
技术摘要:
本发明提出一种实时高动态成像方法及成像系统,解决现有动态范围扩展方法无法满足对实时性要求较高、延时较小的应用场合,以及存在计算结果有较大误差、高动态图像模糊的问题。该方法包括:步骤一、图像探测器输出高、低增益图像数据;步骤二、对高、低增益图像数据进 全部
背景技术:
真实场景的动态范围是指场景中最亮处与最暗处的照度比值,常用对数表示,单 位为dB。自然界的照度范围覆盖非常广,最大动态范围高达160dB,而人眼可感知的动态范 围可达100dB。 图像的动态范围是表征成像系统成像质量的一个重要参数,目前大多数数字成像 系统仍为8比特量化显示,其输出的图像只能记录有限范围的灰阶和颜色等级,动态范围只 有两个数量级,远小于常见自然场景的动态范围以及人眼可感知的动态范围,成像系统的 动态范围的不足严重影响了其应用范围。鉴于此,需要对数字成像系统的动态范围进行扩 展,从而获得高动态范围的图像。扩展数字成像系统的动态范围,即高动态范围(HDR)成像 技术,一般通过采用硬件和/或软件的方法,使数字成像系统的输出图像涵盖尽可能大的拍 摄场景照度范围,并准确地再现真实场景的细节信息。 现有动态范围扩展方法主要包括硬件扩展方法和软件扩展方法。其中硬件扩展方 法主要采用高动态范围的图像探测器(CCD/CMOS SENSOR)进行成像系统的设计,受限于工 艺水平和设计复杂度,基于硬件的动态范围扩展方法短期内无法获得较大的突破。软件扩 展方法主要包括基于成像系统响应函数的辐照度重建和多次曝光图像融合的方法,这两种 方法都需要采集多幅不同曝光度的低动态范围图像,因而无法满足对实时性要求较高、延 时较小的应用场合,且在拍摄过程中相机抖动或拍摄物体微小移动都会造成计算结果的较 大误差或造成融合后的高动态图像模糊,这些不足限制了基于软件方法的动态范围扩展方 法在航空、航天以及工业中的应用。
技术实现要素:
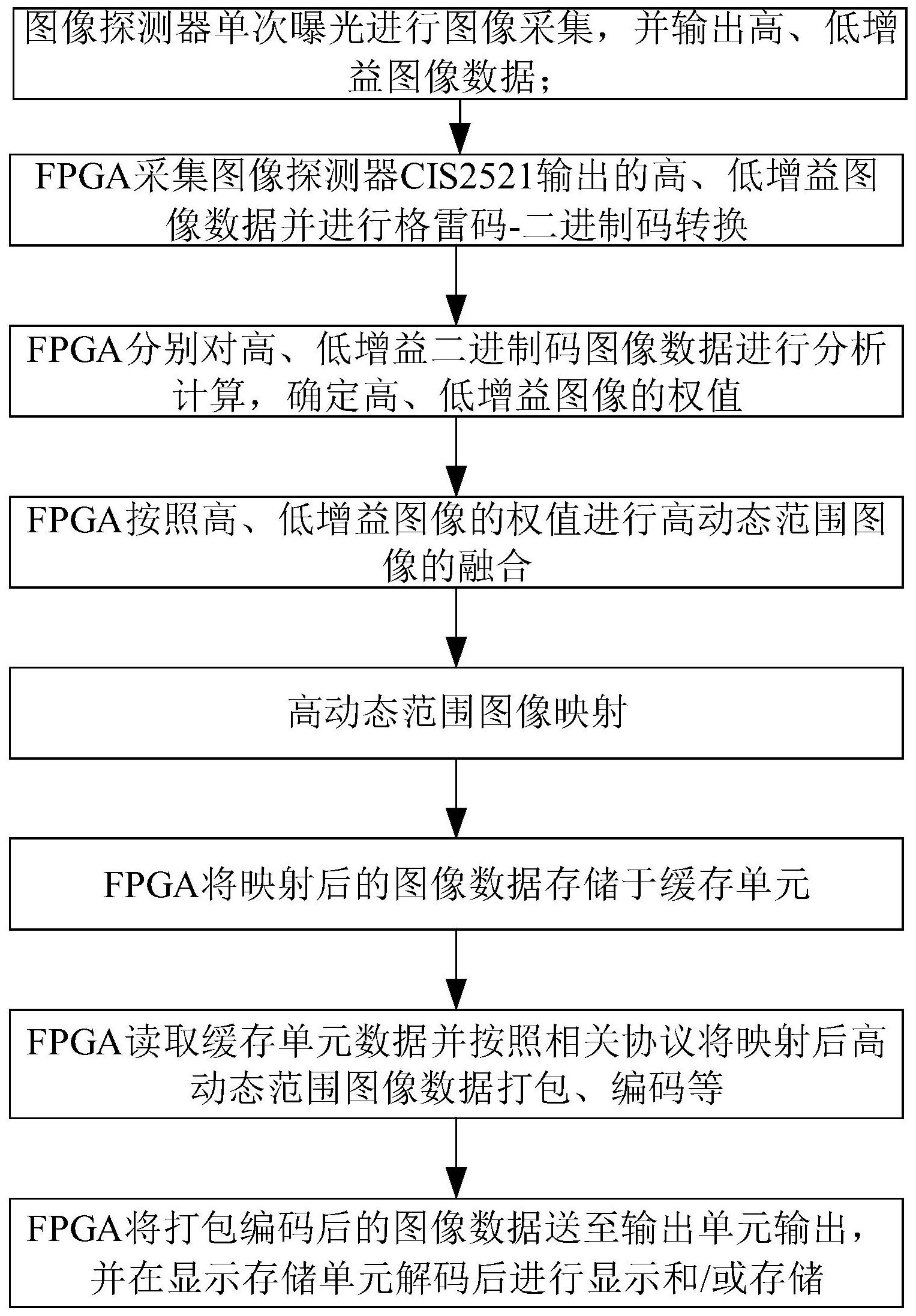
本发明的目的在于解决现有动态范围扩展方法无法满足对实时性要求较高、延时 较小的应用场合,以及存在计算结果有较大误差、高动态图像模糊的问题,提出一种实时高 动态成像方法及成像系统,该方法和系统在现有具备高、低增益双通道同时输出的图像探 测器的基础上,结合其输出的高、低增益两个输出通道的图像数据,将高、低增益图像按照 计算的权重比例进行加权融合,得到高动态范围图像。 为实现上述目的,本发明的技术方案是: 一种实时高动态成像方法,包括以下步骤: 步骤一、图像探测器单次曝光进行图像采集,并输出高、低增益图像数据,所述图 像探测器为具备高、低增益双通道同时输出的图像探测器; 步骤二、对图像探测器输出的高、低增益图像数据进行格雷码-二进制码转换,得 到高、低增益二进制码图像数据; 4 CN 111586310 A 说 明 书 2/5 页 步骤三、对高、低增益二进制码图像数据进行分析计算,获得高、低增益图像的权 值; 3.1)实时计算高、低增益二进制码图像的亮度均值; 其中,uLG为低增益图像的亮度均值;uHG为高增益图像的亮度均值,Data_LG_B表示 低增益二进制码图像;Data_HG_B表示高增益二进制码图像;(x,y)表示像素点在图像中的 位置坐标; 3 .2)根据曝光适度的评价方法,计算高增益图像的权值wHG和低增益图像的权值 wLG; 其中,Imax为图像的最大亮度值; 