
技术摘要:
本发明公开了一种仿生智能机器人,包括设置在底盘的驱动机构,所述驱动机构的四角设有驱动杆,所述驱动机构设有驱动驱动杆的气泵;所述驱动机构设有两组驱动装置,分别驱动两侧的主动轮,所述主动轮两端设有从动轮组一和从动轮组二;升降机构,所述升降机构设有升降臂 全部
背景技术:
机器人应用技术在近年来受到很多工业和学校的重视,为了加强对学生提高技能 技术,很多学校激励学生自主设计机器人参见不同项目的比赛,目前的参赛机器人装置存 在的主要问题是:竞技比赛要综合考量运动快速、稳 定、动作准确、敏捷等因素,但现有机 器人将装置机构设置复杂化,却容易造成机器人动作误判断,随之误动作、准确性差, 整个 机器人的工作效率大大降低。
技术实现要素:
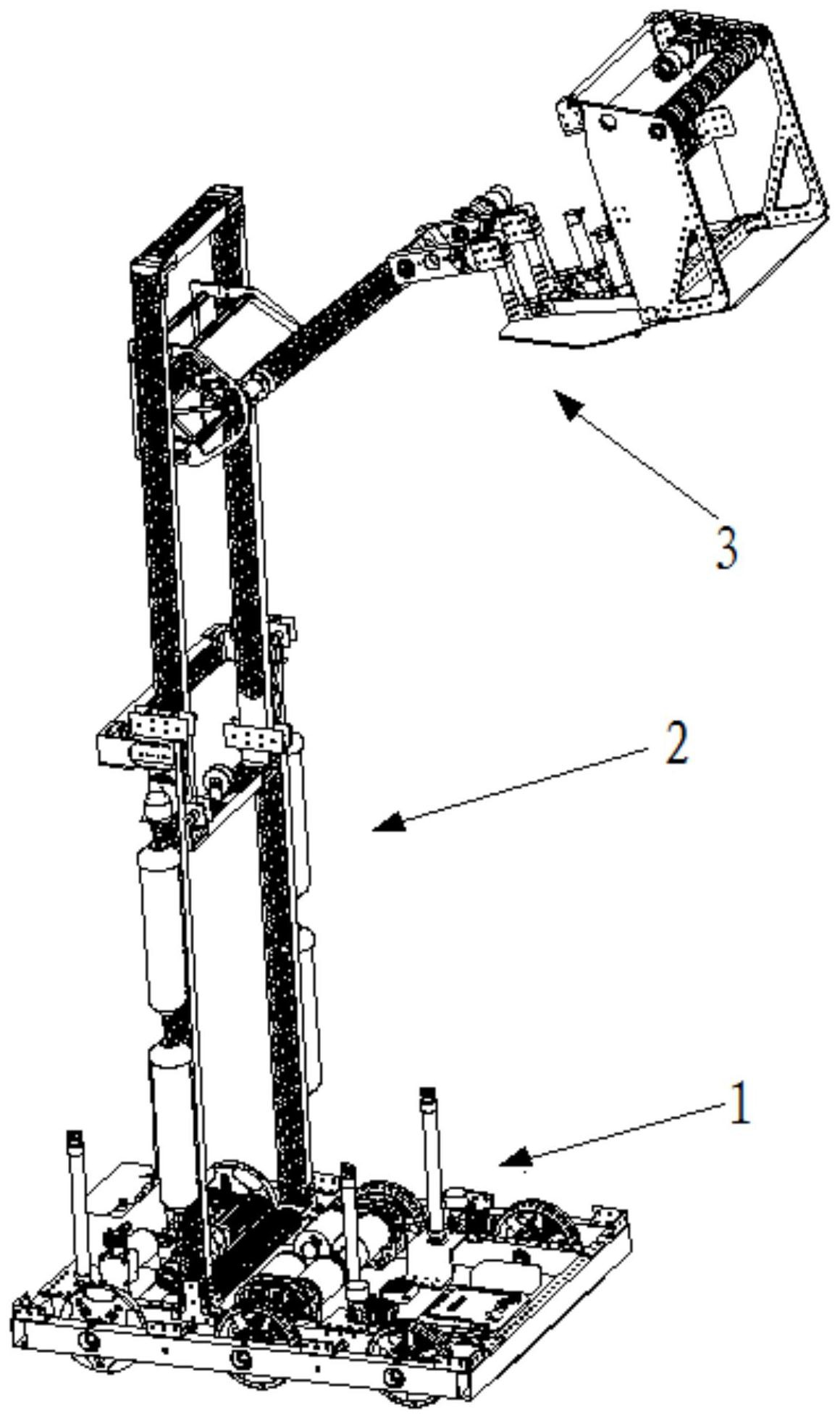
本发明的目的在于提供一种仿生智能机器人,以解决现有技术中装置机构设置复 杂化、效率低的缺陷。 一种仿生智能机器人,包括, 设置在底盘的驱动机构,所述驱动机构的四角设有驱动杆,所述驱动机构设有驱动驱 动杆的气泵;所述驱动机构设有两组驱动装置,分别驱动两侧的主动轮,所述主动轮两端设 有从动轮组一和从动轮组二; 升降机构,所述升降机构设有升降臂一、升降臂二,所述升降臂二滑动设于升降臂一 内,所述升降臂二通过升降电机进行驱动; 夹爪机构,所述夹爪机构与升降臂二连接,所述夹爪机构包括支撑臂一、支撑臂二,所 述支撑臂二连接有吸盘,所述支撑臂一和支撑臂二转角电机连接。 优选地,其中一侧所述主动轮通过传动组件一与同侧的从动轮组一连接,另一侧 所述主动轮通过传动组件二与同侧的从动轮组二连接。 优选地,所述升降臂一的顶部设有限位杆,所述限位杆设有滑轮一,所述升降臂二 底部设有滑轮二,所述滑轮二连接有牵引机构,所述牵引机构穿过滑轮一与升降电机输出 端连接。 优选地,所述牵引机构为牵引绳。 