
技术摘要:
本发明公开了一种红外定位系统、定位方法及其应用,红外定位系统包括:至少三个外源红外发射单元、WiFi路由器和至少一个红外接收单元;红外发射单元用于发射特定频率和强度的红外光线,并通过WiFi路由器传送至红外接收单元;红外接收单元用于接收外源红外发射单元发射 全部
背景技术:
1.常见室内定位技术的特征 (1)WiFi定位技术 目前WiFi是相对成熟且应用较多的技术,这几年有不少公司投入到了这个领域。 WiFi室内定位技术主要有两种。WiFi定位一般采用“近邻法”判断,即最靠近哪个热点或基 站,即认为处在什么位置,如附近有多个信源,则可以通过交叉定位(三角定位),提高定位 精度。 由于WiFi已普及,因此不需要再铺设专门的设备用于定位。用户在使用智能手机 时开启过Wi-Fi、移动蜂窝网络,就可能成为数据源。该技术具有便于扩展、可自动更新数 据、成本低的优势,因此最先实现了规模化。 不过,WiFi热点受到周围环境的影响会比较大,精度较低。为了做得准一点有公司 就做了WiFi指纹采集,事先记录巨量的确定位置点的信号强度,通过用新加入的设备的信 号强度对比拥有巨量数据的数据库,来确定位置。 由于采集工作需要大量的人员来进行,并且要定期进行维护,技术难以扩展,很少 有公司能把国内的这么多商场定期的更新指纹数据。特别的,数据采集受环境影响比较大, 尤其对于人员定位,由于环境变化较大,定位漂移现象尤其严重。 (2)RFID定位 RFID定位的基本原理是,通过一组固定的阅读器读取目标RFID标签的特征信息 (如身份ID、接收信号强度等),同样可以采用近邻法、多边定位法、接收信号强度等方法确 定标签所在位置。 这种技术作用距离短,一般最长为几十米。但它可以在几毫秒内得到厘米级定位 精度的信息,且传输范围很大,成本较低。同时由于其非接触和非视距等优点,可望成为优 选的室内定位技术。 目前,射频识别研究的热点和难点在于理论传播模型的建立、用户的安全隐私和 国际标准化等问题。优点是标识的体积比较小,造价比较低,但是作用距离近,不具有通信 能力,而且不便于整合到其他系统之中,无法做到精准定位,布设读卡器和天线需要有大量 的工程实践经验难度大。 (3)红外定位 红外线是一种波长在无线电波和可见光波之间的电磁波。红外定位主要有两种具 体实现方法,一种是将定位对象附上一个会发射红外线的电子标签,通过室内安放的多个 红外传感器测量信号源的距离或角度,从而计算出对象所在的位置。 这种方法在空旷的室内容易实现较高精度,可实现对红外辐射源的被动定位,但 4 CN 111596259 A 说 明 书 2/10 页 红外很容易被障碍物遮挡,传输距离也不长,因此需要大量密集部署传感器,造成较高的硬 件和施工成本。此外红外易受热源、灯光等干扰,造成定位精度和准确度下降。 该技术目前主要用于军事上对飞行器、坦克、导弹等红外辐射源的被动定位,此外 也用于室内自走机器人的位置定位。 