
技术摘要:
本发明公开了一种三维群无人机并行式多目标搜索协同作业方法,包括以下步骤:程序初始化;根据响应阈值的多目标分配模型完成一次自组织分工;基于子群规模均匀化的多目标分配模型,进行子群内部的资源配置,完成二次分配;采用基于运动学约束特性的自适应惯性权重扩展 全部
背景技术:
受蚂蚁、蜜蜂等社会昆虫的群体行为的启发,学者们提出了群体智能的概念,即由 一组简单的智能体(agent)涌现出来的集体智能(collective intelligence)。群机器人系 统属于典型的人工群体智能系统,由数量众多、结构简单的同构自主机器人组成。通过对个 体能力有限的机器人在特定机制下协调合作,系统能够涌现出智能行为,从而完成相对复 杂的任务。 目标搜索是群机器人系统中最为常见的任务之一。根据搜索对象的数量,目标搜 索可分为单目标搜索和多目标搜索。当群机器人系统被用于单目标搜索任务时,需要着重 注意机器人个体之间的协作控制。在文献《Doctor S ,Venayagamoorthy G K ,Gudise V G .Optimal PSO for collective robotics search applications[c]//congress on Evolutionary Computation.Piscataway,USA:IEEE,2004:1390-1395.》中,Doctor将微粒 群算法扩展后,用于群机器人的目标搜索研究,着重于算法参数的优化。文献《Ducatelle F,di Caro G A,Pinciroli C,et al.Communication assisted navigation in robotic swarms:Self-organization and cooperation[C]//IEEE/RSJ International Conference on Intelligence Robot and Systems .Pisataway ,USA:IEEE,2011:4981- 4988.》中,采用局部无线网通信策略,加强机器人系统内部之间的交流,从而提高搜索效 率。在多目标搜索任务中,群机器人首先根据机器人对目标的感知情况自组织分成子群,然 后由各个不同的子群进行目标搜索。文献《Derr K ,Manic M.Multi-robot,multi-target particle swarm optimization search in noisy wireless environments[C]//2nd Conference on Human System Interaction,Pisataway,USA:IEEE,2009:81-86.》中,根据 RSS目标信号的强度对机器人进行分组,每个小组内部基于分散式微粒群算法进行协调控 制,但此类方法容易造成子群规模不均匀,从而影响搜索效率。,文献《张云正,薛颂东,曾建 潮.群机器人多目标搜索中带闭环调节的动态任务分工[J].机器人,2014(01):59-70.》中, 针对子群规模不均匀的问题,提出了一种带闭环调节的动态任务分工策略进行动态调节, 提高了机器人的搜索效率。,文献《张云正,薛颂东,曾建潮.