
技术摘要:
一种航天器自治协同粗精分层主被一体三超控制参数确定方法,适用于天文观测、高分辨率对地观测等具有载荷超高精度确定需求的领域。针对具有超高精度、超高稳定度、超敏捷控制的航天器三超控制提供了控制参数设计方法,基于指标分解的方法分别对航天器三超控制系统各控 全部
背景技术:
目前,航天器普遍采用飞轮、控制力矩陀螺等含有高速转子的部件作为姿态控制 系统的执行机构。这些高速转动部件不可避免地会产生高频抖动以及微振动,直接影响载 荷的工作性能。这无法满足天文观测、极高分辨率对地观测等这类具有光学载荷高性能控 制要求的航天任务需求。而航天器多级复合控制系统正是根据这类光学载荷高精度姿态控 制需求应运而生。航天器多级复合控制系统是指具有“超高精度指向”、“超高稳定度控制”、 “超敏捷控制”等三超控制性能的航天器平台。 在传统航天器控制系统中,星体和载荷刚性连接,星体中的抖动和微振动直接传 递到载荷,影响光学载荷高品质成像性能。而目前的姿态控制方法受限于姿态敏感器等测 量精度和测量带宽限制,无法实现对高频抖动的隔离抑制。目前的控制系统存在以下不足: 1、无法实现星体的高频微振动的隔离抑制 在目前航天器的姿态控制系统中,载荷和星体采用刚性连接。航天器星体中存在 的挠性振动和高频微振动直接传递到载荷,造成光学载荷无法进一步提高成像质量。而传 统的航天器姿态系统,受限于控制器带宽和执行机构的精度无法实现对挠性振动和高频微 振动的主动控制,进一步提高星体的控制精度和稳定度受到限制。 2、难以实现载荷光轴超高精度指向和超高稳定度控制 在目前的航天器控制系统仿真模型中只有星体一级模型,不包含主动指向超静平 台以及快速反射镜数学模型。受限于敏感器测量带宽、执行机构响应带宽等因素无法进一 步提高载荷的指向精度和稳定度。在包含主动指向超静平台以及快速反射镜的卫星控制系 统模型中,需要设计航天器多级复合指向控制方案,同时针对多级复合控制设计部件较多、 各通道传递关系复杂的问题,给出一种基于频域分析的指标分解和参数设计方法,实现对 多级复合控制的快速最优设计,实现航天器的三超控制性能。
技术实现要素:
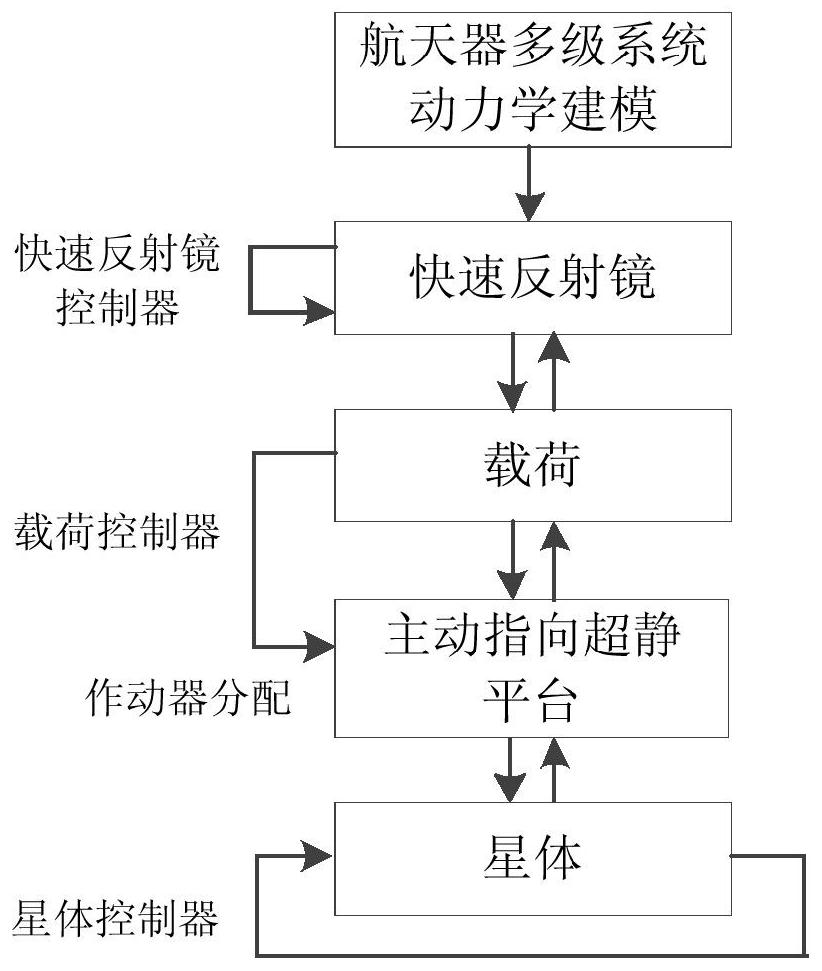
本发明解决的技术问题是:克服现有技术的不足,提出了一种航天器自治协同粗 精分层主被一体三超控制参数确定方法,基于指标分解的方法分别对航天器三超控制系统 各控制器参数进行设计,与传统的试凑方法设计参数相比提升了设计效率与控制性能,为 未来航天器光学载荷超高精度指向、超高稳定度控制、高品质成像提供技术基础。 本发明的技术解决方案是: 航天器自治协同粗精分层主被一体三超控制参数确定方法,包括如下步骤: (1)对航天器多级系统建立三级控制模型,包括星体控制回路的控制模型、载荷控 制回路的控制模型以及快速反射镜控制回路的控制模型; 5 CN 111605733 A 说 明 书 2/8 页 (2)根据三级控制模型和航天器多级系统所采用的敏感器类型,计算出CMG、星敏 感器、星体陀螺分别传递到星体姿态角的传递函数; (3)计算星体角速度、载荷控制器、载荷陀螺、星敏感器、载荷相对姿态测量分别传 