另一种红外定位的方法是红外织网,即通过多对发射器和接收器织成的红外线网 覆盖待测空间,直接对运动目标进行定位。 这种方式的优势在于不需要定位对象携带任何终端或标签,隐蔽性强,常用于安 防领域。劣势在于要实现精度较高的定位需要部署大量红外接收和发射器,成本非常高,因 此只有高等级的安防才会采用此技术。 2.TOF镜头原理 TOF镜头是由光源、光学部件、传感器(TOF芯片)、控制电路以及处理电路等几部单 元组成。这种技术跟3D激光传感器原理基本类似,只不过3D激光传感器是逐点扫描,而TOF 相机则是同时得到整幅图像的深度信息。TOF相机是通过入、反射光探测来获取的目标距离 获取。 不过与普通光学镜头不同的是这里需要加一个带通滤光片来保证只有与照明光 源波长相同的光才能进入。同时由于光学成像系统具有透视效果,不同距离的场景为各个 不同直径的同心球面,而非平行平面,所以在实际使用时,需要后续处理单元对这个误差进 行校正。 作为TOF的相机的核心,TOF芯片每一个像元对入射光往返相机与物体之间的相位 分别进行纪录。该传感器结构与普通图像传感器类似,但比图像传感器更复杂,它包含2个 或者更多快门,用来在不同时间采样反射光线。大多数机器的测量结果受外界环境干扰较 为明显,尤其是受外界光源干扰,导致测量距离较常规测量仪器短,一般不超过10米。 现有的室内定位系统主要存在以下几个问题: 1.现有的室内的定位方式极易收到外源因素干扰导致定位不准确,同时在室内无 法使用GPS定位。 2.由于TOF镜头载体光源较弱,且在外源光线影响导致定位不准确。 3.现有的红外织网技术采用被动式地检测红外光源与遮挡物的距离,极易受到干 扰导致定位不准确。同时,当室内人员数量上升后为保证定位精度而不得不增加红外光源 与感受器数量导致安装成本较高。
技术实现要素:
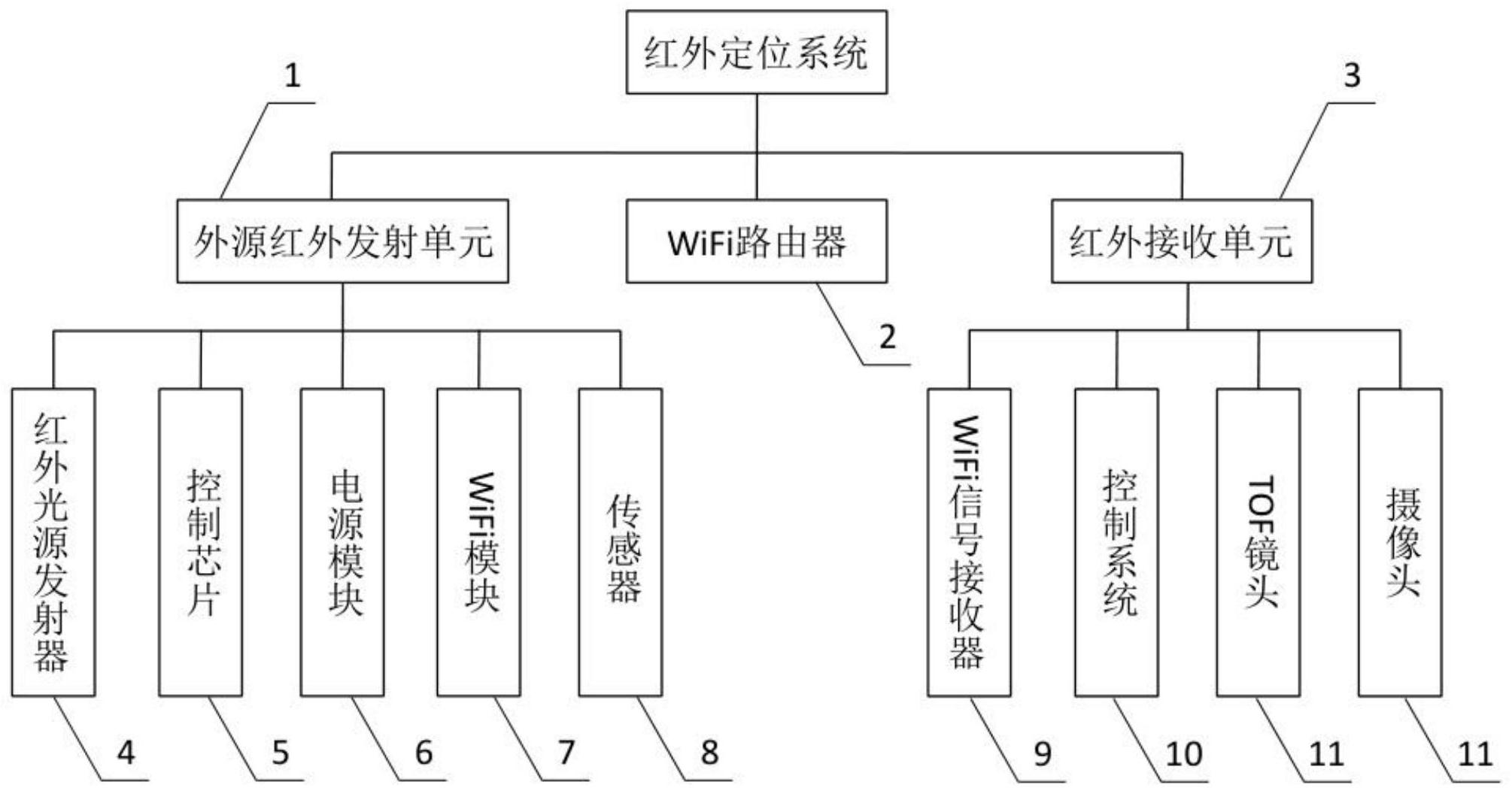
针对现有技术中存在的缺陷,本发明的目的是提供一种红外定位系统、定位方法 及其在可视化导航中的应用。 本发明解决技术问题所采用的技术方案是:一种红外定位系统,包括:至少三个外 源红外发射单元、WiFi路由器和至少一个红外接收单元;所述外源红外发射单元用于发射 特定频率和强度的红外光线,并将发射的红外光线信息通过所述WiFi路由器传送至所述红 外接收单元;所述WiFi路由器用于传输红外光线信息;所述红外接收单元用于接收外源红 外发射单元发射的红外光线和通过WiFi路由器传送的红外光线信息;所述红外光线信息包 括所述外源红外发射单元的位置信息、红外光线闪烁的频率与时点。 5 CN 111596259 A 说 明 书 3/10 页 进一步地,所述外源红外发射单元包括至少一个红外光源发射器、控制芯片、电源 模块和WiFi模块;所述红外光源发射器用于发射特定频率和强度的红外光线,所述控制芯 片用于调节控制红外光线的频率和强度,所述电源模块用于为外源红外发射单元中的各组 成部件提供能量支持,所述WiFi模块用于传送所述红外光源发射器发射的红外光线信息。 