
技术摘要:
本发明公开了一种电动汽车的自动泊车控制方法、装置、设备和泊车系统,涉及自动驾驶技术领域,所述方法包括:响应于自动泊车指令获取所述电动汽车的电源状态参数和道路坡度,所述电源状态参数包括蓄电池的输出电压和动力电池的荷电量;若所述蓄电池的输出电压大于等于 全部
背景技术:
相较于传统汽车,纯电动汽车对环境的影响较小,是当前车辆技术发展的主要趋 势,其动力输出源于驱动电机,易于精细控制,信号误差更小,因此电动汽车更适应自动泊 车等自动驾驶技术。但驱动电机由动力电池供电,当供电系统失效时,若车辆处于自动泊车 状态,存在车辆失控风险。 因此,针对上述技术问题,需要改进用于电动汽车的自动泊车的控制策略,以提升 行车安全和用户体验。
技术实现要素:
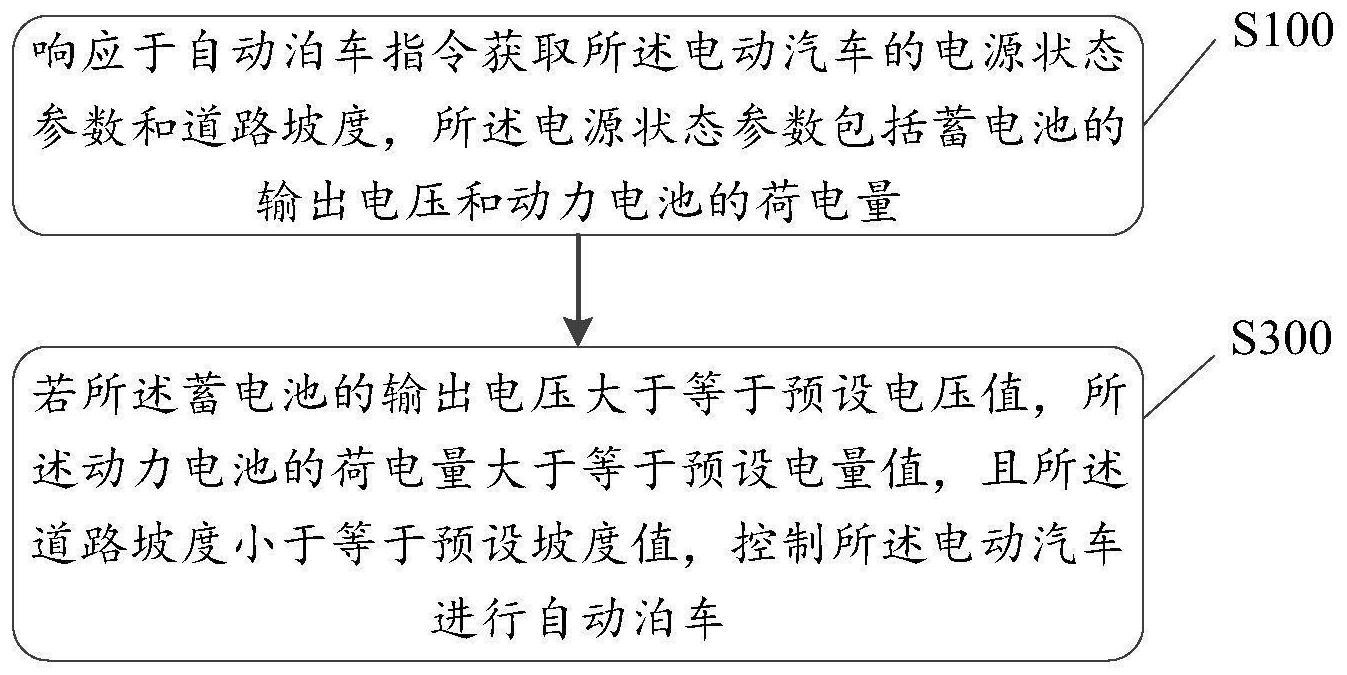
本发明提供了一种电动汽车的自动泊车控制方法、装置、设备和泊车系统,可以提 高行车安全,改善用户体验。 第一方面,本发明提供了一种电动汽车的自动泊车控制方法,所述方法包括: 响应于自动泊车指令获取所述电动汽车的电源状态参数和道路坡度,所述电源状 态参数包括蓄电池的输出电压和动力电池的荷电量; 若所述蓄电池的输出电压大于等于预设电压值,所述动力电池的荷电量大于等于 预设电量值,且所述道路坡度小于等于预设坡度值,控制所述电动汽车进行自动泊车。 另一方面,本发明提供了一种电动汽车的自动泊车控制装置,所述装置包括: 获取模块:用于响应于自动泊车指令获取所述电动汽车的电源状态参数和道路坡 度,所述电源状态参数包括蓄电池的输出电压和动力电池的荷电量; 控制模块:若所述蓄电池的输出电压大于等于预设电压值,所述动力电池的荷电 量大于等于预设电量值,且所述道路坡度小于等于预设坡度值,控制所述电动汽车进行自 动泊车。 另一方面,本发明提供了一种电动汽车的自动泊车控制设备,包括处理器和存储 器,其特征在于,所述存储器中存储有至少一条指令或代码,所述至少一条指令或代码由所 述处理器加载并执行以实现如上述的电动汽车的自动泊车控制方法。 另一方面,本发明提供了一种电动汽车的泊车系统,包括上述的自动泊车控制装 置或自动泊车控制设备。 另一方面,本发明提供了一种电动汽车,包括如上所述的自动泊车控制设备或自 动泊车控制装置。 本发明提供的电动汽车的自动泊车控制方法、装置、设备和泊车系统,具有如下技 术效果: 本发明在确定蓄电池的输出电压大于等于预设电压值,动力电池的荷电量大于等 4 CN 111605546 A 说 明 书 2/7 页 于预设电量值,且道路坡度小于等于预设坡度值的状态下执行自动泊车指令,降低由于供 电系统失效和道路坡度造成的自动泊车失控风险,提高行车安全,改善用户体验。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施 例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅 仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下, 还可以根据这些附图获得其它附图。 图1是本发明实施例提供的一种电动汽车的自动泊车控制方法的流程示意图; 图2是本发明实施例提供的一种电动汽车的电源动力系统的结构示意图; 图3-4是本发明实施例提供的非坡道和坡道场景下自动泊车的风险示意图; 图5是本发明实施例提供的自动泊车控制方法的时序图; 图6是本发明实施例电动汽车的电源失效情况下的动力驱动系统结构示意图; 图7是本发明实施例提供的在电机控制器进入ASC模式后产生的转矩曲线和电流 曲线; 图8是本发明实施例提供的一种电动汽车的自动泊车控制装置的结构示意图。











