
技术摘要:
本发明涉及风洞实验技术领域,公开了一种前后并联的三关节双支撑攻角机构及其控制方法,包括安装于进气道模型底部的前支撑和后支撑,前支撑一端固定于进气道模型底部前端,另一端通过活动关节一铰接有固定杆,固定杆固定在风洞底部壁板上;后支撑一端固定于进气道模型 全部
背景技术:
常规超声速、高超声速闭式风洞设计之初大多以外流试验为主,如开展模型的气 动力、气动力矩、气动热的测试等,整个试验模型都需要放在风洞试验段均匀区内,模型尺 寸相对较小,堵塞比常在试验段面积的5%以内,模型通过尾支连接架设在风洞的攻角机构 上。由于模型尺寸较小,风洞的攻角机构承受的气动载荷较小。 在这些风洞中开展进气道内流试验时,模型的尺度可以接近于风洞的极限阻塞 比,如在0.6米×0.6米亚跨超风洞中,在来流马赫数4时可取到试验段面积的16%。此时决 定模型大小的因素不再是整个模型的长度,而是同时满足以下两个因素:1模型内流的捕获 口应在风洞的均匀区内,2模型形成的堵塞比小于风洞的极限堵塞比。 为了开展内流测量、流动显示、内流拍摄以及内流的流动控制并减少内流壁面效 应对内流的影响,需要将内通道尽量做大尺度越小,则雷诺数越小,边界层占比越大,壁面 效应越明显,从而导致内流试验模型尺度远大于外流试验模型。 按照空气动力学欧拉相似准则可知,模型受到的气动力与模型的特征尺寸的平方 成正比或者说与特征面积成正比)。当进气道模型尺度较大时,其所受气动力就比外流试验 模型大很多,这种情况下再使用风洞原有的攻角机构做支撑,原攻角机构将无法承载内流 模型的气动载荷。此时必须额外加工承载能力较大的、与大尺度进气道模型相适应的攻角 机构。 国内外在闭式风洞中开展内流试验有两种模型支撑方式:一种是上下并联双支撑 形式,模型的气动载荷由上下支撑共同承担,从而大大减轻了攻角机构的载荷;另一种是 “张线法”支撑形式,通过在模型上布置若干张线并牵引到风洞洞壁来支撑模型。 上下并联双支撑方式需要上下联动的双攻角机构来实现内流试验模型变攻角,成 本高且控制复杂;张线结构可以形成支撑并代替攻角机构,然而想改变内流试验模型攻角 则需要各个张线多自由度的联动伸缩,控制尤为复杂。因此如何设计这种既能支撑模型,又 能实现模型变攻角的机构是一个很现实的问题。
技术实现要素:
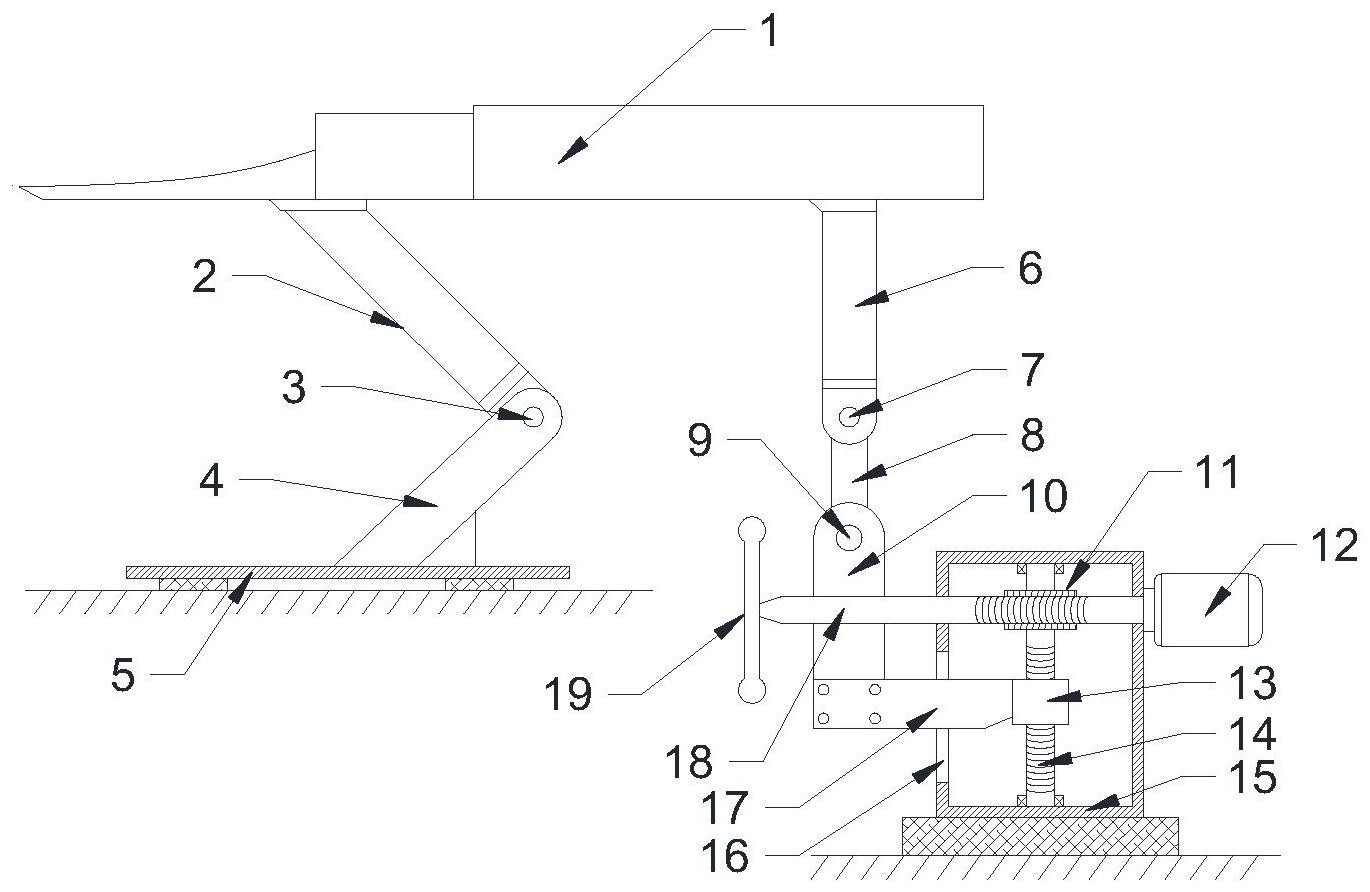
基于以上问题,本发明提供一种前后并联的三关节双支撑攻角机构及其控制方 法,利用驱动机构推动推拉杆上下移动,带动进气道模型以活动关节一为转动中心变换攻 角,既能支撑进气道模型,又能实现进气道模型变攻角功能,完全取代或部分取代风洞现有 的攻角机构;操作控制简单、成本低,还避免了内流试验模型气动载荷过大容易损伤传统外 流试验用攻角机构的问题。 