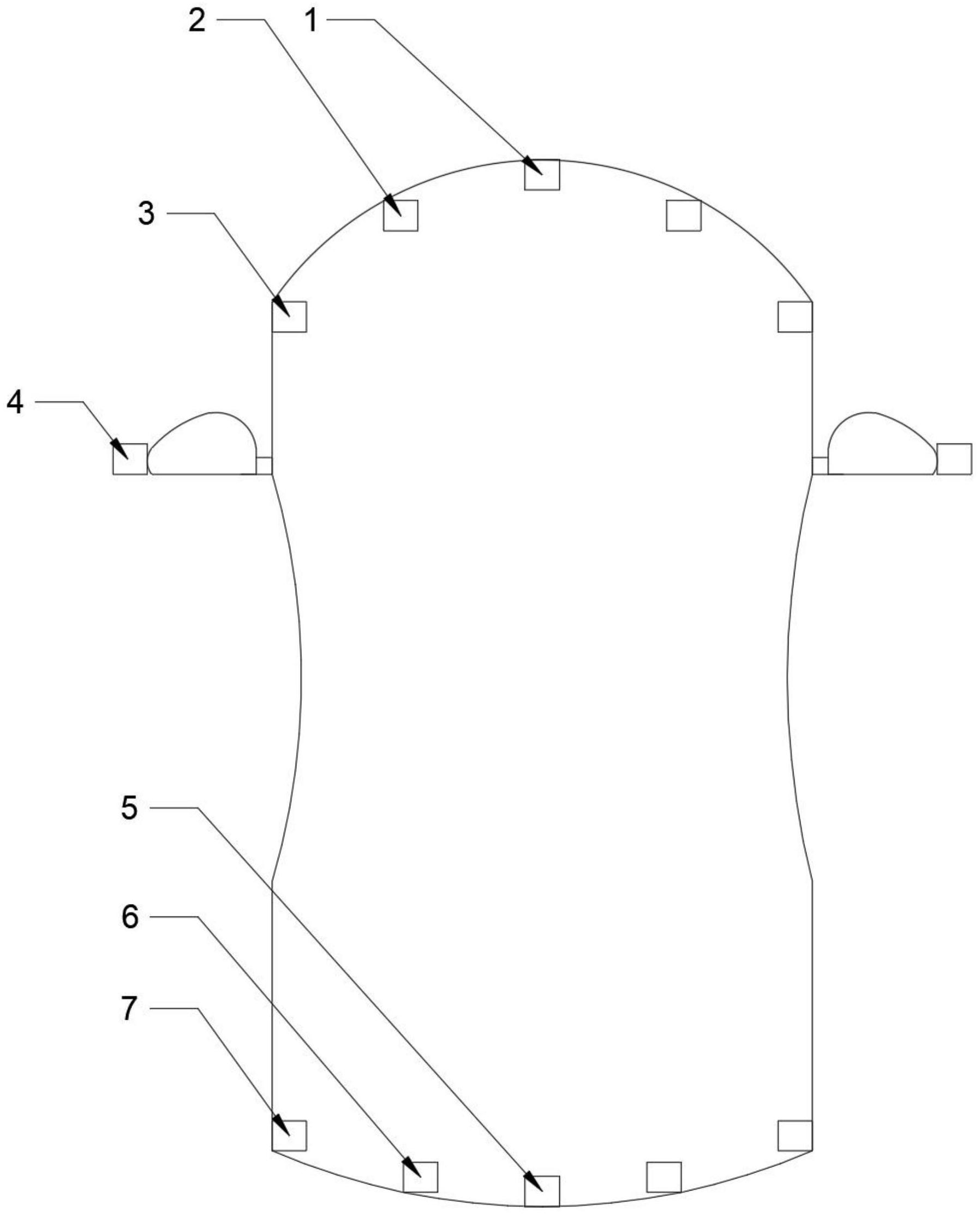
本发明要解决的技术问题是,针对以上问题提供一种多角度全路况分析的无人驾 驶专用测距系统。 为解决上述技术问题,本发明提供的技术方案为:一种无人驾驶专用测距系统,包 括测距模块、行车电脑和控制模块,所述测距模块包括车前测距模块、车身测距模块和车后 测距模块,所述车前测距模块包括前方主测距模块、前方测距模块和前侧方测距模块,所述 车身测距模块为后视镜主测距模块,所述车后测距模块包括车后主测距模块、后方测距模 块和后侧方测距模块,所述控制模块包括线控制动模块、电子液压助力转向模块和轮毂电 机模块。 本发明与现有技术相比的优点在于:能够测量车四周的路况及无人驾驶车辆四周 的车况,与临车保持安全车距,给无人驾驶系统提供足够的反应时间,包括车前侧面后侧面 的车距车速,都在测量的范围内,经过运算后方可进行测距后的操作,测距之后可以直接根 据测量的参数进行无人驾驶相应的简单操作,优先级低于人工做操,可以即使的纠正测距 系统的错误操作。 作为改进,所述前方主测距模块、后视镜主测距模块和车后主测距模块均采用多 传感器进行测距,主要包括视觉类摄像机和雷达类测距传感器,所述视觉类摄像机包括单 目相机、双目立体视觉相机、全景视觉相机及红外相机,所述雷达类测距传感器包括激光雷 达、毫米波雷达和超声波雷达,主测距模块负责运算车辆的距离和速度,能够进行路面及车 辆的识别,也可识别路标。 作为改进,所述前侧方测距模块设于车辆前方的两侧,用于分析超车路径,当前车 车速低于预期值时,如果超车路径上有车,或者处于实线区域,则会取消超车指令,如果超 车路径通畅,则会执行后侧方测距指令。 作为改进,所述后侧方测距模块分社与车辆后方的两侧,用于分析两侧车道后方 的车辆是否允许超车,当后侧方车辆距离较远,处于匀速行驶状态且车速低于本车车速时, 则会执行超车指令。 作为改进,所述测距模块的测量数据直接连接行车电脑,由行车电脑将指令传递 3 CN 111610784 A 说 明 书 2/4 页 至控制模块。 作为改进,所述线控制动模块为纯电控制的电子机械制动系统,完全不含机械结 构,由电机产生制动力,控制制动器制动,完全通过信号线接受行车电脑提供的制动信号来 提供制动力。 作为改进,所述电子液压助力转向模块采用电子式液压助力,与机械式液压助力 的区别主要是油泵的驱动方式不同,机械式液压助力的液压泵直接是通过发动机皮带驱动 的,而电子式液压助力利用ECU检测方向盘的转向角度,并由电力驱动电子泵对液压缸施 力。 作为改进,所述轮毂电机模块具备单个车轮独立驱动的特性,因此无论是前驱、后 驱还是四驱形式,它都可以比较轻松地实现,全时四驱在轮毂电机驱动的车辆上实现起来 非常容易。 作为改进,所述无人驾驶专用测距系统优先级低于人工驾驶操作指令的优先级, 当人工操作介入后,自动关闭无人驾驶专用测距系统。 附图说明 图1是一种无人驾驶专用测距系统的结构示意图。 图2是一种无人驾驶专用测距系统的系统结构图。 如图所示:1、前方主测距模块,2、前方测距模块,3、前侧方测距模块,4、后视镜主 测距模块,5、车后主测距模块,6、后方测距模块,7、后侧方测距模块。