优选地,所述支撑臂一设有连轴,所述连轴设有转角齿轮,所述转角电机的输出端 通过主动齿轮与转角齿轮连接。 优选地,所述吸盘连接有气压缸。 优选地,所述细盘设有用于辅助抓取的滚轮。 优选地,所述升降臂一的侧部设有用于限制升降臂二的导向轮。 优选地,所述驱动装置为双轴电机。 优选地,所述驱动杆为气缸,所述气缸的动力输出端设有万向轮。 3 CN 111590539 A 说 明 书 2/3 页 与现有技术相比,本发明所达到的有益效果: 1、本发明采用底盘一体化,通过设置三组行走轮,提高机器人的通过性,两侧的从动轮 与主动轮采用逐级连接,保证了底盘一端没有附着力的同时,另一端依然保持动力; 2、本发明采用在底盘四角设置驱动杆,通过驱动杆的升降提高机器人的通过性,通过 控制一端或者一侧的驱动杆轻松跨越障碍。 3、本发明采用简单的升降机构,提高升降效率,进一步提高夹爪机构抓取效率; 4、本发明夹爪通过电机带动机械臂转动转动一方面提高了转动速率,另一方面提高了 精准度; 5、本发明夹爪采用吸盘进行吸附并且通过在吸盘前端设置滚轮进行辅助减少摩擦。 附图说明 图1是本发明的整体结构示意图; 图2是本发明的升降机构示意图; 图3是本发明的夹爪机构示意图; 图4是本发明的驱动机构示意图。 图中:1、驱动机构;11、底盘;111、升降电机;12、驱动装置; 13、主动轮; 14、从动 轮组一;15、传动组件一;16、气泵;17、驱动杆;18、从动轮组二;19、传动组件二;2、升降机 构;21、升降臂一;22、升降臂二;23、滑轮一;24、滑轮二;25、导向轮;26、牵引机构;27、限位 杆;3、夹爪机构;30、固定板;31、滚轮;32、支撑臂一;33、转角齿轮;34、主动齿轮;35、转角电 机;36、连轴;37、支撑臂二;38、吸盘;39、气压缸;40、固定架。











