
技术摘要:
本发明公开了一种行走式薄壁部件打磨抛光设备,其包括立柱、垂直滑台、水平机械臂、打磨抛光机、六维力传感器组件和智能控制系统,所述六维力传感器组件连接在所述打磨抛光机、所述水平机械臂之间,用于获取所述打磨抛光机的打磨抛光轮和薄壁部件表面之间的实时接触压 全部
背景技术:
我国是设备制造大国,随着制造技术的不断发展,已经涉足大规模制造商用飞机、 高速轨道列车、舰船和风力发电等大、中型设备,产品种类繁多和外轮廓形状复杂,尤其种 类繁多的大、中型薄壁圆柱体部件。而前述这些大、中型设备制造和维修均需要表面打磨、 抛光和涂装,其中打磨抛光工序,仍然大多依靠工人手握打磨机手工作业,粉尘污染严重和 对工人健康伤害。 发明专利CN108356656A公开了一种气动机械臂及采用该机械臂的自吸尘打磨抛 光系统装置,它可以单人操控、能够连续完成设备各种形状和曲面连贯部位的打磨抛光工 序,结构简单,无需编程,提高生产效率和打磨抛光表面质量,并最大限度減少环境污染和 对工人健康伤害。但是,在打磨薄壁圆柱体部件时,很难避免薄壁圆柱体部件表面被撞变 形,且打磨抛光表面不够均匀、光滑。
技术实现要素:
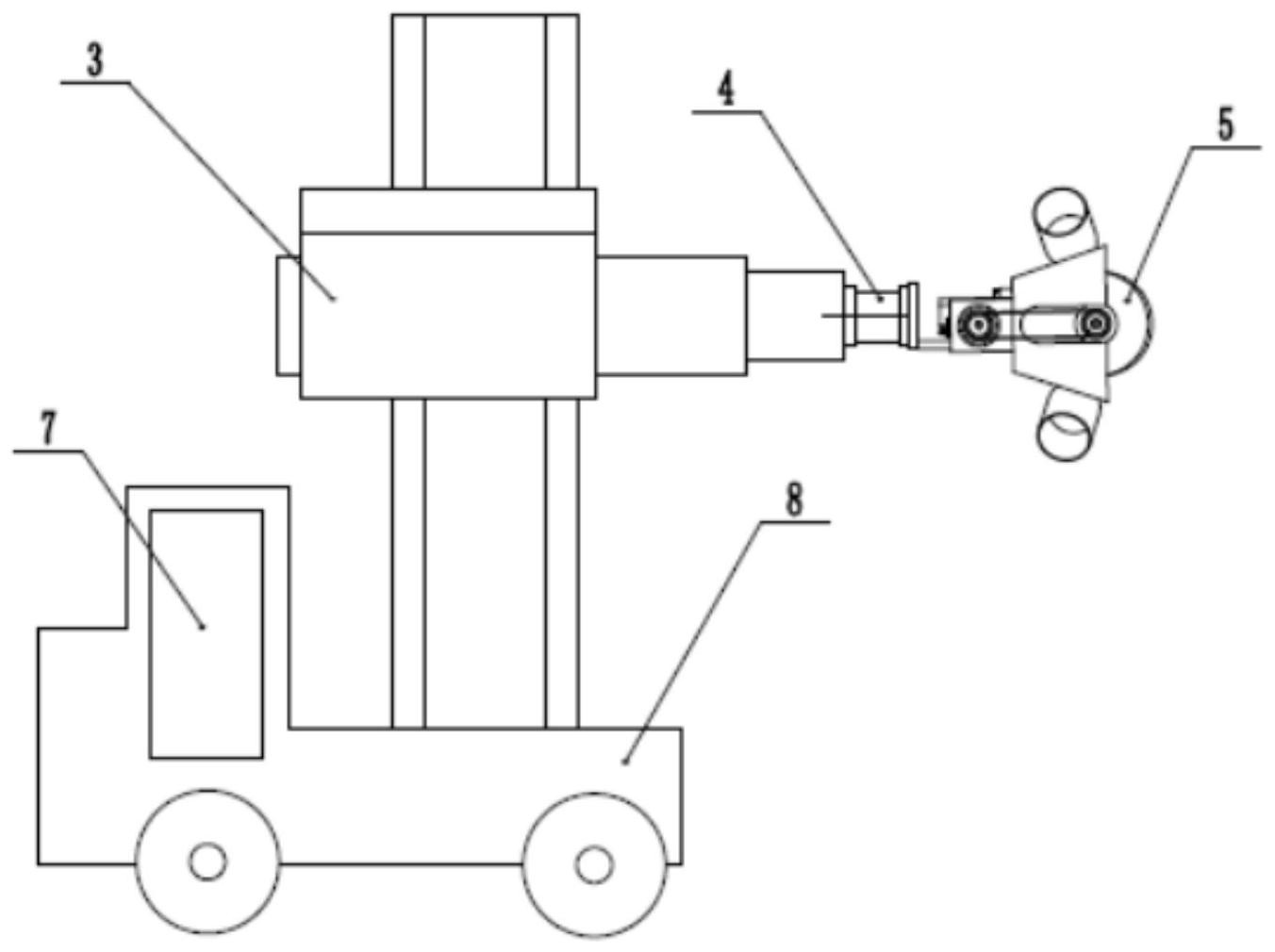
本发明的目的是提供一种行走式薄壁部件的打磨抛光设备,该设备能够避免薄壁 部件表面受热损伤或变形,且打磨抛光表面均匀、光滑,不需要人工再整理。 为了实现上述目的,本发明的技术方案是: 一种行走式薄壁部件的打磨抛光设备,其包括: 立柱、设置在立柱上的垂直滑台、与所述垂直滑台连接的水平机械臂、与水平机械 臂连接的打磨抛光机、六维力传感器组件和智能控制系统, 所述六维力传感器组件连接在所述打磨抛光机、所述水平机械臂之间,用于获取 所述打磨抛光机的打磨抛光轮和薄壁部件表面之间的实时接触压力值; 所述智能控制系统,与所述六维力传感器组件、水平机械臂信号连接,当接触压力 超过预设接触压力值时,控制所述水平机械臂缩回使所述打磨抛光轮自动脱离薄壁部件表 面,当接触压力小于预设接触压力值时,控制所述水平机械臂伸出使所述打磨抛光轮自动 与薄壁部件表面接触。 进一步地,所述智能控制系统还与所述垂直滑台信号连接,以在控制所述水平机 械臂伸出或缩回,在实现所述打磨抛光轮接触或脱离薄壁部件表面的同时,同步控制所述 垂直滑台上下运动,形成圆弧运动轨迹。 