
技术摘要:
本发明公开了一种基于多级领导者鸽群理论的车队路口避障控制方法,包括步骤1,建立车队领导者数目切换原则;步骤2,定义风险感知区与危险感应区范围;步骤3,确定交通流车辆的集合划分;步骤4,计算车队中智能车i的风险系数μi;步骤5,由风险系数μi确定二级领导者; 全部
背景技术:
为满足安全、高效、智能化交通发展的要求,智能网联汽车多车协同避障策略成为 近年来发展和研究的热点方向。交叉路口作为城市交通环境的典型场景,由于人车混杂且 交通主体之间的交互和影响十分复杂,极易发生交通事故,是城市交通的“咽喉”所在。车队 在交叉路口弯道避障的不确定性和风险性,均高于直线路段的行驶环境。针对此,国内外研 究者开展了大量理论和实验探讨,研究重点已逐渐从单一的车载系统向路口人车路一体化 协同方向发展,近年来,车车协同、车路协同、智能化车辆安全技术和安全辅助驾驶技术等 成为多学科交叉的研究热点。 与此同时,随着仿生学的应用日益普及,鸽群的迁徙为解决交叉路口等问题提供 了一种崭新的思路。鸽群在迁徙过程中飞行决策采用平等交互模式或层级交互模式,两种 模式等同于车队中的无领导编队与领导车辆-从属车辆两种编队模式。平等交互模式下,车 辆之间的行驶决策相互影响;层级交互模式下,车队存在领导者,会对其车队内其他跟随车 辆的跟驰行为产生决定性影响。鸽群在迁徙的过程中,两种模式切换与鸽群轨迹曲率呈现 一定的关联,当鸽群飞行状态平稳时为平等交互模式,运动曲率发生较大变化时,原鸽群个 体转而采用层级交互模式,层级交互模式相比于平等交互模式,具有信息传递更快、效率更 高的特点。 因此,本发明针对复杂交叉路口环境下,结合鸽群平等交互模式和层级交互模式, 提出一种面向动态威胁车的车队协同应急避障方案。该方案基于两种鸽群迁徙模式及对应 的模式切换原则,将该理论引入到多车协同的路口控制方法中,从而达到车队过弯时动态 应急避障并保障车队安全顺利通过路口。 车队在路口进行转弯运动时,运动曲率较之前直线行驶发生较大变化,对应鸽群 理论,即此刻进行模式切换,车队由转弯前的平等交互模式转为头车作为领导者的领航-跟 随模式,在在领导者的层级交互模式下能够降低车辆之间的通讯延迟,更快的通过路口。但 处在路口复杂交通场景下存在各种突发状况,当领航-跟随模式下领导者带领车队转弯时, 出现旁侧车道的转弯车辆贴近我方车队或路口行人在行驶通过路口时逐渐逼近我方车队 的情况,车队将存在较大安全隐患并应根据此刻危险系数的大小采取不同程度的避让行 为,此刻,若车队中被贴近的车辆或被行人逼近的车辆不是作为头车的领导车时,贴近的车 辆以及逼近的行人无法对领导者产生威胁,原有的一级领导者也因此无法产生避让措施。 若此时贴近车辆或行人进一步逼近车队中从属车时,从属车辆将进行紧急避让并发生较大 的航向角偏转,当偏转角度超过阈值将导致在队形之中丢失前车目标,导致在整个车队形 位置丢失、破坏整个队形并对后方从属车辆产生极大的风险。 因此,当在复杂的路口环境下,行人、过路行驶车辆与越线行驶等混合交通流对车 7 CN 111554081 A 说 明 书 2/7 页 队产生了较大的威胁,当出现碰撞风险时,仅考虑单领导者的车队协同已显然不能够保证 车队安全通过交叉路口。若此时引入鸽群理论,并采用可切换模式的多领导者控制策略,将 能较好的解决上述问题。
