
技术摘要:
本发明提供了一种无线紫外光协作无人机编队保持拓扑中最优路径选择方法,首先利用紫外光非直视单次散射模型,建立机间通信路径;再利用通信链路的路径损耗及节点的剩余能量设置路径权值;最后通过Floyd算法利用路径权值得到编队内任意无人机节点之间的最优通信路径。本 全部
背景技术:
近年来,无人机相关的新兴产业迎来了一个高速发展时期。无人机在民用领域和 军事领域发挥了重要的作用。由于单个无人机计算、探测和作业能力有限,使用多无人机协 作的形式能充分提高无人机执行任务的能力。无人机“蜂群”编队是由一群自主组网协同作 业的小型无人机构成,具有成本低、抗毁性高、感知能力好、协作能力强和功能分布化等优 良特性,能够极大提高任务完成效率。 无人机通信网络具有自组织特点,其电子系统极易受到电磁脉冲、无线电频率干 扰、高强度辐射场等的影响,因此采用一种抗干扰能力强的无人机集群内部通信方式是非 常迫切的。无人机蜂群飞行中采用无线紫外光通信技术,其优势主要有以下几点:背景噪声 小;抗干扰能力强;全天候非直视(non-line-of-sight,NLOS)通信;低功耗易于集成。将无 线紫外光通信技术应用于无人机蜂群机间通信,可以满足复杂战场环境中无人机的可靠隐 秘通信需求。 无人机编队在实际应用中携带能源有限,当无人机在编队保持过程中,某无人机 向其余任意无人机传递消息或进行指令颁发时,通过设置合理的路径权值并寻找一条通信 代价最小的路径,可有效减少单个节点的发射功率及系统总功率,避免在通信过程中多次 选择同一路径而忽略节点的能量情况,均衡无人机节点的能量消耗,延长无人机网络生命 周期。因此提出了一种无线紫外光协作无人机编队保持拓扑中最优路径选择方法。。 需要注意的是,本部分旨在为权利要求书中陈述的本发明的实施方式提供背景或 上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现要素:
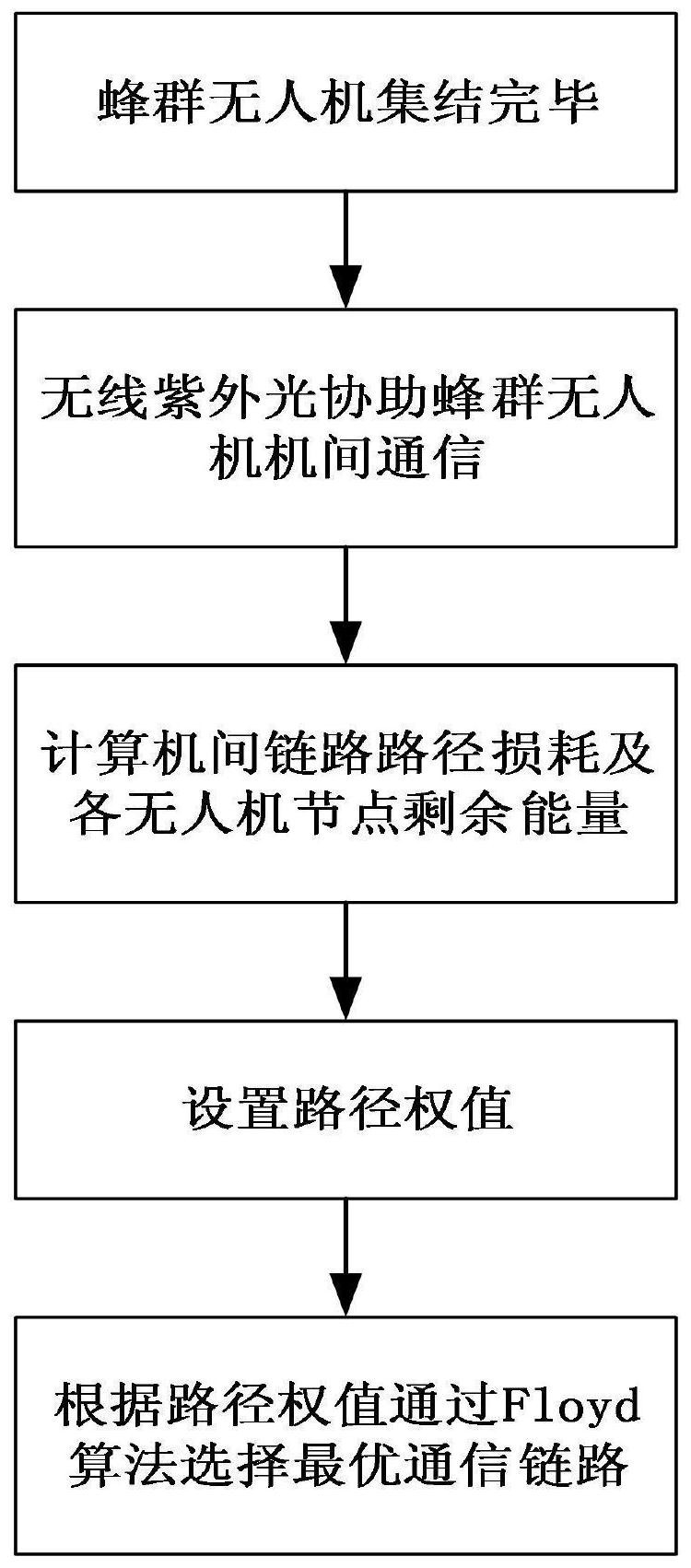
本发明目的在于提供了一种无线紫外光协作无人机编队保持拓扑中最优路径选 择方法,解决了无人机编队机间通信的可靠性问题,均衡无人机节点能量消耗,延长网络生 命周期。 为实现上述目的本发明采用如下技术方案: 无线紫外光协作无人机编队保持拓扑中最优路径选择方法,其特征在于,包括以 下步骤: S1:利用紫外光非直视单次散射模型,建立机间通信路径; S2:利用通信链路的路径损耗及节点的剩余能量设置路径权值; S3:通过Floyd算法利用路径权值得到编队内任意无人机节点之间的最优通信路 径。 