群机器人多目标搜索中的合作 协同和竞争协同[J].机器人,2015,37(2):142-151.》中,针对并行化搜索中的子群交互问 题,提出了竞争协同和合作协同的策略。然而,采用这一类方法,当参数调节不当时,扩展式 微粒群算法会陷入局部最优点,从而影响群机器人目标搜索的效率。 然而,少有文献讨论上述策略在群无人机多目标搜索中的应用。群无人机多目标 搜索问题的关键在于多目标任务分配和协同控制策略。文献《符小卫,李建,高晓光.带通信 约束的多无人机协同搜索中的目标分配[J].航空学报,2014,35(5) .》中,提出了一种带通 信约束的多无人机协调搜索的目标分配方法,解决了多无人机任务分配的问题。文献《刘 7 CN 111580564 A 说 明 书 2/16 页 重,高晓光,符小卫.带信息素回访机制的多无人机分布式协同目标搜索[J].系统工程与电 子技术,2017(9) .》中,为了提高无人机的协同搜索效率,提出一种带信息素回访的多无人 机分布式协同目标搜索方法。但基于此类方法的多无人机研究,大都局限于恒定高度的二 维平面内的搜索。
技术实现要素:
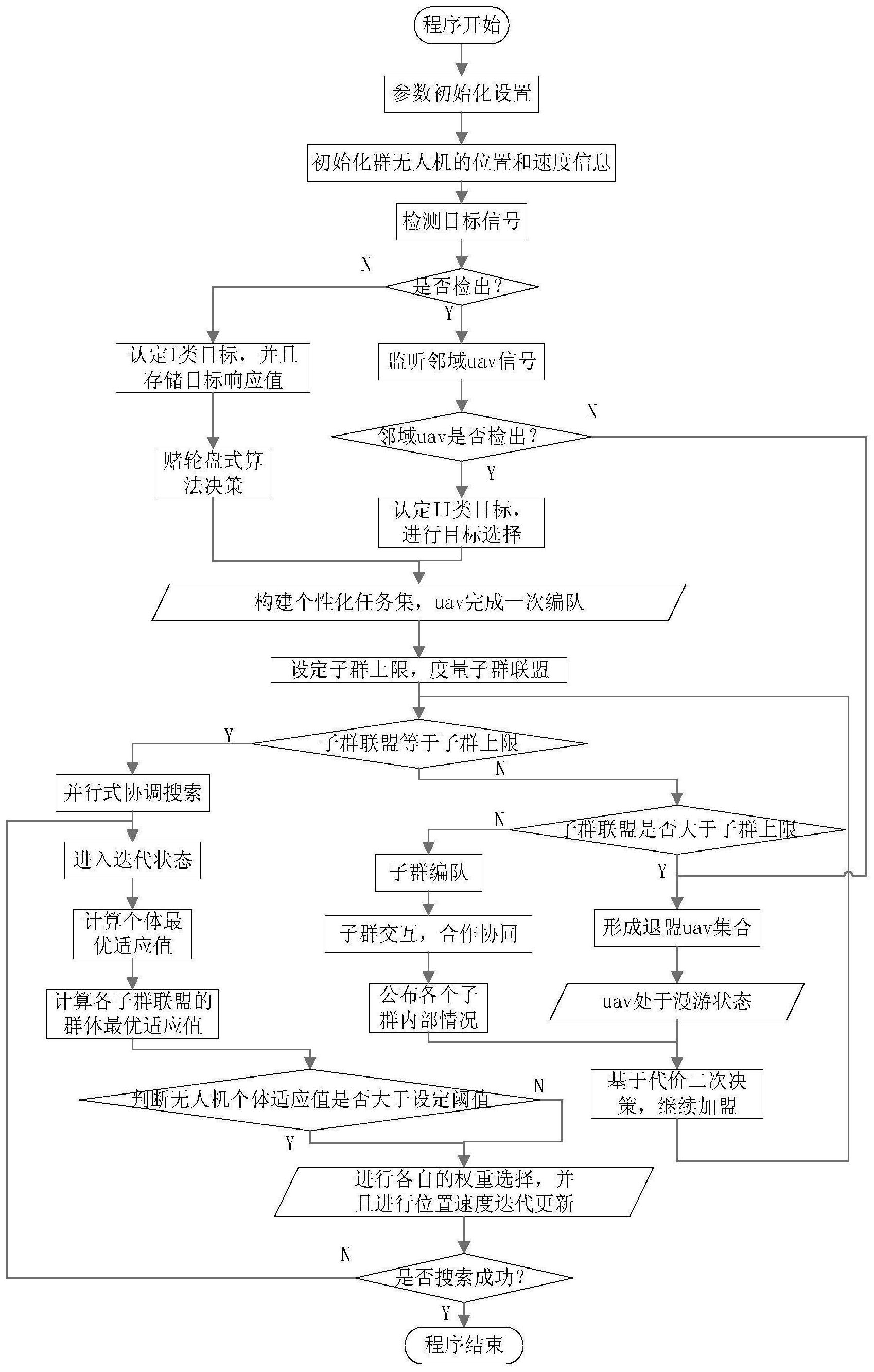
为了解决上述技术问题,本发明提供一种算法简单、搜索效率高的三维群无人机 并行式多目标搜索协同作业方法。 本发明解决上述问题的技术方案是:一种三维群无人机并行式多目标搜索协同作 业方法,包括以下步骤: 步骤一:构建三维空间搜索环境,设定各种参数,随机初始化群无人机位置和速 度,随机初始化目标的位置; 步骤二:检测目标信号,根据响应阈值的多目标分配模型完成一次自组织分工,形 成子群联盟; 步骤三:基于子群规模均匀化的多目标分配模型,进行子群内部的资源配置,完成 二次分配,形成新的子群联盟,使子群内部的无人机资源配置合理化; 步骤四:每个子群内部,围绕一个单目标任务,采用基于运动学约束特性的自适应 惯性权重扩展式微粒群算法进行细粒度目标搜索,无人机进行位置和速度更新; 步骤五:直到所有的子群内部的无人机靠近在搜索目标的附近,则视为搜索成功, 否则,继续迭代,不断更新无人机的位置和速度; 步骤六:建立群无人机并行式搜索性能指标评价模型,然后对评价模型进行收敛 性证明和分析。 上述三维群无人机并行式多目标搜索协同作业方法,所述步骤一中,三维空间R3 搜索环境由三元组{U,T,E}来表示: (1)搜索主体U:U={Ui,i=1,2,...,N},其中,N>>M,N表示群无人机的数量,M表示 目标的数量; (2)搜索对象T:T={Tj,j=1,2,...,M},M>>1; (3)搜索环境E:动态未知环境;其中,无人机群通过自身的传感器检测出目标所携 带的通信装置发出的射频信号,通过无人机与目标、无人机群之间的通信交互,来确定自身 在未知环境下的相对位置信息。 上述三维群无人机并行式多目标搜索协同作业方法,所述步骤二具体步骤为: 2-1)选定某无人机,检测目标信号,判断选定无人机目标信号是否检出,若是,则 进入步骤2-2);否则进入步骤2-3); 2-2)监听所选定无人机的邻域无人机信号,判断邻域无人机目标信号是否检出, 若是,则认定选定无人机为Ⅱ类目标,进行目标选择,进入步骤2-4;否则,选定无人机处于 漫游状态,不参与目标搜索; 2-3)认定此无人机为Ⅰ类目标,并且存储目标响应值,进入步骤2-4); 2-4)构建个性化任务集,采用响应概率评估模型计算出无人机对各个目标的响应 概率,再采用赌轮盘式概率算法做出决策选择搜索目标,无人机完成一次编队,形成子群联 8 CN 111580564 A 说 明 书 3/16 页 盟。 