
技术摘要:
本申请公开一种深度图像获取方法及活体识别方法、设备、电路和介质。所述深度图像获取方法包括:开启红外光源,以提供双目红外相机拍摄所需的光照,其中所述双目红外相机包括第一红外相机和第二红外相机;获取所述双目红外相机在所述光照下拍摄的红外目标图像,所述红 全部
背景技术:
随着人工智能地不断发展,人脸识别作为一种生物识别技术,广泛地应用在安防、 支付等领域。在人脸识别技术中,为了防止被人脸照片攻破,需要利用人脸的深度图像进行 活体识别。根据相关公开,可以利用结构光技术和飞行时间(Time of flight,简称“TOF”) 技术来获取人脸的深度图像。 结构光技术的基本原理是:通过近红外激光器,将具有一定结构特征(例如散斑图 案)的光线投射到被拍摄物体上,再由专门的红外摄像头进行采集。这种具备一定结构的光 线,会因被摄物体的不同深度区域反射,而采集不同的图像相位信息。然后通过运算单元将 这种结构的变化换算成深度信息,以此来获得三维图像。再将获取到的信息进行更深入的 应用。 TOF技术的基本原理是:激光源发射一定视野角激光,碰到物体以后会反射回来。 收光器件为带电荷保持的光敏二极管阵列(CCD)。通过捕捉激光来回的时间,能快速准确计 算出到距离信息(即深度信息),以此来获得三维结构。 上述两种技术都是通过光学手段来获取被拍摄物体的深度图像,对光学仪器要求 较高。 在此部分中描述的方法不一定是之前已经设想到或采用的方法。除非另有指明, 否则不应假定此部分中描述的任何方法仅因其包括在此部分中就被认为是现有技术。类似 地,除非另有指明,否则此部分中提及的问题不应认为在任何现有技术中已被公认。
技术实现要素:
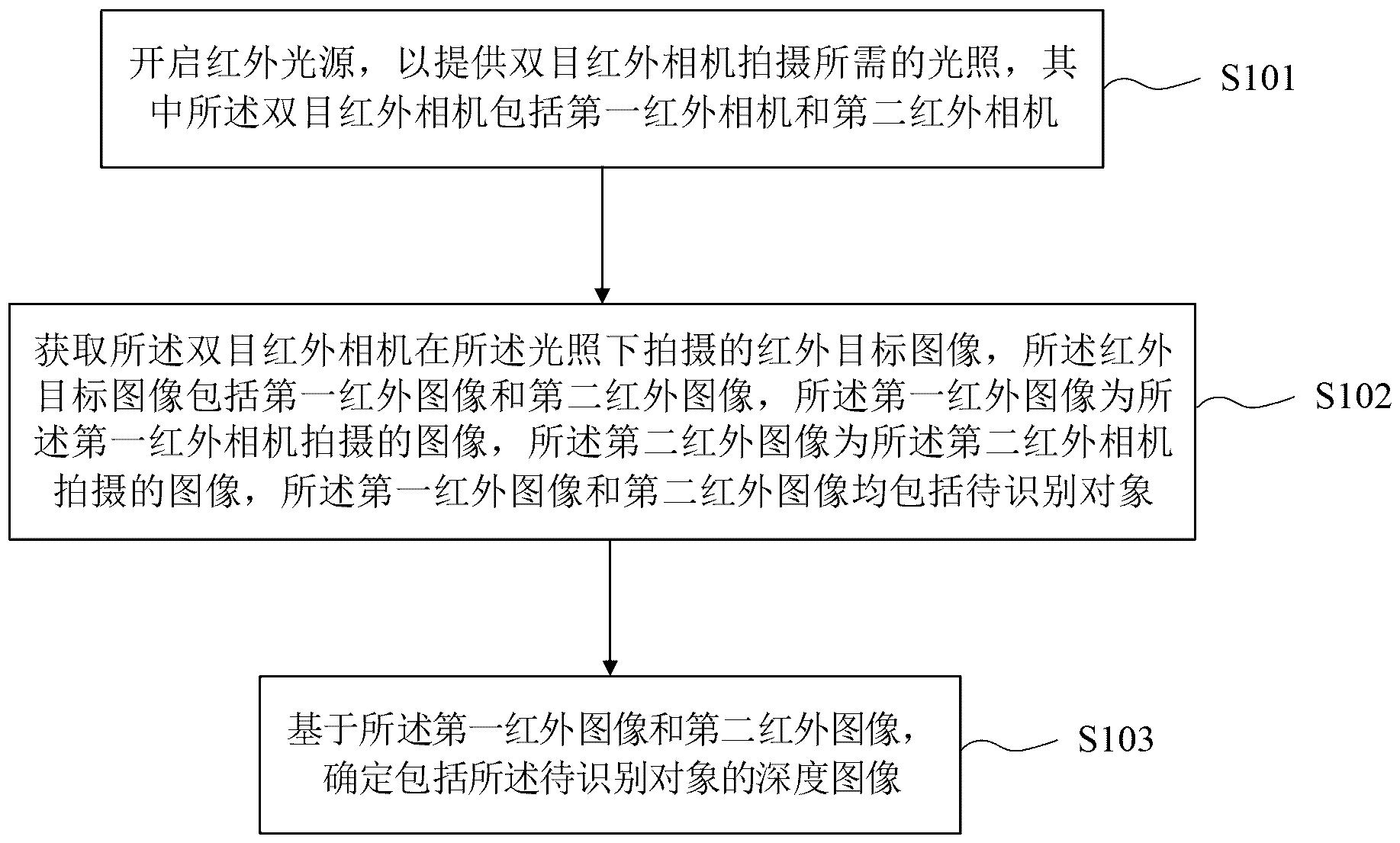
根据本公开的一方面,提供一种深度图像获取方法,包括:开启红外光源,以提供 双目红外相机拍摄所需的光照,其中所述双目红外相机包括第一红外相机和第二红外相 机;获取所述双目红外相机在所述光照下拍摄的红外目标图像,所述红外目标图像包括第 一红外图像和第二红外图像,所述第一红外图像为所述第一红外相机拍摄的图像,所述第 二红外图像为所述第二红外相机拍摄的图像,所述第一红外图像和第二红外图像均包括待 识别对象;以及基于所述第一红外图像和第二红外图像,确定包括所述待识别对象的深度 图像;其中,基于所述第一红外图像和第二红外图像,确定包括所述待识别对象的深度图像 包括:获取包围所述第一红外图像中的所述待识别对象的第一边界框,以及包围所述第二 红外图像中的所述待识别对象的第二边界框;以及基于所述第一红外图像、第二红外图像、 所述第一边界框和第二边界框,确定包括所述待识别对象的深度图像。 