进一步地,所述外源红外发射单元中还包括传感器,所述传感器为TOF镜头、心率 感受器、血压感受器、湿度感受器、温度感受器、声纹识别感受器、指纹识别感受器中的任意 一种或多种组合。 进一步地,所述红外接收单元包括WiFi信号接收器、TOF镜头、控制系统;所述WiFi 信号接收器用于接收所述WiFi路由器传送的红外光线信息,所述TOF镜头用于接收所述外 源红外发射单元发射的红外光线信息,所述控制系统用于分析处理接收到的红外光线信 息。 进一步地,所述红外接收单元内还包括摄像头,所述摄像头为自然光摄像头,用于 将环境中捕捉到的自然光线成像;所述控制系统用于分析处理接收到的红外光线信息和自 然光线成像信息。 一种红外定位系统的红外定位方法,所述红外定位方法包括图像描点定位法、多 点红外光源定位法或图像描点定位法与多点红外光源定位法两者的结合;在外部光源干扰 较强或定位距离较远的环境中,优先采纳“图像描点定位法”的定位结果;在外部光源干扰 较弱或定位距离较近的环境中,优先采纳“多点红外光源定位法”的定位结果。 进一步地,所述多点红外光源定位法具体为:在三个或三个以上不同的空间位置 处分别设置所述外源红外发射单元,在待定位位置上设置红外接收单元;待定位位置的TOF 镜头捕捉到各个已知坐标系位置的外源红外发射单元,并通过TOF飞秒算法测定该待定位 位置到捕捉到的任意三个外源红外发射单元的距离,即可确定该待定位位置的坐标系位 置。 进一步地,所述图像描点定位法具体为:在三个或三个以上不同的空间位置处分 别设置所述外源红外发射单元,在待定位位置上设置红外接收单元;当待定位位置的TOF镜 头捕捉到三个或三个以上已知坐标系位置的外源红外发射单元时,先选择其中任意两个外 源红外发射单元,记为A、B,利用光学测距的方式确定待定位位置到A、B两个外源红外发射 单元的距离;再选择其他任意两点,此处任意两点不可同时为A、B,利用光学测距的方式确 定待定位位置到这两点外源红外发射单元的距离;最后基于前述计算结果,即待定位位置 与至少任意三个外源红外发射单元的距离,以及已知前述各个外源红外发射单元的坐标系 位置,便可计算得到待定位位置的坐标系位置。 一种红外定位系统在可视化导航中的应用,所述应用主要包括如下内容:在空间 内安装若干个外源红外发射单元,将所述外源红外发射单元的位置信息与空间内周边环境 的位置信息输入电子数据库,所述外源红外发射单元的位置信息与空间内周边环境的位置 信息合成导航图;红外接收单元设于用户的移动设备上,用户在起点位置确定终点位置后, 便可通过红外定位系统定位,生成导航路线,实现可视化导航;所述外源红外发射单元的位 置信息与空间内周边环境的位置信息可通过WiFi模块进行调整。 进一步地,所述导航图包括俯视平面实时导航图和/或平视3D实时导航图。 