
技术摘要:
本发明开发了一种基于风险动态平衡的无信号交叉口自动驾驶运动规划方法。方法包括:(1)基于无信号交叉口车辆轨迹预测模型完成对无信号交叉口内其它运动车辆行驶轨迹预测;(2)通过无信号交叉口风险场模型构建该无信号交叉口中随时空变化的动态风险场;(3)基于无信号交叉 全部
背景技术:
随着人工智能、无线通信、信息化等技术的快速发展,载运工具进入了智能化时 代。在自动驾驶众多核心技术模块中,运动规划模块是体现自动驾驶车辆智能水平的关键 因素,直接决定了自动驾驶车辆的具体行为,而对行车安全风险建模则是自动驾驶汽车自 主决策与运动规划的基础,直接影响着运动规划路径的安全与效率。 国内外对行车安全风险建模进行了大量的研究。其中主要是使用时间距离和空间 距离描述车辆之间相对运动关系,评估横纵向行车风险。时间距离常用的指标包括TTC (Time to Collision)、TH(Time Headway) 及其衍生指标。Charly等人使用一种基于TTC改 进的行车风险指标,来识别不同类型车辆之间可能存在的冲突。Ali等人在网联环境下使用 最小间隙时间量化换道过程中的安全性。鲁光泉等人在车车信息交互条件下,设计了一种 衍生指标安全裕度,量化了驾驶人跟驰过程中主观感受到的危险程度。Ryan等人提出一种 基于驾驶行为和关键性安全事件的自动驾驶车辆行驶风险评估方法,并利用自然驾驶数据 识别行为热点,通过自组织地图识别相似的风险群体。李亚勇等人把前后两辆车看作两个 势场中心,考虑前后方车辆的位置和速度,评估车辆在拥挤工况下的纵向安全性。Li等人为 适应不同的道路线形,基于势场理论引入椭圆行车安全场,考虑车道线的切线方向和法线 方向对行车风险的影响差异,评估了不同场景下的行车风险。 然而,上述的研究多针对车辆安全控制以及道路安全评估等较为单一目标,未能 从人-车-路系统的角度出发,综合的分析人-车-路系统中不同的要素对车辆运动规划路径 风险的影响。为了解决该问题,国内外逐渐将场论应用于人-车-路系统中风险的描述。Wolf 等人利用汤川势和电场思想,建立自车与他车的势能场,对跟驰、超车等典型场景下的防撞 路径规划进行研究,但是在该研究结果仅能适用于部分简化的特定场景中。王建强等人提 出了考虑人-车-路因素的行车安全场理论,用场强、场力和势能等物理量来描述车辆行驶 风险,并基于安全势能及其时间变化率建立了安全场联合模型,但是该安全场联合模型只 能为行车安全提供辅助,无法为复杂环境的安全评估提供准确的依据,并且其模型过于追 求绝对的安全,没有考虑自动驾驶车辆的可接受风险水平,导致行车安全与效率的失衡。 目前,已有的研究多聚焦于简单场景中交通要素描述和行车安全风险评价,而无 信号交叉口作为典型的复杂交通场景,已有研究结果很难适应无信号交叉口的环境。除此 之外,已有的无信号交叉口自动驾驶运动规划较少考虑了自动驾驶车辆对于风险的可承受 能力以及运动规划路径中的风险与效率平衡的问题。因此,如何运用动态运动数据实现无 信号交叉口场景的层次化建模,如何在人-车-路协同条件下综合评估无信号交叉口中动态 交通环境对行车安全的影响,如何考虑运动规划路径安全与效率的平衡,都是亟待解决的 5 CN 111599179 A 说 明 书 2/7 页 问题。
