
技术摘要:
本发明涉及一种酒业自动上甄环节的机器人,特别涉及一种水平关节机器人的小臂结构。包括大臂、小臂、减速机及驱动电机,其中减速机设置于大臂上、且输出轴与小臂连接,驱动电机设置于小臂上、且输出轴与减速机的减速机输入轴连接,减速机输入轴与小臂转动连接,减速机 全部
背景技术:
上甄机器人系统,用于酒业行业的自动上甄环节应用,其作为整体项目的重要组 成部分,上甄机器人系统中的一种水平关节机器人的小臂结构。由于上甄机器人系统为自 动上甄设备组成之一,需配合混料机、输送机、自动开关甄锅盖、自动蒸汽控制系统一起完 成一套完整的酒料自动上甄、蒸馏工作。上甄机器人系统包含:四轴主体机器人系统、大小 臂及末端送料机系统、红外传感系统、超声波系统。具体工作时,四轴机器人关节负责甄锅 内的铺料轨迹实现,大小臂及末端送料机负责将酒料均匀的输送至甄锅内铺料轨迹上,同 时辅以红外传感系统及超声波系统进行上料过程中的探气检测与高度检测避免串气与酒 料密度层叠不均匀。 对于含有蒸汽环节的食品级机器人应用常规的小臂结构环境适应性欠缺。由于水 平关节机器人的小臂结构关节的减速机的唇形密封圈的密封是通过其唇口在液压力的作 用下变形,使唇边紧贴密封面而实现的。液压力越高,唇边与密封面贴得就越紧,密封唇边 磨损后,具有一定自动补偿的能力。这种密封圈常用于往复动和旋转密封。为了保证液压系 统良好的密封性,对密封装置的基本要求如下,有相对运动时,由密封件引起的摩擦力要 小,摩擦系数要稳定,在一定的压力和温度范围内具有良好的密封性能,并能随压力的增大 自动地提高密封程度,结构简单,使用及维修方便,成本低,抗腐蚀能力强,不易老化,耐磨 性要好,磨损后在一定程度上能自动补偿,工作寿命长。由于上甄机器人系统对油脂对外泄 露的零容忍,及外部环境粉尘的影响,所以急需一种水平关节机器人的小臂结构满足使用 要求。
技术实现要素:
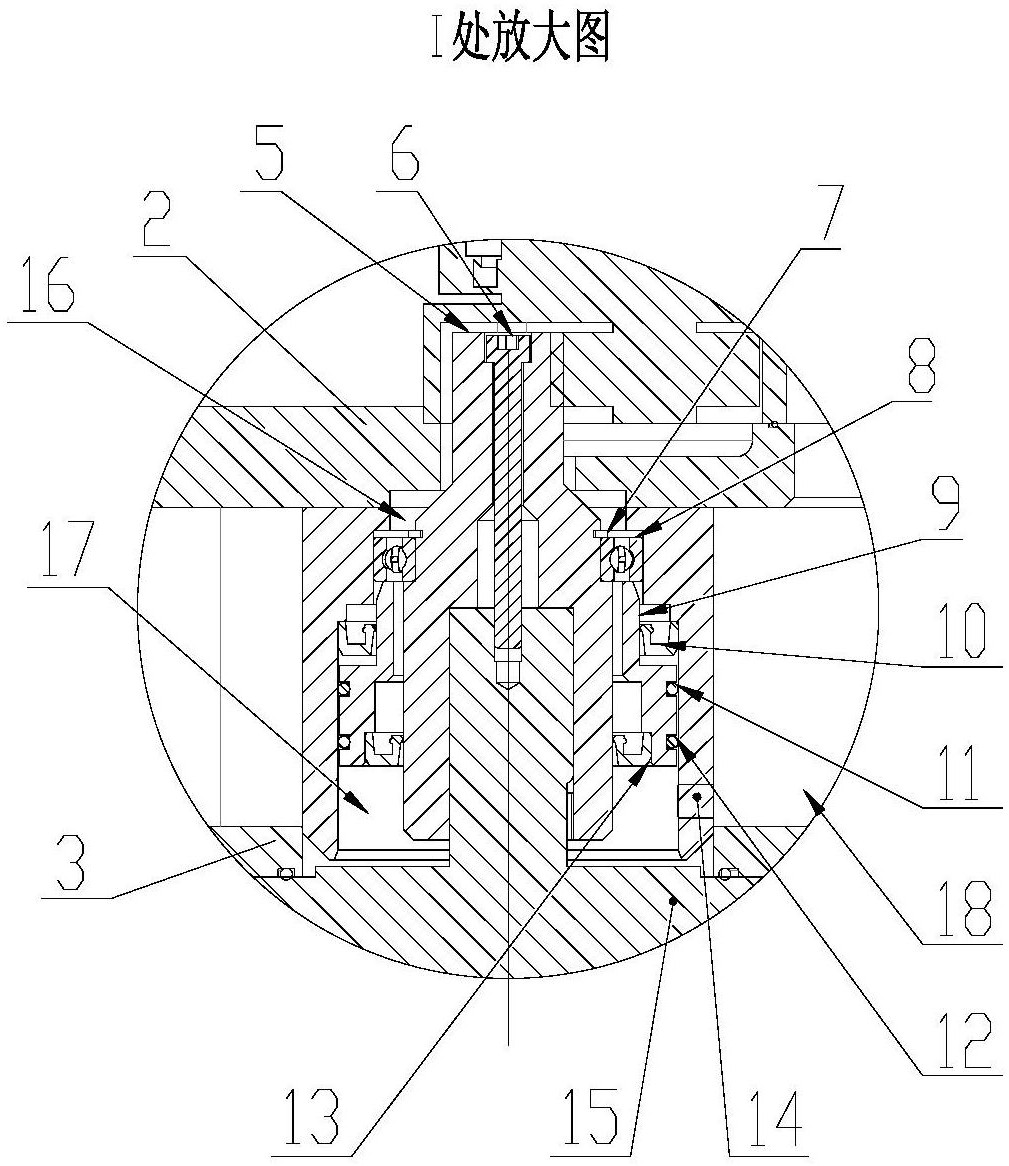
针对上述问题,本发明的目的在于提供一种水平关节机器人的小臂结构,以保证 液压系统良好的密封性及满足密封装置的基本要求。 