
技术摘要:
本发明属于位移传感器技术领域,具体涉及一种基于四象限光栅的三维微位移传感器结构,所述第一激光器、第二激光器、第三激光器的正下方分别设置有第一准直透镜、第二准直透镜、第三准直透镜,所述第一准直透镜、第二准直透镜、第三准直透镜的下方设置有上层光栅,所述 全部
背景技术:
当前纳米测量对于位移传感器的要求趋势是:高精度、高分辨力、大量程、体积小、 重量轻、抗干扰、低成本、对工作环境要求低、安装和使用简单、方便。在众多测量方法中,光 学测量具有直接与光波长相关、测量精度高、分辨力高的优点。而传统的激光干涉仪采用波 长为测量基准,可以达到很高的测量精度,但是对激光器稳频要求高,成本高;并且对使用 环境要求苛刻,对温度、湿度及气压变化要连续补偿,还要抑制光路中的空气扰动及仪器的 机械振动,容易受到环境干扰,并且系统体积较大,操作繁琐,通常只在实验室使用,不能应 用于工业现场。采用光栅作为测量基准,具有测量基准固定,不受环境影响的优点;同时对 光源稳频要求不高,因而成本大幅降低;同时由于电子技术的应用,能够产生数字位移信 号,便于应用于自动控制系统中。因此,采用光栅作为测量基准的光栅尺在现代工业中得到 广泛应用,但是传统光栅尺采用几何莫尔条纹原理进行测量,受测量原理的限制,当光栅密 度增大,刻线周期减小时,由于衍射现象变得显著,莫尔条纹信号的质量因高次谐波的影响 而降低,同时要求光栅副的间隙很小,仅为几十微米,使得仪器的安装十分困难,可靠性变 低,精度无法提高,因此采用传统几何莫尔条纹技术进行位移测量无法满足高精度纳米测 量要求。
技术实现要素:
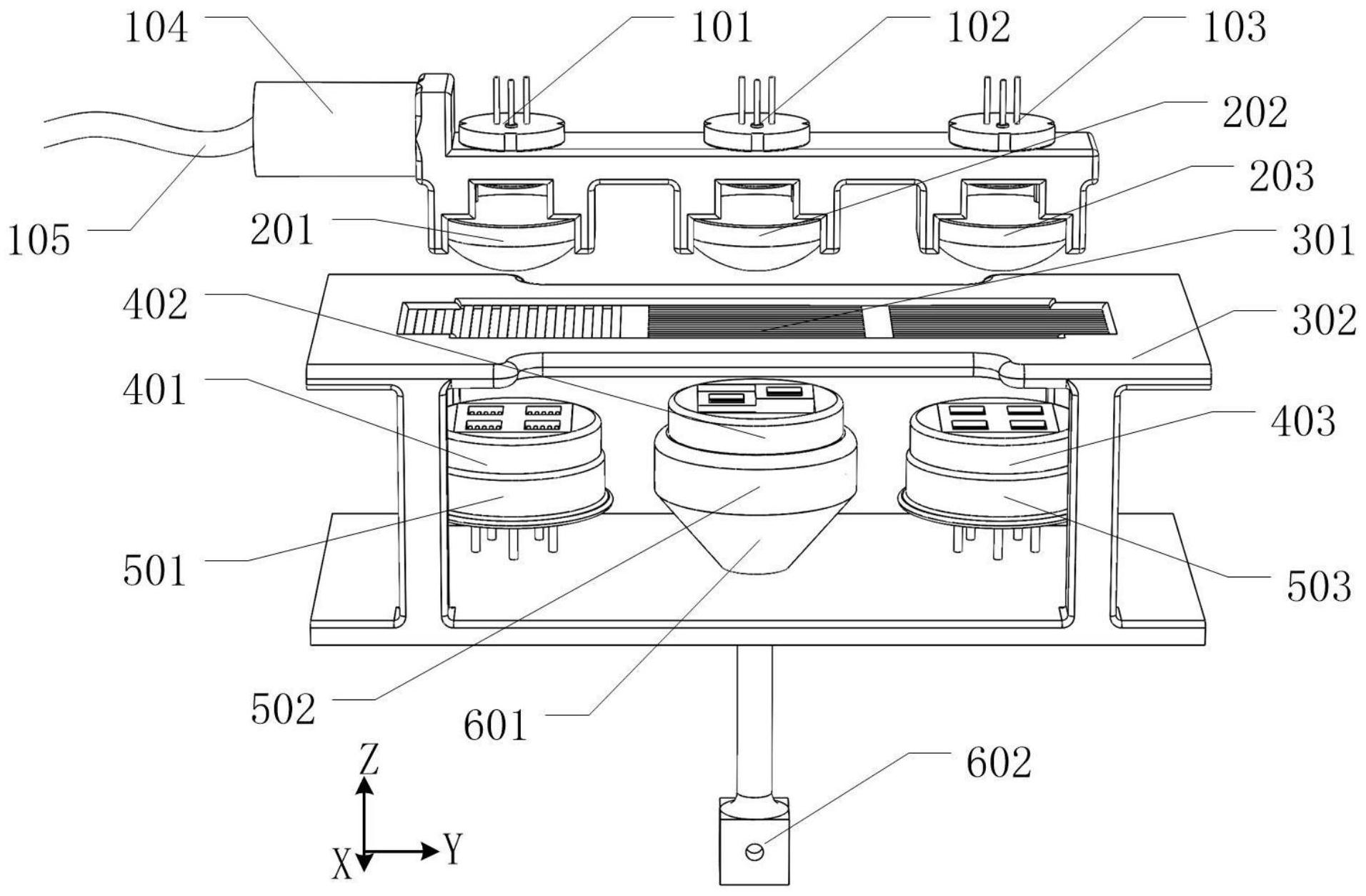
针对上述位移传感器抗干扰能力差、成本高、精度低的技术问题,本发明提供了一 种精度高、成本低、抗干扰能力强的基于四象限光栅的三维微位移传感器结构。 为了解决上述技术问题,本发明采用的技术方案为: 一种基于四象限光栅的三维微位移传感器结构,包括第一激光器、第二激光器、第 三激光器、第一准直透镜、第二准直透镜、第三准直透镜、上层光栅、第一下层固定光栅、下 层台阶四象限光栅、第二下层固定光栅、第一四象限探测器、第二四象限探测器、第三四象 限探测器,所述第一激光器、第二激光器、第三激光器的正下方分别设置有第一准直透镜、 第二准直透镜、第三准直透镜,所述第一准直透镜、第二准直透镜、第三准直透镜的下方设 置有上层光栅,所述上层光栅的下方设置有第一下层固定光栅、下层台阶四象限光栅、第二 下层固定光栅,所述第一下层固定光栅的底部连接有第一四象限探测器,所述下层台阶四 象限光栅的底部连接有第二四象限探测器,所述第二下层固定光栅的底部连接有第三四象 限探测器,所述第二四象限探测器的底部固定连接有套筒,所述套筒固定连接有位移输入 端口,所述第一激光器、第二激光器、第三激光器发出光束经过第一准直透镜、第二准直透 镜、第三准直透镜准直,再经过上层光栅形成泰伯像,第一下层固定光栅、第二下层固定光 栅在泰伯像位置发生相对运动时,第一四象限探测器、第三四象限探测器中各象限接收到 4 CN 111595243 A 说 明 书 2/5 页 的光强会发生变化;下层台阶四象限光栅发生离面相对运动时,固定在套筒里的第二四象 限探测器中各象限接收到的光强会发生变化,得到位移与光强变化的关系,从而通过光强 变化来获得被测位移的大小。 