为解决以上技术问题,本发明提供了一种前后并联的三关节双支撑攻角机构,包 3 CN 111579198 A 说 明 书 2/5 页 括安装于进气道模型底部的前支撑和后支撑,前支撑一端通过标准件固定于进气道模型底 部前端,另一端通过活动关节一铰接有固定杆,固定杆上远离前支撑的端头固定在风洞底 部壁板上;后支撑一端通过标准件固定于进气道模型顶部的后端,另一端通过活动关节二 铰接有连杆,连杆上远离后支撑的端头通过活动关节三铰接有推拉杆,推拉杆上远离连杆 的端头设置有可控制推拉杆在竖直方向上下运动的驱动机构,前支撑、后支撑、固定杆、连 杆以及推拉杆的中心轴均位于同一竖直平面内。 进一步地,驱动机构包括壳体,壳体内腔中安装有丝杠,丝杠的两个端头分别通过 轴承固定于壳体内壁;丝杠的螺纹段旋有丝杠螺母,丝杠螺母外壁固定有固定块,壳体上开 设有可供固定块上下移动的导向槽,固定块由导向槽伸出壳体外并与驱动连接;丝杠螺纹 段上方安装有蜗轮,壳体上固定有步进电机,步进电机的转轴上通过联轴器连接有与蜗轮 相匹配的蜗杆。 进一步地,蜗杆上远离步进电机的端头穿出壳体外壁并连接有旋转把手。 为解决上述技术问题,本发明还提供了一种前后并联的三关节双支撑攻角机构的 控制方法,包括如下步骤: S1、调整推拉杆的初始位置,使进气道模型的起始攻角为零,并设此时推拉杆的上 下调节距离H=0; S2、设A是活动关节一的中心,B是活动关节三的中心,C是活动关节二的中心,L1是 活动关节一与活动关节二之间的中心间距,L2是连杆的长度;推拉杆的上下调节量H与模型 攻角α具有一一对应的函数关系,设定进气道模型绕活动关节一逆时针旋转时,α>0;顺时针 旋转时,α<0;对于某一个需要调整的α,推拉杆的上下调节量H是唯一的,即: 由于L1、L2是已知的,需要进行一个具体的攻角α试验时,根据公式可以计算出推拉 杆的上下调节量H;α>0时,推拉杆向上调节相应的调节量H,α<0时,推拉杆向下调节相应的 调节量H。 与现有技术相比,本发明的有益效果是:本发明利用驱动机构推动推拉杆上下移 动,带动进气道模型以活动关节一为转动中心变换攻角,既能支撑进气道模型,又能实现进 气道模型变攻角功能,完全取代或部分取代风洞现有的攻角机构;操作控制简单、成本低, 还避免了内流试验模型气动载荷过大容易损伤传统外流试验用攻角机构的问题。 附图说明 图1为实施例1和2中前后并联的三关节双支撑攻角机构的结构示意图; 图2为实施例1和2中α>0时前后并联的三关节双支撑攻角机构结构示意图; 图3为实施例1和2中α>0时推拉杆的上下调节距离与攻角的关系示意图; 图4为实施例1和2中α<0时前后并联的三关节双支撑攻角机构结构示意图; 图5为实施例1和2中α<0时推拉杆的上下调节距离与攻角的关系示意图; 4 CN 111579198 A 说 明 书 3/5 页 图6为实施例1中丝杠、丝杠螺母及推拉杆的连接示意图 其中,1、进气道模型;2、前支撑;3、活动关节一;4、固定杆;5、风洞底部壁板;6、后 支撑;7、活动关节二;8、连杆;9、活动关节三;10、推拉杆;11、蜗轮;12、步进电机;13、丝杠螺 母;14、丝杠;15、壳体;16、导向槽;17、固定块;18、蜗杆;19、旋转把手。