进一步地,上述步骤S2具体如下: 4 CN 111601355 A 说 明 书 2/5 页 S201:计算两个无人机节点通信链路的路径损耗; 以椭球坐标系为基础,将紫外光发射装置与接收装置分别安放在椭球坐标系的两 个焦点上,紫外光非直视通信的路径损耗为: L=ξrα (1) 其中,r为通信距离,ξ为路径损耗因子,α为路径损耗指数; S202:计算无人机节点的剩余能量; 编队集结完毕之后各无人机节点的剩余能量为: 其中,e0为无人机节点的初始能量,P为移动能耗,mp是有效载荷质量,单位为kg,mv 是无人机的质量,单位为kg,r是升阻比,η是电机和螺旋桨的能量传递效率,p为电子器件的 功耗,单位为kW,v=dii/t为无人机集结过程中的平均速度,单位为km/h,dii为无人机集结 过程中由初始位置到编队内固定位置运动的距离,t为集结时间; S203:设置路径权值; 根据计算的路径损耗及各节点的剩余能量设置路径权值: 其中,α1与α2为权值系数,L为通信链路的路径损耗, 为通信链路路径损耗均值, 为节点剩余能量均值,erest为节点剩余能量。 进一步地,上述步骤S3具体如下: S301:初始化无人机UAVi和UAVj之间的路径权值,当两个无人机之间可以直接通信 时,利用步骤S2计算无人机UAVi和UAVj之间的路径权值;当两个无人机之间通信需要经过其 他无人机节点进行消息转发时,路径权值为无穷; S302:在无人机UAVi和UAVj间加入顶点UAV1,比较UAVi,UAV1与UAVj和UAVi与UAVj的 路径权值,取其中权值小的路径作为UAVi到UAVj的且顶点号不大于1的最优路径; S303:在无人机UAVi到UAVj间加入顶点UAV2,得UAVi,...,UAV2和UAV2,...,UAVj,其 中,UAVi,...,UAV2是UAVi到UAV2的且中间顶点号不大于1的最优路径;UAV2,...,UAVj是UAV2 到UAVj的且中间顶点号不大于1的最优路径;将UAVi,...,UAV2,...,UAVj与步骤S302中求得 最优路径进行比较,取其中较短的路径作为UAVi到UAVj的且中间顶点号不大于2的最优路 径; S304:以此类推,经过n次比较和修正,在第n-1步将求得UAVi到UAVj的且中间顶点 号不大于n-1的最优路径,即为无人机编队内任意两节点UAVi到UAVj的最优通信路径。 本发明的有益效果: 1)本发明采用无线紫外光协作无人机蜂群编队飞行具有全天候、非直视、不受射 频干扰和隐秘通信等优势,能为无人机蜂群在强电磁干扰环境中顺利执行任务提供有效保 障。 2)本发明根据通信链路的路径损耗和节点剩余能量设置路径权值,可以避免在通 信过程中多次选择同一条路径而忽略该路径节点的能量情况,从而导致节点过早死亡,延 5 CN 111601355 A 说 明 书 3/5 页 长网络生命周期。 附图说明 图1为本发明无线紫外光协作无人机编队保持拓扑中最优路径选择方法的流程 图; 图2为本发明紫外光非直视单次散射通信模型图; 图3为本发明发送接收仰角和路径损耗关系图; 图4为本发明无人机编队飞行网络拓扑结构图。











