
技术摘要:
本发明提供一种基于局部形变轮廓匹配的包装袋图像配准方法,属于机器视觉领域,本发明针对没有固定形状的包装袋,通过轮廓提取、轮廓网格化、轮廓平滑、轮廓配准实现了在粗略定位的基础上对可形变的物体进行精确定位,提高了定位精度,对包装袋的形变和边缘遮挡缺失也 全部
背景技术:
产品生产最后都需要对产品进行装箱,对一些有固定形状的物体比如魔方,可以 直接采用模型匹配的方式进行定位,精度也较高,但是对一些没有固定形状的物体比如袋 装方便面,直接采用模型匹配的方式不仅精度较低还有可能出现匹配失败的情况。 公开号为CN104835156A的专利公开了一种基于计算机视觉的无纺布袋自动定位 方法,通过计算无纺布袋四个角落的位置和无纺布袋的偏转角度,完成对无纺布袋的定位。 定位结果包括四角、边线和旋转角度,但是对变形的鲁棒性差,也无法很好的应对边线缺失 的情况。 公开号为CN109584216A的专利公开了一种面向机器人抓取作业的可变形料袋视 觉识别与定位方法,对料袋的形变具有一定的鲁棒性,但需要对料袋本身进行加工,推广成 本高。
技术实现要素:
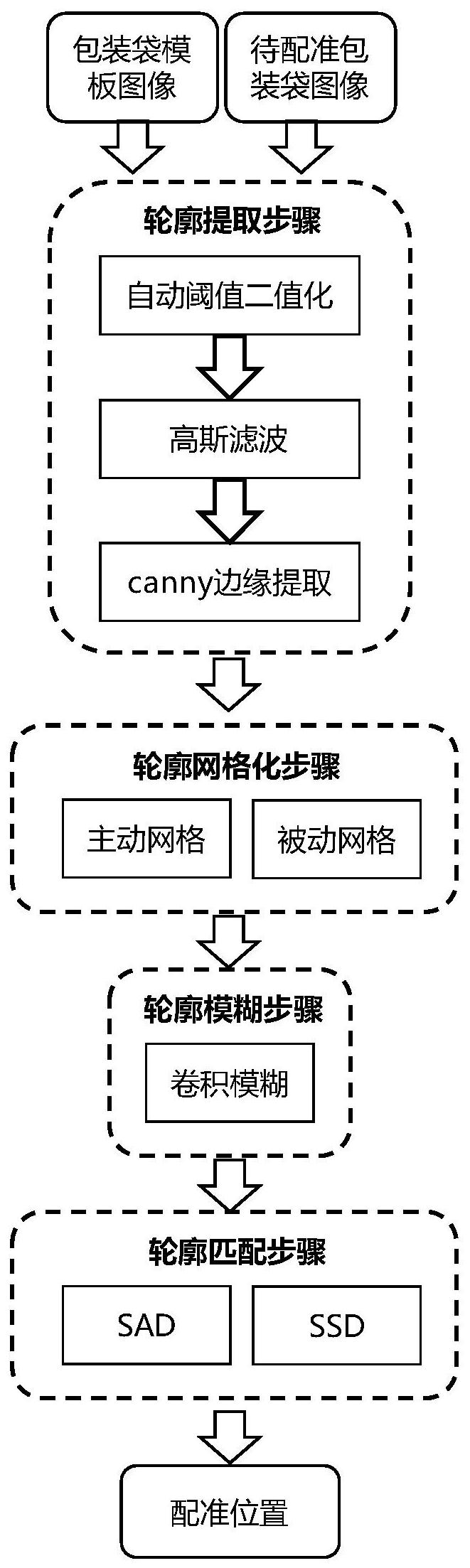
为了解决以上技术问题,本发明提供了一种基于局部形变轮廓匹配的包装袋图像 配准方法,可以在粗略定位的基础上对可形变的物体进行精确定位。 本发明的技术方案是: 一种基于局部形变轮廓匹配的包装袋图像配准方法,包括: 轮廓提取步骤:对包装袋模板图像和待配准包装袋图像进行四周轮廓提取。 轮廓网格化步骤:对轮廓提取步骤获得的轮廓进行网格化操作。 轮廓平滑步骤:对轮廓网格化步骤获得的网格图像进行模糊平滑。 轮廓配准步骤:分别对网格图像进行配准,进而得到整体的配准结果。 进一步的,所述轮廓提取步骤包括: 二值化步骤:对输入图像进行二值化,获得黑白两色图像。 高斯滤波步骤:对二值化步骤获得的黑白两色图像进行高斯滤波,滤除噪声。 边缘提取步骤:采用canny边缘检测算法提取图像边缘,进行轮廓拟合。 进一步的,所述二值化步骤包括: 二值化阈值提取步骤:采用改进的otsu算法计算二值化阈值。 自动阈值二值化步骤:根据二值化阈值对图像进行二值化。 进一步的,所述轮廓网格化步骤将轮廓划分为主动网格和被动网格。 进一步的,所述主动网格为模板中包含轮廓的部分,负责主动形变来配准待配准 轮廓,若主动网格在对应位置无法配准,即发生待配准包装袋部分边缘特征缺失的情况,则 变为被动网格。 4 CN 111583319 A 说 明 书 2/4 页 进一步的,被动网格包含模板中不包含轮廓的部分及退化的主动网格,负责跟随 主动网格的形变,从而保证整个轮廓的大致形状。 进一步的,所述轮廓平滑步骤采用将原图像与滤波器进行卷积的方式进行图像平 滑。 进一步的,所述轮廓平滑步骤采用的卷积核为: 进一步的,所述轮廓配准步骤包括: 主动网格配准步骤:模板轮廓主动网格配准待配准图像网格。 被动网格验证步骤:根据被动网格平移量验证主动网格配准结果。 配准组合步骤:根据各个主动网格配准结果组合获得包装袋图像配准结果。 进一步的,所述主动网格配准步骤将模板图像主动网格在待配准图像初始配准区 域中不断平移,在每一个平移位置计算模板图像与平移子图的相似度,作为配准分数,遍历 配准区域,将最高的配准分数位置作为目标位置。 进一步的,所述主动网格配准步骤相似度度量方程有差值绝对值之和: 和差值平方: 两种方式。 进一步的,所述主动网格配准骤中初始配准区域为网格大小的三倍。 进一步的,所述主动网格配准步骤中若主动网格在配准区域中无法配准或配准分 数低,则将该主动网格视为被动网格。 进一步的,所述被动网格验证步骤根据主动网格配准后的被动网格需要平移的范 围判断是否超过配准区域,若超过配准区域,则缩小初始配准区域大小,重新进行主动网格 配准步骤。 本发明的有益效果是 在粗略定位的基础上对可形变的包装袋进行精确定位,提高了定位精度,对包装 袋的形变和边缘遮挡缺失也具有鲁棒性。 附图说明 图1是本发明的工作流程示意图。