上述三维群无人机并行式多目标搜索协同作业方法,所述步骤2-1)中,目标信号 的检测模型如下式所示: 其中,Q是目标中心发出的恒定信号功率,d表示无人机Ui与目标Tj之间的空间距 离,d0为传感器对目标的最大感应距离,I为目标响应阈值强度,m′为目标能量信号传播条 件下的衰减系数,rand( )表示目标能量信号传播过程中的随机扰动,且为0到1之间服从均 匀分布的随机数; 当无人机与目标的距离小于d0时,无人机能检测到目标的信号,当无人机与目标 的距离超出传感器的最大检测时,此时目标信号无法检出。 上述三维群无人机并行式多目标搜索协同作业方法,所述步骤2-4)中,响应概率 评估用下式表示: 其中,Ij是无人机Ui检测到目标Tj的信号强度,若Ui能够检测出信号目标的数量为 m,则无人机Ui响应目标Tj激励的概率为p(i,j); 无人机Ui决策过程如下式所示: 其中,z为m个目标中所决策出的目标任务序列。 上述三维群无人机并行式多目标搜索协同作业方法,所述步骤三具体步骤为: 3-1)设定子群上限,度量子群联盟:设定群无人机数量为N,目标数量为M,缔结M个 子群联盟,进入步骤3-2); 3-2)判断子群联盟的成员数量Nsub是否等于子群规模上限Nmax, 若是, 则进入步骤四;否则,进入步骤3-3); 3-3)判断子群联盟的成员数量是否大于子群规模上限,若是,则优势地位排序在 子群联盟的规模上限之后的成员无人机退出子群联盟,退盟之后的无人机处于漫游状态, 并与步骤2-2)中处于漫游状态的无人机形成退盟无人机集合;否则,子群联盟做出招募需 求,需求成员量为:Nneed=Nmax-Nsub,进入步骤3-4); 3-4)子群联盟之间相互通信,获得各子群联盟的信息情况,并传达给子群内成员 无人机和退盟无人机集合中的漫游无人机,漫游无人机根据各子群的招募情况,基于代价 二次决策,继续加盟,形成新的子群联盟,然后返回步骤3-2)。 上述三维群无人机并行式多目标搜索协同作业方法,所述步骤3-3)中,子群联盟 内成员无人机优势地位评估的原则是:Ⅰ类目标的优先权大于Ⅱ类目标的优先权;若优先权 9 CN 111580564 A 说 明 书 4/16 页 相同,则按目标激励信号强度的大小进行评估,即:目标信号强度越大的无人机,其优势地 位越高。 上述三维群无人机并行式多目标搜索协同作业方法,所述步骤3-4)中,漫游无人 机基于代价二次决策过程考虑两个因素:①群内部成员各自的招募信息情况,②参与意向 目标的子群中搜索的距离代价; ①漫游无人机的二次加盟代价函数为: 其中,g1为距离代价权重系数,g2为子群需求代价权重系数,Nmax(j)为第j个子群联 盟中的规模上限,d(u,j)为第u个漫游无人机与第j个任务目标之间的距离,La、Lb、Lc分别为 三维空间R3限定区域长度、宽度和高度,Nsub(j)第j个子群联盟中的成员数量,n为漫游无人 