根据本公开的另一方面,提供一种活体识别方法,包括:执行上述的深度图像获取 方法;以及至少部分地基于所述深度图像,确定第三识别结果,所述第三识别结果指示所述 7 CN 111598065 A 说 明 书 2/16 页 待识别对象是否为活体。 根据本公开的另一方面,提供一种电子电路,包括被配置为执行上述的深度图像 获取方法的步骤的电路。 根据本公开的另一方面,提供一种深度图像获取设备,包括:红外光源,被配置为 提供双目红外相机拍摄所需的光照;双目红外相机,包括第一红外相机和第二红外相机,被 配置为拍摄红外目标图像,所述红外目标图像包括第一红外图像和第二红外图像,所述第 一红外图像为所述第一红外相机拍摄的图像,所述第二红外图像为所述第二红外相机拍摄 的图像,所述第一红外图像和第二红外图像均包括待识别对象;以及上述的电子电路。 根据本公开的另一方面,提供一种电子电路,包括:被配置为执行上述的活体识别 方法的步骤的电路。 根据本公开的另一方面,提供一种活体识别设备,包括:红外光源,被配置为提供 双目红外相机拍摄所需的光照;双目红外相机,包括第一红外相机和第二红外相机,被配置 为拍摄红外目标图像,所述红外目标图像包括第一红外图像和第二红外图像,所述第一红 外图像为所述第一红外相机拍摄的图像,所述第二红外图像为所述第二红外相机拍摄的图 像,所述第一红外图像和第二红外图像均包括待识别对象;以及上述的电子电路。 根据本公开的另一方面,提供一种电子设备,包括:处理器;以及存储程序的存储 器,所述程序包括指令,所述指令在由所述处理器执行时使所述处理器执行上述的深度图 像获取方法或上述的活体识别方法。 根据本公开的另一方面,提供一种存储程序的非暂态计算机可读存储介质,所述 程序包括指令,所述指令在由电子设备的处理器执行时,致使所述电子设备执行上述的深 度图像获取方法或上述的活体识别方法。 附图说明 附图示例性地示出了实施例并且构成说明书的一部分,与说明书的文字描述一起 用于讲解实施例的示例性实施方式。所示出的实施例仅出于例示的目的,并不限制权利要 求的范围。在所有附图中,相同的附图标记指代类似但不一定相同的要素。 图1是示出根据本公开示例性实施例的深度图像获取方法的流程图; 图2是示出根据示例性实施例的双目视觉的原理示意图; 图3和图4是示出根据本公开示例性实施例的深度图像获取方法的流程图; 图5是示出根据本公开示例性实施例的单步多框检测神经网络模型的检测原理示意 图; 图6是示出根据本公开示例性实施例的深度图像获取方法的流程图; 图7-图9是示出根据本公开示例性实施例的活体识别方法的流程图; 图10-图14是示出根据示例性实施例的比对方法的流程图; 图15是示出能够应用于示例性实施例的示例性计算设备的结构框图。











