
技术摘要:
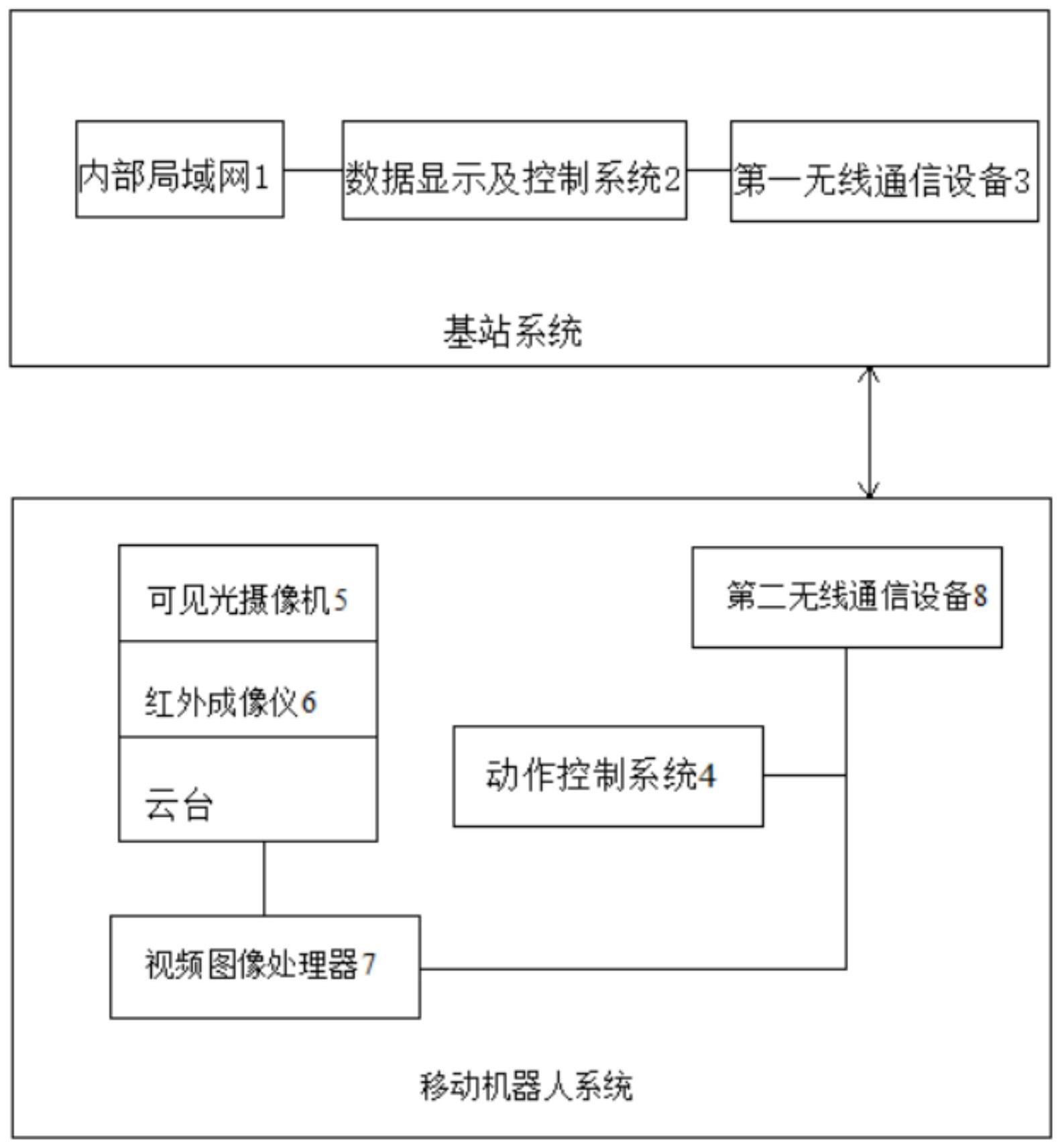
本发明涉及一种变电站巡视机器人系统,包括基站系统和移动机器人系统,所述基站系统包括内部局域网、第一无线通信设备以及分别与所述内部局域网和第一无线通信设备相连的数据显示及控制系统,所述移动机器人系统包括动作控制系统、安装在云台上的可见光摄像机和红外成 全部
背景技术:
变电站现有巡检方式主要为人工巡视,人工巡检存在劳动强度大、工作效率低、检 测质量分散、管理成本高等明显不足。随着机器人技术的快速发展,将机器人技术与电力应 用相结合,基于室外机器人移动平台,携带检测设备代替人工进行设备巡检成为可能。变电 站的传统巡检主要通过人员去现场来进行巡视,通过人员的主观感官,如看、触、听、嗅等来 对设备运行情况进行定性判断。对于设备,通过看来检查渗漏现象,检查设备的参数,检查 夜间的设备污闪情况,检查设备绝缘,要对其外壳进行触摸,检测其温度的变化和振动情 况,结合以往的工作经验来对设备的运行情况进行有效判断。通过判断设备的振动、放电声 音等来对设备的故障进行前兆判断,这主要是通过工人的听来得以实现。
技术实现要素:
为解决上述技术问题,本发明提供一种变电站巡视机器人系统。 本发明采用的技术方案是:提供一种变电站巡视机器人系统,包括基站系统和移 动机器人系统,所述基站系统包括内部局域网、第一无线通信设备以及分别与所述内部局 域网和第一无线通信设备相连的数据显示及控制系统,所述移动机器人系统包括动作控制 系统、安装在云台上的可见光摄像机和红外成像仪、与可见光摄像机和红外成像仪相连的 视频图像处理器以及分别与所述视频图像处理器和动作控制系统相连的第二无线通信设 备,所述第一无线通信设备和第二无线通信设备之间通过无线网络通道相连接;所述动作 控制系统包括用于控制机器人移动的移动控制装置、用于定位的定位装置和用于控制云台 动作的云台控制装置;所述云台控制装置包括用于安装可见光摄像机和红外成像仪的方位 调节架、用于控制所述方位调节架俯仰转动的俯仰转动电机、用于控制所述方位调节架水 平转动的水平转动电机。 