步骤四、按照高、低增益图像的权值进行高动态范围图像的融合; Dataout(x,y)=wLG×Data_LG_B(x,y) wHG×Data_HG_B(x,y)) 为防止输出图像数据出现溢出的情况,对输出值进行限制: 步骤五、对融合后的高动态图像数据进行高动态范围图像映射; 步骤六、将映射后高动态范围图像数据存储于缓存单元; 步骤七、读取缓存单元的数据并将映射后的高动态范围图像数据打包、编码; 步骤八、将打包编码后的图像数据送至输出单元输出,并在显示存储单元解码后 进行显示和/或存储。 进一步地,步骤五中,采用GIMP的方法进行高动态范围图像映射,将11bit位深图 像映射至8bit位深。 同时,本发明还提供了一种实时高动态成像系统,包括图像探测器、图像探测器驱 动电路、FPGA、缓存单元、输出单元和显示存储单元;所述图像探测器进行光电转换,将拍摄 场景的反射光信号转换为数字视频信号输出;所述图像探测器驱动电路与图像探测器连 接,用于提供工作电压给图像探测器;所述FPGA与图像探测器连接,用于产生图像探测器的 工作时序、对图像探测器输出的图像数据进行采集和处理;FPGA对图像探测器输出的图像 数据进行采集和处理时执行权利要求1或权利要求2中的步骤二至步骤八;所述缓存单元与 5 CN 111586310 A 说 明 书 3/5 页 FPGA连接,用于缓存FPGA采集的低动态范围图像;所述输出单元与FPGA连接,用于将高动态 图像通过硬件接口输出;所述显示存储单元与输出单元连接,用于将高动态图像进行显示 和/或存储。 进一步地,所述图像探测器为仙童公司的CIS2521图像探测器,实现2560×2160, 100帧/秒的图像采集。 进一步地,所述输出单元为Camera-link或USB3.0接口电路。 进一步地,所述缓存单元为DDR3或DDR4缓存芯片。 进一步地,所述显示存储单元为包含图像采集、解码、显示和存储功能的计算机主 机和显示器。 与现有技术相比,本发明技术方案具有以下优点: 1 .本发明实时高动态成像方法及成像系统中,图像探测器同时输出高、低增益两 幅低动态范围图像,不需要多次曝光拍摄,成像系统延迟较小,实时性较高。 2.本发明实时高动态成像方法及成像系统中,由于高、低增益两幅低动态范围图 像由单次曝光同时获得,两幅图像之间不存在相对运动,不会造成融合后图像模糊。 3.本发明实时高动态成像方法及成像系统中,实时计算高、低增益两幅图像的亮 度均值,并根据曝光适度评价方法确定其权值,而非采用固定的权值进行高动态范围图像 的融合,可使得融合后图像的动态范围最大化。 4.本发明实时高动态成像方法及成像系统中,图像探测器的高、低增益在模拟信 号端放大,对噪声的放大较小,不会对融合后的图像信噪比产生很大影响。 5.在航空航天领域,由于成像与拍摄目标存在快速的相对运动需采用较短的曝光 时间,而本发明方法和系统即使拍摄时采用较短的曝光时间,亦可得到较高动态范围的图 像,并凸显拍摄场景的细节信息。 附图说明 图1是本发明实时高动态成像系统的结构框图; 图2是本发明实时高动态成像方法的流程图; 图3是图像探测器CIS2521的输出结构框图; 图4是图像探测器CIS2521输出1x增益原始图像; 图5是图像探测器CIS2521输出10x增益原始图像; 图6是采用本发明方法获得的高动态范围图像。