递到载荷姿态角的传递函数; (4)将航天器的星体惯量和载荷惯量带入上述各传递函数得到航天器多级系统实 际模型,将各敏感器和执行机构真实特性参数作为上述各传递函数的输入,通过调整控制 参数和滤波系数,使得各项因素到载荷姿态角的传递函数的功率谱密度的平方和最小,即 可得到实际航天器特性下载荷姿态精度和稳定度最优的控制参数,从而实现航天器三超控 制。 进一步的,星体控制回路的控制模型为: 其中,Ib为星体转动惯量,Hvscmg为星体上的控制力矩陀螺角动量,ωb为星体角速 度,Tpb为主动指向超静平台对星体平台的反作用力矩,Tbd为星体受到的外界扰动力矩,Tb为 星体受到的控制力矩,其表达式为: 式中,Isat为航天器多级系统总惯量,ksatp、ksatd、ksati为控制器参数;Δθberr、Δ ωberr分别为星体姿态控制误差和角速度控制误差,ωbr为星体期望角速度;表示矢量r的 导数,r×表示矢量r的反对称矩阵,其中r可为任意矢量。 进一步的,快速反射镜控制回路的控制模型为: 其中,Jfx、Jfy分别为快速反射镜以及支撑结构转动部分x、y两轴的转动惯量,θfx、 θfy为快速反射镜x、y轴的姿态角,θpx、θpy分别为载荷的滚动角和俯仰角,kθ为快速反射镜支 撑结构扭转刚度,cθ为快速反射镜支撑结构以及作动器中直线电机的阻尼系数,mθ为作动器 中直线电机动子质量,lθ为直线电机力作动点与快速反射镜转轴的距离,Tdfx、Tdfy为快速反 射镜受到的外界扰动力矩,Tfx、Tfy分别为快速反射镜x、y两轴的控制力矩,其计算公式为: 式中,kfpx、kfpy、kfdx、kfdy、kfix、kfiy为控制器参数,θfxr、θfyr为快速反射镜x、y轴的期 望姿态角。 进一步的,载荷控制回路的控制模型为: 其中,Ip为载荷的惯量,ωp为载荷角速度,Tp为载荷主动控制力矩,Tdp为载荷受到 的扰动力矩,Tfp为载荷受到快速反射镜执行机构的主被动反作用力矩,计算公式分别为: 6 CN 111605733 A 说 明 书 3/8 页 Tfp=[Tfpx,Tfpy,0]T 式中,Ipc为载荷相对于整星质心的惯量在载荷坐标系的表达,kpp、kpd、kpi为载荷控 制器参数;Δθperr、Δωperr分别为载荷姿态控制误差和角速度控制误差,ωpr为载荷期望角 速度。 进一步的,CMG、星敏感器、星体陀螺分别传递到星体姿态角的传递函数分别为: 其中,ωcc、ωcp、ωcg分别为CMG噪声惯性特性系数、星敏感器滤波系数、星体陀螺 滤波系数;WNcmgθ、WNSPθ、WNSGθ分别为CMG、星敏感器、星体陀螺传递到星体姿态角的传递函 数,s是传递函数中复频域自变量。 进一步的,星体角速度、载荷控制器、载荷陀螺、星敏感器、载荷相对姿态测量传递 到载荷姿态角的传递函数分别为: 其中,ωcT、ωcR、ωcL分别为载荷控制器、载荷陀螺、载荷相对姿态测量的滤波系 数,k和c分别为载荷被动隔振环节的整体刚度系数和阻尼系数,krp为载荷补偿控制系数。 