技术实现要素:
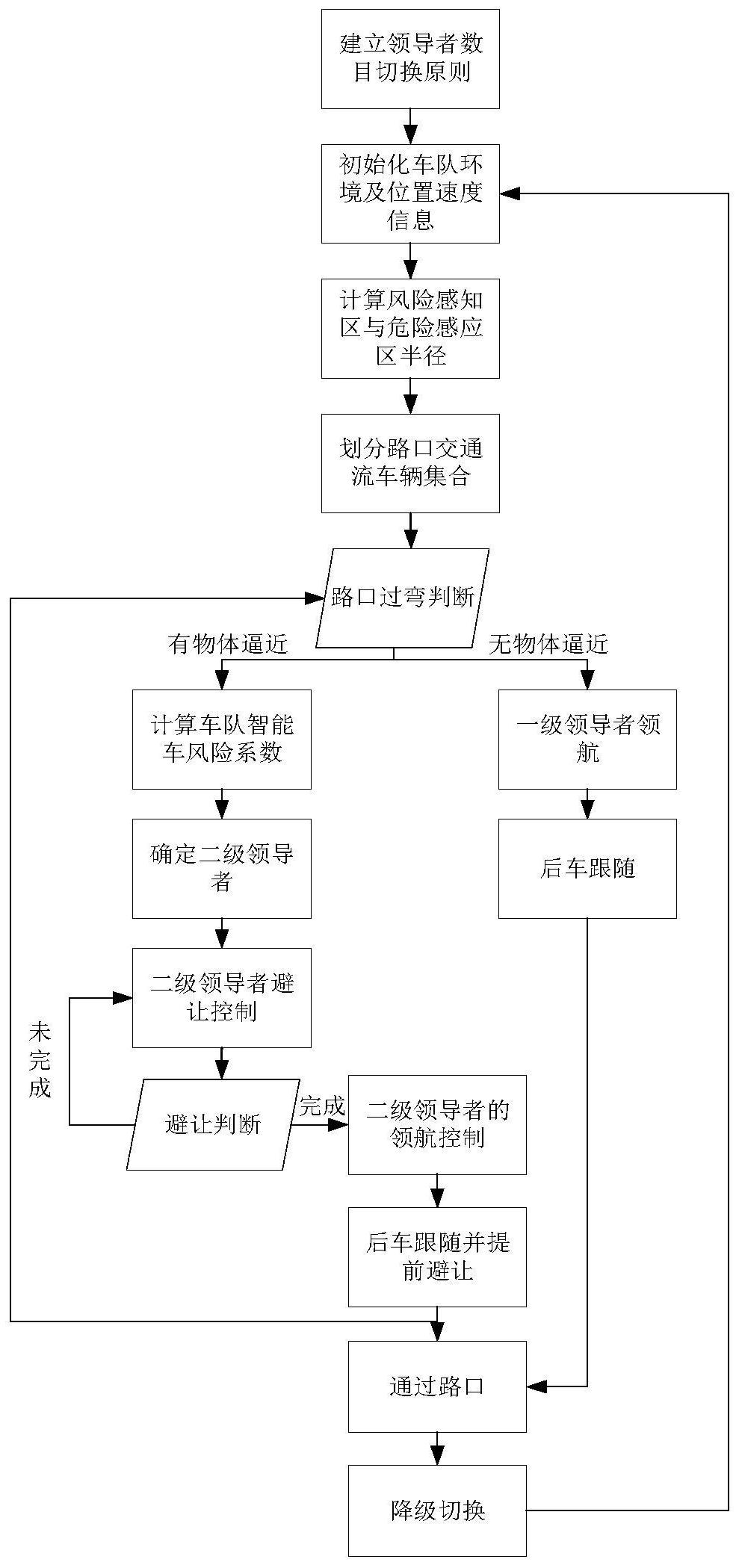
本发明提出的多级领导者切换的车队路口避障控制方法很好解决了上述问题。车 队领导车转弯并进入直行后,旁车或人行道行人逼近车队从属车时,直接受到威胁的从属 车将进行动态避让,运动曲率突然再一次发生较大改变,仿照鸽群模式互切换机制,此时满 足新领导者产生的条件,计算车队每一辆车的风险系数,并定义此刻车队中风险系数最大 的避让车成为二级领导者,其等级在车队中低于一级领导者但高于普通从属车,同时二级 领导车后方跟随车辆不在以头车为领导者,转而以已经做出避让反应的二级领导者为目标 进行跟随,可在跟驰二级领导者下提前做出避让反应,提前进行避让。当车队完成避让顺利 并带领整个车队通过路口开始直线行驶时,二级领导者退出领导,切换为变为普通跟随者。 车队再一次回到初始行驶状态。 该模式切换下的路口避让控制方法考虑到交通流对车队的不同影响,根据旁车贴 近以及行人逼近时计算车队中各车的风险系数,依据危险系数确定二级领导者,同时对二 级领导车和其后从属车采用不同的控制输入,使得二级领导者能够根据其自身风险系数的 大小采取不同程度的避让措施,从而首先保障自身安全的情况下带领后方从属车及时进行 有效的风险规避。 本发明的有益效果: 1、基于对鸽群迁徙的仿生原理研究,提出了一种二级领导者随场景产生并退出的 多级领导者切换的车队协同避让方法,该方法能够有效提升智能车队在交叉路口的通行效 率,提高车队对路口突发事件的避让成功率,在一定程度上解决了智能车队过路口危险多 发的问题,而且达到了路口过弯时动态引导后方车队车辆避让、有效规避风险的同时保障 车队安全通过路口的目的。 2、车队中的二级领导者根据场景的需要出现,由风险系数μi确定,并可根据实际 交通场景进行更新并改变。 3、对于影响车队通过交叉路口的物体根据半径Rcaution与Rdanger大小划分为了三类 集合,并根据三类集合物体对该智能车过路口的风险不同推导出车队中每一辆智能车i的 风险系数μi,该计算方法基于实际交通流场景,能够实时更新风险系数μi并变更车队中的二 级领导者,提升领导效率。 4、将风险系数引入μi人工势场并建立了基于速度变化人工势场的函数模型,更贴 近于实际的交通流场景,提高模型的可用性与实际准确性。 5、对于二级领导者的领航控制引入基于人工势场法的PID反馈控制,加入目标点 的轨迹跟踪预瞄误差反馈的两个特征量。基于时变参数人工势场的PID协调控制能够实现 较高的控制精度以及较快的响应速度,并能够有效的削弱横向误差,进一步保证精度提高 领航的安全性。 8 CN 111554081 A 说 明 书 3/7 页 附图说明 图1为风险感知区与危险感应区示意图; 图2为交通流车辆的集合划分示意图; 图3为车队路口旁车及行人逼近示意图; 图4为车队路口后车轨迹跟踪示意图; 图5为转弯通过路口的避让行为示意图; 图6为旁车逼近时二级领导者与旁车斥力控制输入几何关系示意图; 图7为后车的PID跟随控制示意图; 图8为基于多级领导者鸽群理论的车队路口避障控制方法框图;