进一步地,该行走式薄壁部件打磨抛光设备还包括吸尘器,所述打磨抛光机为自 吸尘打磨抛光机,所述自吸尘打磨抛光机包括吸尘装置, 所述吸尘装置包括防尘罩、吸尘软管,所述吸尘软管与连接所述吸尘器连接。 进一步地,所述打磨抛光机包括打磨抛光轮、与所述打磨抛光轮连接的推轮电推 4 CN 111546223 A 说 明 书 2/6 页 杆,所述推轮电推杆通过微调电机驱动打磨抛光轮低速移动并与薄壁部件表面接触,同时 补偿打磨抛光轮磨损。 进一步地,所述打磨抛光轮包括打磨抛光机支架,连接在打磨抛光机支架上的径 向旋风刷抛光轮、驱动电机,所述驱动电机与径向旋风刷抛光轮驱动连接;所述径向旋风刷 抛光轮包括多片细纤维轮、细纤维和陶瓷研磨颗粒。 进一步地,所述六维力传感器组件包括六维力传感器、以及连接在六维力传感器 两端的法兰, 所述六维力传感器两端的法兰分别与所述打磨抛光机支架、水平机械臂的末端连 接,所述打磨抛光机支架的侧端还装有调压轮。 进一步地,所述垂直滑台包括垂直滑台滑鞍、驱动所述垂直滑台滑鞍上下运动的 垂直滑台传动链, 所述垂直滑台传动链包括:垂直滑台伺服电机、齿轮、齿条、配重链轮、配重链条和 配重块; 其中,所述垂直滑台伺服电机与齿轮传动连接、所述齿轮与齿条连接,所述齿条设 置在立柱上;所述配重链轮设置在立柱顶端,所述配重链条设置在配重链轮上,所述配重链 条一端与垂直滑台滑鞍连接,另一端与配重块连接,所述配重块设置在立柱内。 进一步地,所述垂直滑台包括垂直滑台滑鞍,所述垂直滑台滑鞍上设置有水平机 械臂伺服电机; 所述水平机械臂包括两级伸缩臂,所述两级伸缩臂包括一级伸缩臂和二级伸缩 臂; 所述水平机械臂还包括与水平机械臂伺服电机连接的滚珠丝杆,与滚珠丝杆连接 的滚珠丝杆座,所述滚珠丝杆座与一级伸缩臂连接;水平机械臂伺服电机经滚珠丝杆带动 滚珠丝杆座运动,进而带动与滚珠丝杆座连接的一级伸缩臂移动。 进一步地,所述水平机械臂包括两级伸缩臂,所述两级伸缩臂包括一级伸缩臂和 二级伸缩臂; 所述一级伸缩臂上设有同步带轮和同步带; 所述同步带的两端端头分别与设在垂直滑台的两侧的两个固定点固定连接; 所述同步带的中间端头与设在二级伸缩臂中间位置的固定点固定连接; 所述一级伸缩臂移动使所述同步带移动,同步带移动驱使中间端头移动,从而带 动二级伸缩臂与一级伸缩臂同步移动。 