进一步的,航天器多级系统包括星体平台、主动指向超静平台、载荷、传感器系统 以及快速反射镜; 载荷为光学系统,用于对天体成像; 快速反射镜安装在载荷内部,用于调节载荷光轴指向; 7 CN 111605733 A 说 明 书 4/8 页 传感器系统用于测量数据; 星体平台用于支撑主动指向超静平台和载荷; 主动指向超静平台安装于载荷和星体平台之间,其上平面与载荷相连,下平面与 星体平台相连;主动指向超静平台由六个作动器构成,每个作动器均包括位移敏感器、弹 簧-阻尼结构以及直线电机; 位移敏感器用于测量直线电机的平动位移;弹簧-阻尼结构用于实现对星体平台 高频振动的隔离;直线电机用于提供主动力,实现对载荷的姿态控制。 进一步的,直线电机作为主动环节,弹簧-阻尼结构作为被动环节,快速反射镜通 过其支撑结构实现被动环节,弹簧-阻尼结构与直线电机并联安装;弹簧-阻尼结构包括并 联的弹簧和阻尼器。 进一步的,航天器多级系统的传感器系统包括星体陀螺、载荷星敏感器、载荷测微 敏感器、导星敏感器、主动指向超静平台位移测量传感器以及快速反射镜位移测量传感器; 星体陀螺测量星体的角速度;载荷星敏感器测量载荷惯性姿态;载荷测微敏感器 测量载荷角速度;导星敏感器测量快速反射镜惯性姿态;主动指向超静平台位移测量传感 器测量载荷与星体的相对姿态;快速反射镜位移测量传感器测量快速反射镜与载荷的相对 姿态。 进一步的,载荷测微敏感器采用测微光纤陀螺实现,精度比星体陀螺高一个数量 级。 本发明与现有技术相比的优点在于: 1、本发明实现星体平台微振动隔离抑制提高载荷稳定度指标。 目前的航天器姿态控制系统只有星体一级姿态控制。载荷和星体刚性连接,星体 平台的中高频微振动直接传递在载荷,严重降低了载荷的稳定度指标。本发明设计的航天 器多级复合控制系统通过主动指向超静平台的被动环节实现星体平台中高频扰动(>10Hz) 的20dB的衰减。通过主动指向超静平台主动控制,进一步实现星体平台中低频扰动(<10Hz) 10dB的衰减。通过快速反射镜被动环节,能实现星体平台低频微振动(<0.1Hz)和载荷中低 扰动20dB的衰减。通过两级被动环节实现星体平台微振动隔离抑制,提高载荷稳定度。 2、本发明能够实现多级复合控制系统的参数快速最优设计。航天器多级复合控制 系统具有控制结构复杂、存在多种扰动源、涉及部件多的特点,其传递特性远比传统的单级 控制系统复杂。本发明设计的基于指标分解的系统指标分析与参数设计方法,根据多级复 合控制系统的模型推导了各项扰动因素对控制指标的传递函数,通过频域分析的方法实现 了各级控制器与滤波器的参数综合优化快速设计,相比传统的试凑法设计参数大幅提升了 设计效率与控制性能,实现了航天器三超性能控制。 附图说明 图1为航天器多级复合控制系统结构图; 图2为航天器星体姿态精度各项噪声影响分析示意图; 图3为航天器星体稳定度各项噪声影响分析示意图; 图4为航天器载荷姿态精度各项噪声影响分析示意图; 图5为航天器载荷稳定度各项噪声影响示意图。 8 CN 111605733 A 说 明 书 5/8 页