所述上层光栅采用单片集成正交光栅,所述上层光栅包括第一上层光栅、第二上 层光栅、第三上层光栅,所述第一上层光栅与第三上层光栅的栅线方向相互垂直,所述第三 上层光栅与第二上层光栅的栅线方向一致,所述第一上层光栅、第二上层光栅、第三上层光 栅并列集成在玻璃片上,所述玻璃片固定在限位框架内。 所述第一下层固定光栅、第二下层固定光栅均采用平面四象限光栅,所述第一下 层固定光栅、第二下层固定光栅相邻象限光栅的栅线均相差nd d/4。 所述下层台阶四象限光栅包括第一象限光栅、第二象限光栅、第三象限光栅、第四 象限光栅,所述第一象限光栅、第二象限光栅、第三象限光栅、第四象限光栅的高度依次降 低t/4,所述t为两个相邻泰伯像的间距,所述t=d2/λ,d为光栅周期,所述λ为激光器波长。 所述第一下层固定光栅、下层台阶四象限光栅、第二下层固定光栅分别与第一四 象限探测器、第二四象限探测器、第三四象限探测器的光敏面通过胶固定贴合。 还包括支撑结构、供电线,所述第一激光器、第二激光器、第三激光器、第一准直透 镜、第二准直透镜、第三准直透镜均固定在支撑结构内,所述供电线分别与第一激光器、第 二激光器、第三激光器连接。 所述第一激光器、第二激光器、第三激光器的波长均为635nm。 所述上层光栅、第一下层固定光栅、下层台阶四象限光栅、第二下层固定光栅的周 期均为800nm。 本发明与现有技术相比,具有的有益效果是: 本发明使用双层光栅结构,增大了微位移测量的量程;并且本发明通过四象限光 栅及探测器产生四路信号进行差分,有利于后续高倍细分,且可消除背景噪声及直流分量, 提高微位移检测的分辨率和精度。并且本发明通过一个位移输入端实现三维微位移的分立 测量,降低了噪声干扰。 附图说明 图1为本发明的整体结构示意图; 图2为本发明上层光栅的结构示意图; 图3为本发明下层台阶四象限光栅的结构示意图; 图4为本发明探测器各象限接收光强及差分信号与位移关系图; 其中:101为第一激光器,102为第二激光器,103为第三激光器,104为支撑结构, 105为供电线,201为第一准直透镜,202为第二准直透镜,203为第三准直透镜,301为上层光 栅,302为限位框架,303为第一上层光栅,304为第二上层光栅,305为第三上层光栅,401为 第一下层固定光栅,402为下层台阶四象限光栅,403为第二下层固定光栅,4021为第一象限 光栅,4022为第二象限光栅,4023为第三象限光栅,4024为第四象限光栅,501为第一四象限 探测器,502为第二四象限探测器,503为第三四象限探测器,601为套筒,602为位移输入端 口。 5 CN 111595243 A 说 明 书 3/5 页