进一步地,该打磨抛光设备还包括电动小车, 在所述电动小车上设置有立柱,垂直滑台,水平机械臂,打磨抛光机,六维力传感 器组件,以及智能控制系统和吸尘器。 本发明与现有技术相比,其有益效果为: 1、本发明是一种适应各种规格薄壁部件表面处理的大、中型柔性打磨抛光设备, 其表面接触压力可预先设定;当接触压力超过设定值时,打磨抛光轮将自动脱离工件表面, 避免碰撞薄壁部件表面造成变形;在连续柔性打磨抛光过程中,保证打磨部件表面均匀、光 滑,不需要人工再整理。 2、本发明采用由径向旋风刷抛光轮为核心的自吸尘打磨抛光机,径向旋风刷抛光 5 CN 111546223 A 说 明 书 3/6 页 轮由多片细纤维轮迭加、用轴串联,所述旋风刷的所有细纤维上附着陶瓷研磨颗粒,具有杰 出柔韧性、最佳贴附性和磨削力持久,作业过程不发热,避免作业表面受热损伤或变形;自 吸尘功能把环境管理提高到全新的水平。 3、本发明采用两个伺服电机运动位置闭环控制,实现垂直滑台和水平机械臂沿立 柱上下交互运动形成圆弧轨迹,两级伸缩臂的同步伸缩带动所述打磨抛光机的打磨抛光轮 接触或脱离工件表面,编程简单快捷;采用两个以微调电机为主的电推杆实现抛光轮低速 接触工件表面和补偿抛光轮磨损。 4、本发明采用人工操纵电动小车装载着立柱、垂直滑台、由两级伸缩臂组成的水 平机械臂、自吸尘打磨抛光机、六维力传感器组件、吸尘器和智能控制系统,以及由人工操 纵的行走式电动小车;利用调压轮分段定位打磨抛光表面,适应不同直径大小、不同长度、 不同厚度的薄壁部件的表面处理。 为了更好地理解和实施,下面结合附图详细说明本发明。 附图说明 图1是本发明的行走式薄壁部件打磨抛光设备结构示意图; 图2是本发明的行走式薄壁部件打磨抛光设备结构示意图; 图3是本发明的垂直滑台结构示意图; 图4是本发明的垂直滑台结构示意图; 图5是本发明的垂直滑台结构示意图; 图6是本发明的水平机械臂结构示意图; 图7是本发明的六维力传感器组件结构示意图; 图8是本发明的打磨抛光机结构示意图。 图9是本发明的打磨抛光轮结构示意图。 图10是本发明的智能控制系统结构框图。











