
技术摘要:
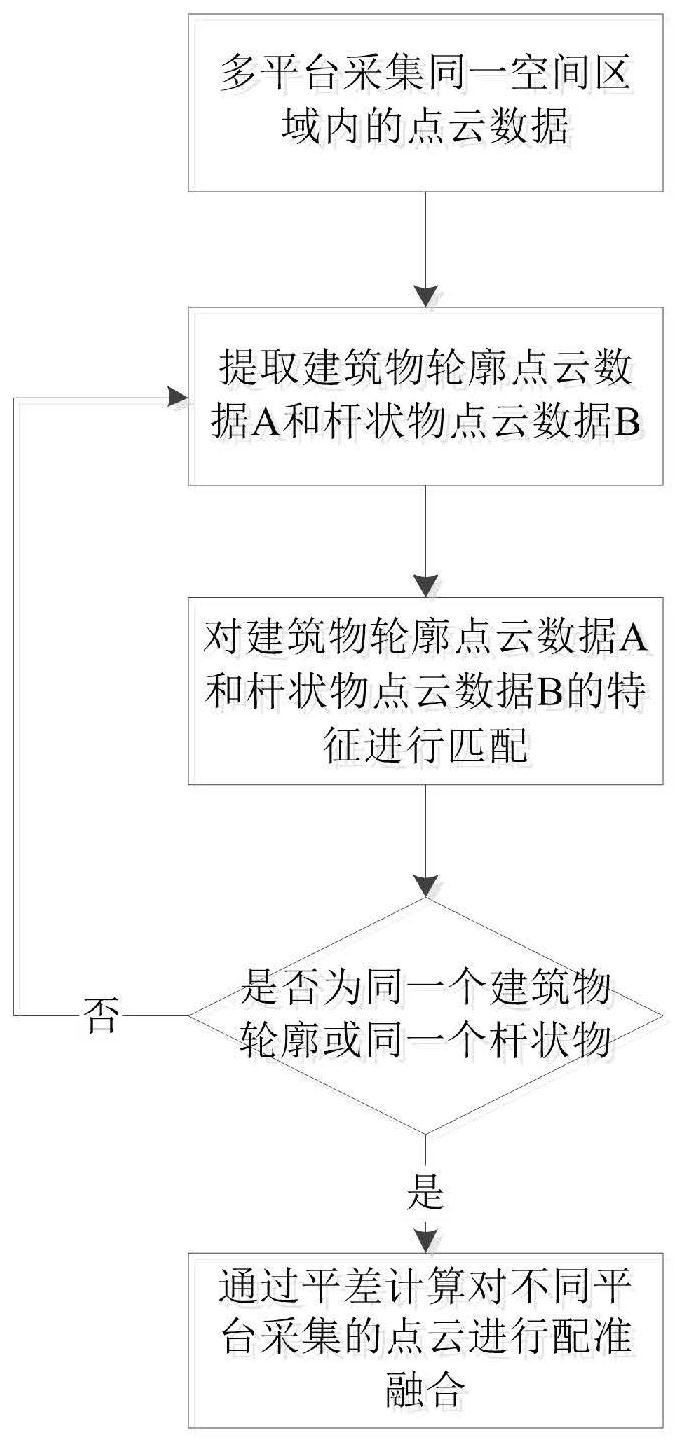
本发明涉及一种多源移动测量点云数据空地一体化融合方法、存储介质及终端,所述融合方法包括:通过聚类判断的方式从不同平台采集的点云数据中提取出建筑物轮廓点云数据A,以及通过三维格网化的二维分析从不同平台采集的点云数据中提取出杆状物点云数据B;对从不同平台 全部
背景技术:
激光雷达是一种快速获取物体表面三维点云数据的技术,已成为高时空分辨率三 维对地观测的一种主要技术手段,在基础测绘、智慧城市、资源调查、高精度地图等领域发 挥越来越重要的作用。从数据获取平台而言,包括卫星平台、机载平台、车载平台、地面/背 负式平台等等。 目前通过激光雷达获取三维点云数据的技术大多使用的是单一平台进行点云数 据获取,由于单一视角、单一平台的观测范围有限且空间基准不一致,为了获取目标区域全 方位的空间信息,不仅需要进行站间/条带间的点云数据融合,还需要进行多平台(如机载、 车载、地面等)的点云数据融合,以弥补单一视角、单一平台带来的数据缺失,实现大范围场 景完整、精细的数字现实描述;不同平台点云数据的融合需要同名特征进行关联,目前已有 的方法常用特征为法向量、关键点、点特征直方图等低阶特征,但是由于不同平台扫描视角 不同、覆盖范围不同、扫描得到的点云数据点密度存在巨大差异,所提取的低阶特征受点分 布、点密度影响大,算法精度不高、鲁棒性差。 申请号为CN201410047608.X的中国专利公布了“一种多平台点云数据融合方法” 的发明专利,要点是对滤波去噪后的点云数据进行精度分析,以精度最高的点云数据为依 据,对其余数据进行精度纠正,
技术实现要素:
是将预处理后的点云数据进行精度对比,并以 精度较高的点云数据为依据,对精度较低的数据进行纠正分析,获取点云数据转换模型,并 进行纠正融合,其具体处理步骤为:1)根据点云数据的采集日期通过构建数字表面模型确 定相同区域点云数据的变化情况;2)根据检测后点云数据变化范围提取纠正点,生成更新 模型;3)根据更新模型对精度较差的点云数据进行更新;4)通过构建数字表面模型检查数 据融合精度);该技术方案主要是基于不同采用时间的点云数据变化情况进行数据模模型 的更新,再根据更新的模型对精度差的点云数据进行更新,虽然能够对精度差的点云数据 进行更新,但是也会导致整体模型一定程度的失真,而且其与本发明基于多种对象级别的 特别融合的方法存在本质区别。 申请号为CN201910266150.X的中国专利公布了“面向全息测绘的多平台点云智能 处理方法”的发明专利申请,要点是多平台激光点云数据高精度融合,其具体为:进行近邻 点云查找,全局匹配能量方程构建和二分图的最小代价匹配方式,但是其整体方法比较复 杂,计算量大,而且其与本发明基于多种对象级别的特别融合的方法也存在本质区别。因 此,如何解决目前根据不同平台获取的三维点云数据进行融合配准存在的缺陷,是现阶段 需要解决的问题。 4 CN 111598823 A 说 明 书 2/7 页