机的数量,q为子群规模数量,fuav(u,j)为第u架漫游无人机选择第j个任务目标所付出的代 价值; ②为了优化群无人机并行式搜索的路径,漫游无人机对任务目标所付出的代价越 高,则选择该任务目标的几率越小,漫游无人机二次概率决策如下式: 其中,p′(u,j)为第u个漫游无人机对第j个任务目标的选择概率;当漫游无人机确 定备选目标时,则实时更新所在备选目标的子群招募数量Nneed,并进行子群通信交换信息, 让其它漫游无人机更新子群招募信息、依次进行二次决策;当所有的漫游无人机按二次概 率选择成功时,确定新的子群联盟,完成了群无人机的多目标任务分工。 上述三维群无人机并行式多目标搜索协同作业方法,所述步骤四中,无人机在三 维空间R3中的坐标表示为:(Xu,Yu,Zu),其中Xuav(Xt,Yt,Zt)为无人机t时刻的三维空间位置; 此时,无人机的运动学方程由下式表示: 其中,Vuav(t)为无人机在t时刻的运动速度,θ为Vuav(t)在xoy平面的投影与Y轴的 夹角,β为Vuav(t)在xoy平面的投影与速度Vuav(t)形成的夹角; 无人机的速度分量由下式表示: 其中,Vuav(t)表示无人机在t时刻的速度; 在对比二维群机器人的基础上,考虑三维无人机的运动模型,将三维的运动学约 束特性的微粒群算法应用于群无人机系统中,具体表述如下: 10 CN 111580564 A 说 明 书 5/16 页 其中,Vie(t 1)是无人机t 1时刻的期望速度,XRj(t)和VRj(t)分别表示无人机在t 时刻的位置和速度,α表示无人机的运动惯性因子,β为无人机的步幅控制因子,c1和c2表示 无人机的个体认知系数和社会认知系数,r1和r2为rand( )所生成的随机数,w为惯性权重, X *Rj (t)为群无人机t时刻时的个体历史最优位置,g *Rj (t)为群无人机t时刻时的群体历史最 优位置; 设群无人机搜索的目标的位置为:(Xp,Yp,Zp),第i个无人机的坐标位置为(Xu,Yu, Zu),则无人机目标搜索的适应度函数为: 为了优化群无人机在多目标搜索过程的路径,通过对三维运动学约束特性的微粒 群算法的参数测试,引入一种和目标距离信息相关的自适应惯性权重的三维微粒群算法, 其惯性权值w的调节思想如下:当粒子距离目标的距离过大时,w保持恒定值大范围搜索,当 粒子距离目标位置小于一定距离时,w值随着距离值的更新而实现非线性递减,从而不断逼 近目标点,进行细粒度搜索;神经网络中的sigmoid函数具有非线性逼近能力,而且其极值 范围在0和1之间,由于粒子群中的惯性权重w的取值基本一致,因此,映射关系如下式所示: 将函数引入到与距离相关的群无人机系统中来自适应调节惯性权值大小,具体表 达如下所示: 其中,dl为设定的距离阈值,f(i)为该粒子当前时刻的适应值,即距离值d,w为随 距离值而变化的惯性权重值。 