为了实现上述目的,本发明采用以下技术方案: 一种水平关节机器人的小臂结构,包括大臂、小臂、减速机及驱动电机,其中减速 机设置于所述大臂上、且输出轴与小臂连接,所述驱动电机设置于所述小臂上、且输出轴与 所述减速机的减速机输入轴连接,所述减速机输入轴与所述小臂转动连接,所述减速机输 入轴与所述小臂之间设有浮动补充装置,所述浮动补充装置用于在所述减速机工作速度和 温度改变引起对所述减速机内的润滑油脂的体积膨胀或收缩进行动态补偿。 所述浮动补充装置包括浮动套、外侧唇形密封圈、内侧唇形密封圈及O型密封圈, 其中浮动套套设于所述减速机输入轴的外侧、且具有沿轴向运动的自由度,所述浮动套的 外圆周通过O型密封圈与所述小臂密封连接,所述外侧唇形密封圈和内侧唇形密封圈分别 3 CN 111571635 A 说 明 书 2/4 页 设置于所述浮动套的两端,并且所述外侧唇形密封圈套设于所述浮动套的外侧,所述内侧 唇形密封圈嵌设于所述浮动套的内侧。 所述外侧唇形密封圈的外侧与所述小臂弹性静密封连接,内侧与所述浮动套的旋 转圆柱副动密封连接。 所述内侧唇形密封圈的外侧与所述浮动套弹性静密封连接,内侧与所述减速机输 入轴的旋转圆柱副动密封连接。 所述减速机输入轴通过轴承与所述小臂连接,所述轴承的外侧固定端与所述小臂 过渡配合,所述轴承的内圈通过设置于所述减速机输入轴上的卡簧轴向限位。 所述减速机输入轴通过电机锁定螺钉固定在所述驱动电机的输出轴上。 所述小臂上沿垂直于所述小臂方向设有浮动补充装置容置腔,所述减速机输入轴 和所述浮动补充装置容置于所述浮动补充装置容置腔内,所述浮动补充装置容置腔的侧壁 上设有位于所述浮动补充装置外侧的纳米粉尘空气过滤塞。 所述小臂和所述大臂平行设置。 本发明的优点及有益效果是:本发明在食品级对关节减速装置的要求下,利用浮 动环解决传动系统压力和温度平衡、旋转密封、粉尘污染的问题。 本发明有助于关节减速机构的小型化,及有助于关节减速机机构散热和温度稳 定。 本发明有助于提高设备的洁净等级。 附图说明 图1为本发明的轴测图; 图2为本发明的主视图; 图3为图2的俯视图; 图4为图3的A-A剖视图; 图5为图4的I处放大图。 图中:1为底座,2为大臂,3为小臂,4为减速机,5为减速机输入轴,6为电机锁定螺 钉,7为卡簧,8为轴承,9为浮动套,10为外侧唇形密封圈,11为上侧O型密封圈,12为下侧O型 密封圈,13为内侧唇形密封圈,14为纳米粉尘空气过滤塞,15为驱动电机,16为润滑油脂,17 为内部空间,18为外部空间。