技术实现要素:
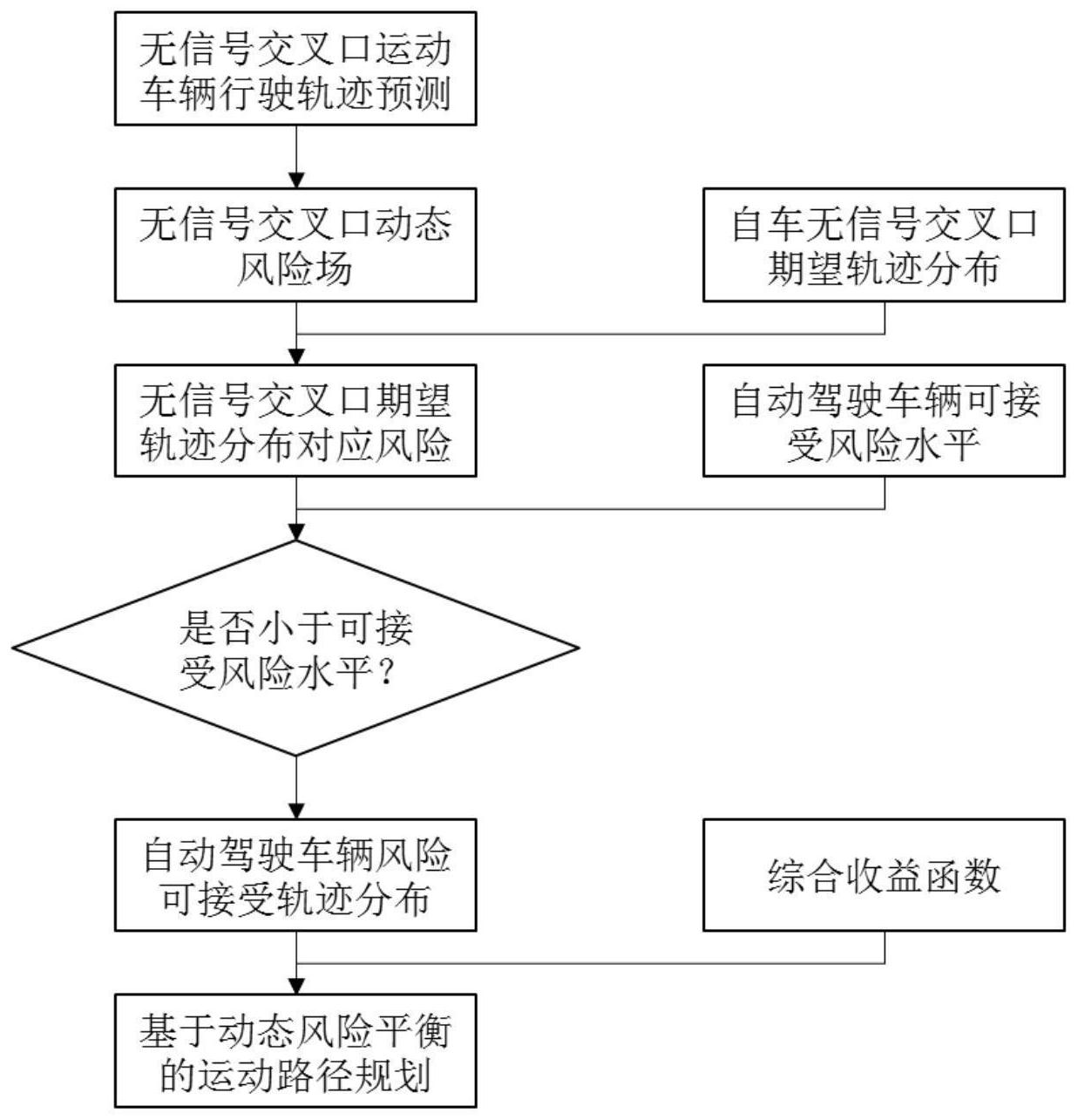
针对上述问题,本发明旨在提供一种能够为自动驾驶系统提供无信号交叉口环境 下行车风险识别和轨迹分布选择的基于风险动态平衡的无信号交叉口自动驾驶运动规划 方法 为实现上述目的,本发明提供一种基于风险动态平衡的无信号交叉口自动驾驶运 动规划方法,所述基于风险动态平衡的无信号交叉口自动驾驶运动规划方法包括如下步 骤: 步骤1,通过自动驾驶车辆自身传感器以及通过车联网获取无信号交叉口内静态 环境要素信息以及其它运动车辆状态数据,结合无信号交叉口车辆轨迹预测模型完成无信 号交叉口中的其它车辆行驶轨迹预测; 步骤2,基于无信号交叉口风险场模型,结合步骤1获得的无信号交叉口内静态环 境要素信息和其它运动车辆行驶轨迹数据,构建该无信号交叉口中随时空变化的动态风险 场; 步骤3,基于无信号交叉口车辆期望轨迹分布模型,结合自车期望和步骤1获得的 无信号交叉口内静态环境要素信息,得到自动驾驶车辆在该无信号交叉口中的期望轨迹分 布; 步骤4,将步骤3获得的自动驾驶车辆在该无信号交叉口中的期望轨迹分布代入步 骤2获得的动态风险场,确定期望轨迹分布中不同期望轨迹对应的风险值; 步骤5,基于车辆可接受风险水平模型,考虑到通信延迟,其它运动车辆轨迹预测 误差等因素的影响,确定自动驾驶车辆的可接受风险水平; 步骤6,将步骤4获得的不同期望轨迹对应的风险值与步骤5获得的自动驾驶车辆 的可接受风险水平进行比较,筛选得到自动驾驶车辆可接受风险轨迹分布; 步骤7,通过综合收益函数确定步骤6获得的自动驾驶车辆可接受风险轨迹分布不 同轨迹的综合收益,并选择其中综合收益最高的一条轨迹作为本次基于风险动态平衡理论 的无信号交叉口自动驾驶的运动轨迹规划。 进一步地,步骤1中“行驶轨迹预测”的获得方法包括如下步骤: 步骤11,通过自动驾驶车辆自身传感器以及通过车联网获取所需的基本数据,包 括该无信号交叉口的形状,大小,以及交叉口内运动物体在初始t0时刻的横纵向位置(x (t0) ,y(t0)),横纵向速度(vx(t0) ,vy(t0)),横纵向加速度(ax(t0) ,ay(t0))以及横摆角ψ(t0)。 步骤12,建立如下的无信号交叉口车辆轨迹预测模型: SP(xp,yp,vp,x,vp,y,ap,x,ap,y,ψp,t)=fP(type,x(t0) ,y(t0) ,vx(t0) ,vy(t0) ,ax(t0) , ay(t0) ,ψ(t0)) 式中,type是指预测车辆的类型,(x(t0) ,y(t0))是指初始t0时刻预测车辆所在的 横纵向位置,(vx(t0) ,vy(t0)) 是指初始t0时刻预测车辆的横纵向速度,(ax(t0) ,ay(t0))是 指初始t0时刻预测车辆的横纵向加速度,ψ(t0)是指初始t0时刻预测车辆的横摆角。 