
技术摘要:
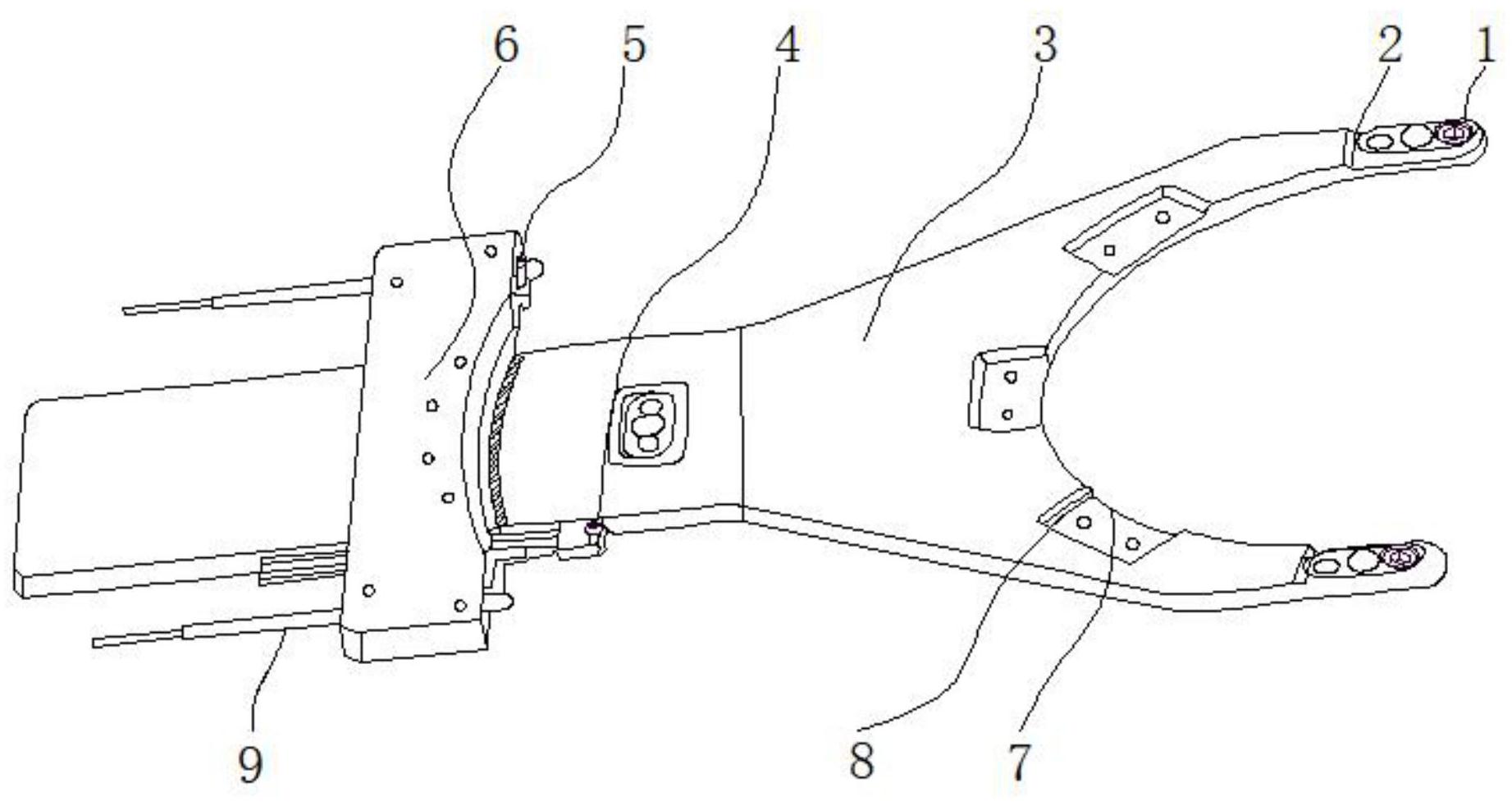
本发明涉及一种基于机械手手指的新型晶圆固定和检测方式,包括固定块、第一传感器和固定架,所述固定块的内部连接有摩擦块架,且摩擦块架外部一侧设置有手指,所述手指的内部安置有夹持架,且夹持架的顶端外部四周固定有防护板,所述手指的一侧设置有固定架,且固定架 全部
背景技术:
机械手从载料台的晶圆盒中取出晶圆,放置到校准装置上,校准装置检测晶圆缺 口,计算出晶圆圆心,将晶圆移动到制定角度和位置。校准合格后,再利用机械手取出晶圆, 然后搬运到用于处理晶圆的下一道工序。在晶圆的搬运过程中,机械手的手指承载晶圆,通 常情况下采用真空吸附方式固定晶圆。 市场上的机械手搬运晶圆在实际生产过程中发现,真空吸附方式很大程度上取决 于气源系统是否稳定,如果气源系统不稳定,系统会频繁报警,而且手指与晶圆接触面积 大,机械手工作一段时间后,手指上会落灰有杂质,会污染晶圆表面,严重影响工艺制程的 问题。
技术实现要素:
本发明的目的在于提供一种基于机械手手指的新型晶圆固定和检测方式,以解决 上述