本发明中提供的红外定位系统主要可通过两种方法实现空间内定位,同时亦可将 6 CN 111596259 A 说 明 书 4/10 页 两种方法结合使用以提升定位精度。两种定位方式准确性的判断方式是在一定时间段内, 对两种方法测距的多次结果进行可信度检验,当红外光源收到自然光线干扰较多的情况 下,“多点红外光源定位法”所得结果离散程度必然高于“图像描点定位法”。而在自然光线 干扰较少的情况下,由于“图像描点定位法”收到TOF镜头透镜真实曲率与测量数据偏差的 影响,其结果离散程度必然高于“多点红外光源定位法”。所以,可以通过比较两类方法计算 结果的可信度来选择采用其中之一,进而提高定位的精确性。 本发明中提供的外源红外发射单元中还可以装配各种传感器,包括TOF镜头、心率 感受器、血压感受器、湿度感受器、温度感受器、声纹识别感受器、指纹识别感受器等,可与 多种设备配合使用,应用于多种场合。如将装载有湿度感受器的外源红外发射单元安装在 对湿度敏感设备上,但在环境内没有网络信号,则可以通过本发明中的外源红外发射单元 以“摩斯密码”或其他密码信号释放报警信号;又如将装载有心率、血压感受器的外源红外 发射单元安装在使用者身上,当该使用者发生健康问题时也可以通过外源红外发射单元发 送救助信息。这种方法可以使用在无网络信号的环境中,或者是在特定的安保要求下。 本发明的有益效果是:与现有技术相比,本发明提供的红外定位系统解决了现有 的室内定位方式极易受到外源光线因素干扰导致定位不准确,同时在室内无法使用GPS定 位的困境;可用于实现室内测距、室内定位;本发明采用外源红外发射单元,解决了传统的 TOF测距使用的自身发出的红外光线,光源强度受自身的电力和装备大小限制,难以实现远 距离高精度定位的缺陷;本发明提供的红外定位系统主要可通过两种方法实现空间内定 位,同时亦可将两种方法结合使用以提升定位精度。在外部光源干扰较强或定位距离较远 的环境中,优先采纳“图像描点定位法”的定位结果;在外部光源干扰较弱或定位距离较近 的环境中,优先采纳“多点红外光源定位法”的定位结果。 附图说明 图1为实施例1中提供的红外定位系统的结构组成框图。 图2为实施例1中提供的红外定位系统的定位原理示意图。 图3为实施例2中提供的红外定位系统的结构组成框图。 图4为实施例2中提供的红外定位系统的定位原理示意图。 图5为实施例2中提供的红外定位系统的定位原理示意图。 图6为本发明在平层环境下的俯视平面地形图。 图7为本发明在平层环境下的俯视平面导航图。 图8和图9为本发明在多层环境下的俯视平面实时导航图。 图10为本发明的平视3D建筑结构图。 图11-13为本发明的模拟用户视线3D实时导航图。 其中,1-外源红外发射单元;2-WiFi路由器;3-红外接收单元;4-红外光源发射器; 5-控制芯片;6-电源模块;7-WiFi模块;8-传感器;9-WiFi信号接收器;10-控制系统;11-TOF 镜头;12-摄像头。