在本发明所述的变电站巡视机器人系统中,所述移动机器人系统还包括用于对变 电站设备的运行噪音进行录取的声音采集设备。 在本发明所述的变电站巡视机器人系统中,所述移动机器人系统还包括用于检测 变电站高压设备电弧放电、闪络以及电晕现象的紫外检测设备。 在本发明所述的变电站巡视机器人系统中,所述紫外检测设备包括包括紫外检测 管、紫外检测管驱动板、STM32开发板和触摸屏,所述紫外检测管检测接收放电发出的紫外 光后将信号送出,信号经过紫外检测管驱动板信号处理后形成标准的方波,方波送入STM32 开发板的AD端,STM32开发板对模数转换后数据处理,通过STM32开发板串口1通讯发送到触 摸屏上。 在本发明所述的变电站巡视机器人系统中,所述STM32开发板串口2通过所述第二 无线通信设备与基站系统相连。 3 CN 111596176 A 说 明 书 2/3 页 在本发明所述的变电站巡视机器人系统中,所述红外成像仪包括调理板、与调理 板连接的处理板、与处理板连接的压缩板以及分别与压缩板和控制板连接的接口板。 在本发明所述的变电站巡视机器人系统中,所述调理板包括信号调理模块,所述 压缩板包括Hi3516芯片模块;所述处理板包括FPGA芯片模块。 实施本发明提供的变电站巡视机器人系统为智能巡检与传统巡检结合,智能巡检 机器人可以不受时间限制、执行作业准确到位等优势,优化人与智能巡检设备的工作范围, 借助于智能巡检设备取代人开展特殊类型的作业,并实现远程控制、自动巡视等工作。 附图说明 下面将结合附图及实施例对本发明作进一步说明,附图中: 图1是本发明实施例的框线结构示意图。