上述三维群无人机并行式多目标搜索协同作业方法,所述步骤六中: 影响群无人机并行式搜索的性能指标主要为:系统能耗S和搜索耗时T;设单个子 群联盟的搜索耗时和系统能耗分别表示为tk和Sk,tk和Sk与系统总能耗S和系统总搜索耗时 T之间的关系如下: T=max{tk,k=1,2,...,M} (14) 其中,单个目标协调搜索的搜索耗时tk和系统能耗Sk计算如下式所示: 11 CN 111580564 A 说 明 书 6/16 页 其中,Nk为第k个子群联盟成员个数,XTk为第k个子群联盟的目标位置,tk表示第k 个子群联盟在迭代t次以后,无人机与目标的距离之和小于阈值ε的最小迭代周期;XRj(t)为 t=tk时的无人机的位置信息;VRj(i)为每迭代一次无人机实际飞行速度,β为步幅控制因 子; 由式(13)-(16)可知:群无人机并行式搜索收敛性的关键在于无人机子群联盟内 部单目标协调搜索的收敛性;假设无人机当前历史最优位置和群体最优位置保持不变,即 X * *Rj (t)和gRj (t)的值为常数A和B,惯性权重w的值恒为常数,将式(9)中的无人机运动学约 束的速度矢量合并如下式所示: 将式(17)中的参数与微粒群算法参数相比较,给定如下定义: 将式(17)(18)相结合,并且令t=t 1迭代,则微粒群算法简化为: 由式(9)(19)化简得差分方程为: 同理,令βC1 βC2=C,由特征方程法求解无人机位置时刻值,然后对其求极限可知 满足其收敛性的解空间为: 取C=2时,即惯性权重收敛的解空间处于区间0到1之间,设定无人机运动惯性因 子α=1,步幅控制因子β=1时,惯性权重的取值在区间0到1之间必然收敛;由(11)(12)式可 知,扩展式微粒群算法的自适应惯性权重的取值为0到0.8之间,其为扩展式微粒群算法收 敛空间的一个子集,故自适应惯性权重扩展式微粒群算法必然收敛;由于群无人机多目标 搜索是由M个目标组合的单目标搜索形式,故由单目标协调搜索的收敛性可知:群无人机并 行式搜索必然收敛于其各自的任务目标点。 本发明的有益效果在于:本发明提出了一种三维群无人机并行式多目标搜索协同 作业方法。首先,在基于目标响应阈值多目标分配模型(TRT)上,引入了闭环调节和合作协 12 CN 111580564 A 说 明 书 7/16 页 同的策略,提出了一种改进响应阈值多目标任务分配模型(ITRT),有效解决了群无人机子 群分布不均匀问题,提高了群无人机并行式搜索的效率。其次,将二维扩展式微粒群(EPSO) 的群机器人协调控制算法引入到三维群无人机上,并将一种改进自适应惯性权重的方法与 三维扩展式粒子群相结合,提出了一种改进自适应惯性权重的三维扩展式微粒群算法 (IAEPSO) ,有效解决了微粒易陷入局部最优点和搜索效率过低的问题。最后,将两种改进的 方法(ITRT IAEPSO)相结合实现群无人机并行式搜索。相比于传统并行式多目标搜索的扩 展式粒子群算法(TRT EPSO),本方法的系统能耗和搜索耗时大大减少,数值仿真验证了该 方法的有效性。 附图说明 图1为本发明的流程图。 图2为T=0时刻成员无人机的位置分布图。 图3为T=10时刻成员无人机的位置分布图。 图4为T=20时刻成员无人机的位置分布图。 图5为T=30时刻成员无人机的位置分布图。 图6为T=60时刻成员无人机的位置分布图。 图7为T=135时刻成员无人机的位置分布图。 图8为各成员无人机多目标搜索路径示意图。 图9为群无人机系统搜索耗时对比统计图。 图10为群无人机系统搜索总能耗对比统计图。