步骤13,将获取的基本数据与无信号交叉口车辆轨迹预测模型结合,得到该无信 号交叉口内所有其它运动车辆的行驶轨迹SP。 6 CN 111599179 A 说 明 书 3/7 页 进一步地,步骤2中“动态风险场”的获得方法包括如下步骤: 步骤21,考虑无信号交叉口中的静态交通环境要素对自动驾驶车辆的约束形式、 约束强度和约束范围,从而确定无信号交叉口内静态交通环境要素周围风险场模型: Re(xe,ye,t)=fe(type,length,width,height) 式中,type是指该静态环境要素的类型,length是指该静态环境要素的长度, width是指该静态环境要素的宽度,height是指该静态环境要素的高度;RE(x1,y1,t)RE(x1, y1,t) 步骤22,考虑无信号交叉口中的其它车辆对自动驾驶车辆的约束形式、约束强度 和约束范围,从而确定无信号交叉口内运动物体周围风险场模型: Rv(xv,yv,t)=fv(length,width,x(t) ,y(t) ,vx(t) ,vy(t) ,ax(t) ,ay(t) ,ψ(t)) 式中,length是指该车辆的长度,width是指该车辆的宽度,(x(t) ,y(t))是指该车 辆随时间变化的空间位置, (vx(t) ,vy(t))是指该车辆随时间变化的运动速度,(ax(t) ,ay (t))是指该车辆随时间变化的加速度,ψ(t)是指该车辆随时间变化的横摆角; 步骤23,将上述步骤得到的风险场模型根据如下坐标系变化公式转移到同一坐标 系中: 式中,(xi,yi)是指坐标点在第i个单独要素风险场模型坐标系中的坐标位置,(x, y)为坐标点在最终统一的xoy坐标系下的坐标位置,(Δx(i) ,Δy(i) ,α(i))为第i个单独要 素风险场模型坐标系相对于最终统一的xoy 坐标系的位置以及旋转角; 步骤24,将所有单独要素风险场模型进行叠加,得到该无信号交叉口内的动态风 险场: 式中,Re ,1(x,y,t)为第1个静态环境要素在t时刻对坐标点(x,y)施加风险值,Rv,1 (x,y,t)为第1个车辆在t 时刻对坐标点(x,y)施加风险值,n1为该无信号交叉口中静态环 境要素的数量,n2为该无信号交叉口中行驶车辆的数量; 进一步地,步骤3中“期望轨迹分布”的获得方法包括如下步骤: 步骤31,确定自动驾驶车辆在该无信号交叉口的行驶方向,例如直行,左转或右 转; 步骤32,建立如下的无信号交叉口自动驾驶车辆期望轨迹分布模型: 其中,无信号交叉口中自动驾驶车辆直行的期望轨迹分布模型为: TS(x,y ,vx ,vy ,ax ,ay ,ψ,t)=fS(Si ,Ae ,Al ,x(t0) ,y(t0) ,vx(t0) ,vy(t0) ,ax(t0) ,ay (t0) ,ψ(t0)) 其中,无信号交叉口中自动驾驶车辆左转的期望轨迹分布模型为: TL(x,y ,vx ,vy ,ax ,ay ,ψ,t)=fL(Si ,Ae ,Al ,x(t0) ,y(t0) ,vx(t0) ,vy(t0) ,ax(t0) ,ay (t0) ,ψ(t0)) 其中,无信号交叉口中自动驾驶车辆右转的期望轨迹分布模型为: TR(x,y ,vx ,vy ,ax ,ay ,ψ,t)=fR(Si ,Ae ,Al ,x(t0) ,y(t0) ,vx(t0) ,vy(t0) ,ax(t0) ,ay (t0) ,ψ(t0)) 7 CN 111599179 A 说 明 书 4/7 页 式中,Si为该交叉口形状,Ae是指车辆进入交叉口的进入车道所在坐标范围 Al是指车辆离开交叉口可能的离开车道坐标范围,(x(t0) ,y(t0))是指初始t0时刻车辆所在 的横纵向位置,(vx(t0) ,vy(t0))是指初始t0时刻车辆的横纵向速度,(ax(t0) ,ay(t0))是指初 始t0时刻车辆的横纵向加速度,ψ(t0)是指初始t0时刻车辆的横摆角。 步骤33,将获得的自车当前状态数据以及该无信号交叉口静态环境要素信息与期 望轨迹分布模型结合,得到自动驾驶车辆在该无信号交叉口的期望轨迹分布T0(x,y,vx,vy, ax,ay,ψ,t)。 进一步地,步骤4中的“不同期望轨迹对应的风险值”的获得方法包括如下步骤: 对于任意一条属于期望轨迹分布中的轨迹 计算该轨迹 随时间变化的风险Ri(t)=R0(Si(x(t) ,y(t)) ,t),进而得到整个期望轨迹分布中所有不同 期望轨迹分布对应的风险大小。 进一步地,步骤5中的“自动驾驶车辆的可接受风险水平”的确定方法包括如下步 骤: RA=fA(uC,uP,uT) 式中,uC是指自动驾驶车辆获取信息的延迟,uP是指自动驾驶车辆对周围环境感知 可能存在的误差,uT是指对其它运动车辆轨迹预测可能存在的误差。 进一步地,步骤6中的“可接受风险轨迹分布”的获得方法包括如下步骤: 当该轨迹Si(x(t) ,y(t))对应的随时间变化的风险Ri(t)小于车辆的风险可接受水 平RA,即Ri(t)≤RA时,则该条轨迹分布属于可接受风险轨迹分布Taccept(x,y,vx,vy,ax,ay,ψ, t),以此标准获得可接受风险轨迹分布Taccept。 进一步地,步骤7中的“运动轨迹规划”的获得方法包括如下步骤: 步骤71,计算所有属于可接受风险轨迹分布轨迹的综合收益: 其中 步骤72,获得自动驾驶车辆在该无信号交叉口内的运动轨迹规划: 对 有Gi≥Gj 式中,g(Si ,accept(x(t) ,y(t))为期望轨迹的一个拉格朗日函数。则可以得到轨迹 Si,accept(x(t) ,y(t)),其为自动驾驶车辆在该无信号交叉口内的运动轨迹规划。 附图说明 图1为根据本公开











